Vous aimerez peut-être aussi
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- 28 JuneDocument6 pages28 JunePrakharGuptaPas encore d'évaluation
- Iot Based RobotDocument2 pagesIot Based RobotPrakharGupta100% (1)
- 24 JuneDocument1 page24 JunePrakharGuptaPas encore d'évaluation
- 27 JuneDocument1 page27 JunePrakharGuptaPas encore d'évaluation
- 23 JuneDocument1 page23 JunePrakharGuptaPas encore d'évaluation
- 20 JuneDocument1 page20 JunePrakharGuptaPas encore d'évaluation
- 16 JuneDocument3 pages16 JunePrakharGuptaPas encore d'évaluation
- 14 JuneDocument2 pages14 JunePrakharGuptaPas encore d'évaluation
- Lecture Notes For Digital ElectronicsDocument43 pagesLecture Notes For Digital ElectronicsShruti GuptaPas encore d'évaluation
- 22 JuneDocument1 page22 JunePrakharGuptaPas encore d'évaluation
- 17 JuneDocument3 pages17 JunePrakharGuptaPas encore d'évaluation
- 15 JuneDocument2 pages15 JunePrakharGuptaPas encore d'évaluation
- 13 June'Document1 page13 June'PrakharGuptaPas encore d'évaluation
- Btech-III Year Electronics Engineering 170715Document22 pagesBtech-III Year Electronics Engineering 170715Sandeep Kr AryaPas encore d'évaluation
- 21 JuneDocument1 page21 JunePrakharGuptaPas encore d'évaluation
- Btech-III Year Electronics Engineering 170715Document22 pagesBtech-III Year Electronics Engineering 170715Sandeep Kr AryaPas encore d'évaluation
- Notes For SsDocument75 pagesNotes For SsSantosh Reddy ChadaPas encore d'évaluation
- Question Bank of Network Analysis and Synthesis UNIT-1 and UNIT-2Document9 pagesQuestion Bank of Network Analysis and Synthesis UNIT-1 and UNIT-2PrakharGupta100% (1)
- Ques. Bank E Maths-III PDFDocument8 pagesQues. Bank E Maths-III PDFPrakharGuptaPas encore d'évaluation
- Lecture Notes For Digital ElectronicsDocument43 pagesLecture Notes For Digital ElectronicsShruti GuptaPas encore d'évaluation
- Ques. Bank E Maths-III PDFDocument8 pagesQues. Bank E Maths-III PDFPrakharGuptaPas encore d'évaluation
- Question Bank of Network Analysis and Synthesis UNIT-1 and UNIT-2Document9 pagesQuestion Bank of Network Analysis and Synthesis UNIT-1 and UNIT-2PrakharGupta100% (1)
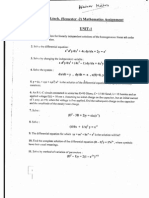
- Maths AssignmentDocument9 pagesMaths AssignmentPrakharGuptaPas encore d'évaluation
- Environmental ScienceDocument319 pagesEnvironmental Scienceneboydc100% (17)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Mathematical Model of Transportation ProblemDocument14 pagesMathematical Model of Transportation ProblemwasimghghPas encore d'évaluation
- Flashprint UserGuide en USDocument44 pagesFlashprint UserGuide en USdreamelarn100% (2)
- SIMULATION of EMERGENCY ROOMS USING FLEXSIMDocument10 pagesSIMULATION of EMERGENCY ROOMS USING FLEXSIMBrandon VarnadorePas encore d'évaluation
- Research On RosesDocument6 pagesResearch On RoseskirilkatzPas encore d'évaluation
- Jurnal Teknologi Technoscientia Issn: 1979-8415 Vol. 5 No. 2 Februari 2013Document7 pagesJurnal Teknologi Technoscientia Issn: 1979-8415 Vol. 5 No. 2 Februari 2013DENNIHERPas encore d'évaluation
- Canal RegulatorDocument13 pagesCanal RegulatorBibhuti Bhusan Sahoo100% (1)
- Learning Activity Sheet In: Computer Systems ServicingDocument12 pagesLearning Activity Sheet In: Computer Systems ServicingCarvalds 0315100% (1)
- Recent Advances in Biophoton Research and Its Applications - Quantum Theory of Biophoton EmissionDocument54 pagesRecent Advances in Biophoton Research and Its Applications - Quantum Theory of Biophoton Emissionfrederic dugenouxPas encore d'évaluation
- Thesis DocumentDocument21 pagesThesis DocumentChris Lorenz83% (18)
- Solution Stoichiometry 1Document54 pagesSolution Stoichiometry 1Johncy MoradaPas encore d'évaluation
- Investigatory Project Chemistry PH in Everyday LifeDocument23 pagesInvestigatory Project Chemistry PH in Everyday LifeHarshita Jain67% (3)
- NuPolar Quality Testing and ComparisonsDocument12 pagesNuPolar Quality Testing and Comparisonsou82muchPas encore d'évaluation
- Doppler Log NotesDocument4 pagesDoppler Log Notesss_tayade100% (1)
- ESM Upgrade To 72 PDFDocument46 pagesESM Upgrade To 72 PDFsantoshs2002848Pas encore d'évaluation
- Brake Disc ProposalDocument12 pagesBrake Disc ProposalNiko KoPas encore d'évaluation
- Pedal Power Generation 0Document5 pagesPedal Power Generation 0super meal coleenPas encore d'évaluation
- Cisco Nexus 9300 ACI Fixed Spine Switches: Product OverviewDocument7 pagesCisco Nexus 9300 ACI Fixed Spine Switches: Product OverviewMahmoud RamadanPas encore d'évaluation
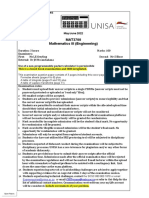
- MAT3700-MayJune ExamDocument3 pagesMAT3700-MayJune ExamNhlanhla NdebelePas encore d'évaluation
- How Does An Air Ejector Work?Document2 pagesHow Does An Air Ejector Work?rajishrrrPas encore d'évaluation
- 74LVC14APWDHDocument11 pages74LVC14APWDHIlie GrecuPas encore d'évaluation
- Qbake - Production Planning Guide - Bread Line.Document27 pagesQbake - Production Planning Guide - Bread Line.ahetPas encore d'évaluation
- MRM Assignment Written Analysis FormatDocument2 pagesMRM Assignment Written Analysis FormatMd AliPas encore d'évaluation
- Robotics 1 - Coordinate SystemDocument102 pagesRobotics 1 - Coordinate System15.Rushikesh IrabattinPas encore d'évaluation
- Strategik Sains THN 4Document9 pagesStrategik Sains THN 4fletchertchrPas encore d'évaluation
- Isoquants and Returns To ScaleDocument14 pagesIsoquants and Returns To ScaleAniket ChatterjeePas encore d'évaluation
- Air-Pollution-Meteorology UNIT IIDocument91 pagesAir-Pollution-Meteorology UNIT IIDR. Ramesh ChandragiriPas encore d'évaluation
- 8085 and 8051 PresentationDocument54 pages8085 and 8051 PresentationJitendra Chuugh100% (3)
- Presupposition: A Short PresentationDocument13 pagesPresupposition: A Short PresentationShaimaa SuleimanPas encore d'évaluation
- Phenomenology and Social Reality - Essays in Memory of Alfred Schutz (PDFDrive)Document316 pagesPhenomenology and Social Reality - Essays in Memory of Alfred Schutz (PDFDrive)Muhammad SyarofuddinPas encore d'évaluation