Vous aimerez peut-être aussi
- Antoniou Inductance-Simulation CircuitDocument10 pagesAntoniou Inductance-Simulation CircuitVale Conde CuatzoPas encore d'évaluation
- Rfid Security Access Control System: Submitted byDocument20 pagesRfid Security Access Control System: Submitted byVale Conde CuatzoPas encore d'évaluation
- Nexys4 PDM RefProj2 V2Document12 pagesNexys4 PDM RefProj2 V2Vale Conde Cuatzo100% (2)
- MultirateDocument99 pagesMultirateVale Conde CuatzoPas encore d'évaluation
- Import Ise SummaryDocument10 pagesImport Ise SummaryVale Conde CuatzoPas encore d'évaluation
- Comb-Based Decimation Filters For 61 A/D Converters: Novel Schemes and ComparisonsDocument11 pagesComb-Based Decimation Filters For 61 A/D Converters: Novel Schemes and ComparisonsVale Conde CuatzoPas encore d'évaluation
- 08/04/2014 01:19:40 P.M. C:/Users/VALENTIN/Documents/eagle/placa/chua - BRDDocument1 page08/04/2014 01:19:40 P.M. C:/Users/VALENTIN/Documents/eagle/placa/chua - BRDVale Conde CuatzoPas encore d'évaluation
- Nexys2 ISE 12 - 2 Decoder TutorialDocument15 pagesNexys2 ISE 12 - 2 Decoder TutorialVale Conde CuatzoPas encore d'évaluation
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (345)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Etap - Relay CoordinationDocument311 pagesEtap - Relay CoordinationManohar Potnuru100% (1)
- QA/QC Filling INDEX: North Gas Compression Plants (NGCP) Pipelines Index File Name File #Document3 pagesQA/QC Filling INDEX: North Gas Compression Plants (NGCP) Pipelines Index File Name File #deva017Pas encore d'évaluation
- Project Report JamiaDocument76 pagesProject Report JamiaShoaibPas encore d'évaluation
- V8 Pro BRDocument20 pagesV8 Pro BRwtn2013Pas encore d'évaluation
- SearchBot Results For Touchstone 1Document6 pagesSearchBot Results For Touchstone 1CPas encore d'évaluation
- Electra BrochureDocument10 pagesElectra BrochureVërshim KastratiPas encore d'évaluation
- Introduction To Surveying PDFDocument27 pagesIntroduction To Surveying PDFArseni MaximPas encore d'évaluation
- CAAYE Annual Report 2013Document26 pagesCAAYE Annual Report 2013Rahul MirchandaniPas encore d'évaluation
- Principles of Accounting, Volume 2: Managerial AccountingDocument59 pagesPrinciples of Accounting, Volume 2: Managerial AccountingVo VeraPas encore d'évaluation
- Pragmatic Electrical Engineering: FundamentalsDocument201 pagesPragmatic Electrical Engineering: FundamentalsaminmominPas encore d'évaluation
- Illumination: "The Established Leader Ee Review"Document6 pagesIllumination: "The Established Leader Ee Review"IVex Brykz Jay Ro60% (5)
- LPIC-2 Exam PrepDocument882 pagesLPIC-2 Exam PrepcuthieuPas encore d'évaluation
- Ice Plant TrainerDocument1 pageIce Plant TrainerVirender RanaPas encore d'évaluation
- Starter MP EecDocument21 pagesStarter MP EecIshan 96Pas encore d'évaluation
- Tutorial Joint Push Pull - English - V1.1 - 20 Feb 08Document31 pagesTutorial Joint Push Pull - English - V1.1 - 20 Feb 08shadownrunPas encore d'évaluation
- Poly BoreDocument2 pagesPoly BoreMarian OpreaPas encore d'évaluation
- Ece T 2012 ToppersDocument13 pagesEce T 2012 ToppersRajesh LingamalluPas encore d'évaluation
- STR Mpa-MpmDocument8 pagesSTR Mpa-MpmBANGGAPas encore d'évaluation
- Nvidia CompanyDocument4 pagesNvidia CompanyaaaPas encore d'évaluation
- WRO 2018 WeDo RegularDocument14 pagesWRO 2018 WeDo RegularAlaas AlvcaszaPas encore d'évaluation
- Advant Controller 4050series eDocument124 pagesAdvant Controller 4050series eABVSAIPas encore d'évaluation
- CRMDocument15 pagesCRMPradeep ChintadaPas encore d'évaluation
- Appendix I - AirDocument155 pagesAppendix I - AirTown of Colonie LandfillPas encore d'évaluation
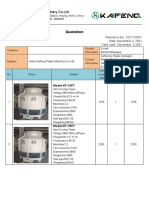
- KAIFENG Quotation For 150T Cooling TowerDocument13 pagesKAIFENG Quotation For 150T Cooling TowerEslam A. FahmyPas encore d'évaluation
- LAB 1 HandoutDocument2 pagesLAB 1 HandoutManuGearPas encore d'évaluation
- Ms 95-2018 Solved AssignmentDocument15 pagesMs 95-2018 Solved AssignmentPramod ShawPas encore d'évaluation
- Normas ISO TelecomunicacionesDocument38 pagesNormas ISO Telecomunicacionesjolao AlmeidaPas encore d'évaluation
- LC 2539Document16 pagesLC 2539Kelly JonesPas encore d'évaluation
- Ellis Patents Cable Cleats Complete CatalogueDocument28 pagesEllis Patents Cable Cleats Complete CataloguefndprojectPas encore d'évaluation
- Palfinger PK 15500 Load ChartDocument2 pagesPalfinger PK 15500 Load ChartD Chandra Sekhar100% (2)