Vous aimerez peut-être aussi
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- SailPointCustomConnectors PDFDocument17 pagesSailPointCustomConnectors PDFprudhvi reddy0% (1)
- 6T40 45 Diag FixesDocument69 pages6T40 45 Diag Fixesjosue100% (12)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- IBM-Tandy Guide for Secret Weapons of the LuftwaffeDocument41 pagesIBM-Tandy Guide for Secret Weapons of the Luftwaffetestinghb100% (1)
- Impact of Gadgets on Learning in Senior High StudentsDocument16 pagesImpact of Gadgets on Learning in Senior High StudentsBlessing Joy Capiz83% (36)
- Base Station Antennas1Document66 pagesBase Station Antennas1redha_rebaiPas encore d'évaluation
- Alcatel Support Document For Cable System in CubaDocument11 pagesAlcatel Support Document For Cable System in CubaDEGNISSODEPas encore d'évaluation
- N-Channel Low QG Mosfet 30V, 100A, 3.3m: MOS-TECH Semiconductor Co.,LTDDocument9 pagesN-Channel Low QG Mosfet 30V, 100A, 3.3m: MOS-TECH Semiconductor Co.,LTDAnonymous p1ig0zX6p0Pas encore d'évaluation
- Microstrip AntennaDocument24 pagesMicrostrip AntennaUdit Sharma100% (1)
- Trouble ShootingDocument3 pagesTrouble Shootingsami4330Pas encore d'évaluation
- Cathode Ray Oscilloscope (Cro)Document2 pagesCathode Ray Oscilloscope (Cro)jesunathan44@yahoo.comPas encore d'évaluation
- Saudi Technical Trade Test - Welder CategoryDocument4 pagesSaudi Technical Trade Test - Welder CategoryshabashakkimPas encore d'évaluation
- TUK EECQ 5291 - Professional Engineering Practice - April 2018Document314 pagesTUK EECQ 5291 - Professional Engineering Practice - April 2018gaza manPas encore d'évaluation
- Accumulation-Mode Varactor Optimization for 200Q RF ICsDocument2 pagesAccumulation-Mode Varactor Optimization for 200Q RF ICsmenguemenguePas encore d'évaluation
- Irf 744 PBFDocument8 pagesIrf 744 PBFPosada Burgueño CarlosPas encore d'évaluation
- PHCbi Refrigerators MPRS163 MPRS313Document2 pagesPHCbi Refrigerators MPRS163 MPRS313Eslam HassanPas encore d'évaluation
- White Paper c11 737101Document13 pagesWhite Paper c11 737101Aleksandar PopovicPas encore d'évaluation
- Louie Langas Resume 2019Document1 pageLouie Langas Resume 2019Louie LangasPas encore d'évaluation
- 8 Most Useful Dynamic Management Views and Functions I Often UseDocument18 pages8 Most Useful Dynamic Management Views and Functions I Often UsePrasanna KirtaniPas encore d'évaluation
- Coke Bottle Tutorial For MayaDocument42 pagesCoke Bottle Tutorial For MayadumbledoreaaaaPas encore d'évaluation
- Effects of Cryogenic Cooling on Grinding Forces, Temperature and Residual StressesDocument9 pagesEffects of Cryogenic Cooling on Grinding Forces, Temperature and Residual StressesChirag JainPas encore d'évaluation
- Aceros PoscoDocument35 pagesAceros PoscoregistrosegPas encore d'évaluation
- Create Custom Pane Programmatically For Panels in Drupal 7Document2 pagesCreate Custom Pane Programmatically For Panels in Drupal 7CoklatPas encore d'évaluation
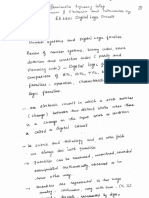
- Digital Logic Families GuideDocument82 pagesDigital Logic Families Guidemoney_kandan2004Pas encore d'évaluation
- WRCLA Designers HandbookDocument11 pagesWRCLA Designers HandbookHoang NguyenPas encore d'évaluation
- Consolidation: Photocopiable © University of Dayton Publishing, 2012Document3 pagesConsolidation: Photocopiable © University of Dayton Publishing, 2012borboleta_sPas encore d'évaluation
- Solid WastesDocument47 pagesSolid WasteskevinjorgeramosPas encore d'évaluation
- Durehete 1055Document5 pagesDurehete 1055alextentwenty100% (1)
- FD-SOI and FinFET Technologies ComparedDocument25 pagesFD-SOI and FinFET Technologies ComparedDhanishtha SinghPas encore d'évaluation
- PNG382 FT en 11Document2 pagesPNG382 FT en 11Misu1983Pas encore d'évaluation