Vous aimerez peut-être aussi
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- Practical 01: % Generate Signal Exp (-T) . Cos (2 Pi T) and Combined OperationDocument3 pagesPractical 01: % Generate Signal Exp (-T) . Cos (2 Pi T) and Combined OperationSeema P DiwanPas encore d'évaluation
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Total List Ex MptedDocument160 pagesTotal List Ex MptedSeema P DiwanPas encore d'évaluation
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Mod 1 PG Introduction To PQDocument91 pagesMod 1 PG Introduction To PQSeema P DiwanPas encore d'évaluation
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- Research MethodologyDocument12 pagesResearch MethodologySeema P DiwanPas encore d'évaluation
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Awces B Tech Electrical 15-16Document40 pagesAwces B Tech Electrical 15-16Seema P DiwanPas encore d'évaluation
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- Revised Bloom's Taxonomy: Bloom's Cognitive Lev El Descriptor Verbs 1 Remember IngDocument2 pagesRevised Bloom's Taxonomy: Bloom's Cognitive Lev El Descriptor Verbs 1 Remember IngSeema P DiwanPas encore d'évaluation
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- Programme Outcomes Objectives UGDocument1 pageProgramme Outcomes Objectives UGSeema P DiwanPas encore d'évaluation
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Interview 2015Document92 pagesInterview 2015Seema P DiwanPas encore d'évaluation
- Faq 266Document4 pagesFaq 266Seema P DiwanPas encore d'évaluation
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Signals and Systems SyllabusDocument3 pagesSignals and Systems SyllabusSeema P DiwanPas encore d'évaluation
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- Controldesk Next Generation - No Data Are Visible in The PlotterDocument3 pagesControldesk Next Generation - No Data Are Visible in The PlotterSeema P DiwanPas encore d'évaluation
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Assignment 2: Mrs. Seema P Diwan Walchand College of EngineeringDocument6 pagesAssignment 2: Mrs. Seema P Diwan Walchand College of EngineeringSeema P DiwanPas encore d'évaluation
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- Faq 210Document4 pagesFaq 210Seema P DiwanPas encore d'évaluation
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- Assignment 3: Mrs. Seema P Diwan Walchand College of EngineeringDocument9 pagesAssignment 3: Mrs. Seema P Diwan Walchand College of EngineeringSeema P DiwanPas encore d'évaluation
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (345)
- Fourier and Wavelet AnalysisDocument514 pagesFourier and Wavelet AnalysisSeema P DiwanPas encore d'évaluation
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- Self Tuning FilterDocument7 pagesSelf Tuning FilterSeema P Diwan0% (1)
- Analysis and Control of DSTATCOM For A Line Voltage RegulationDocument6 pagesAnalysis and Control of DSTATCOM For A Line Voltage RegulationSeema P DiwanPas encore d'évaluation
- Sugar Sector PDF - 1608046711Document29 pagesSugar Sector PDF - 1608046711Mustafa Farooq100% (1)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- 6991 1767 01b - Diamec U4 - LRDocument4 pages6991 1767 01b - Diamec U4 - LRPABLOPas encore d'évaluation
- Fayat Activity Report 2020 - en - Page by Page - Low Resolution - 0Document44 pagesFayat Activity Report 2020 - en - Page by Page - Low Resolution - 0arlyPas encore d'évaluation
- Introduction To MicroWavesDocument5 pagesIntroduction To MicroWavesKrish_666Pas encore d'évaluation
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- A Brief Overview of Porous SiliconDocument15 pagesA Brief Overview of Porous SiliconFelix Lu100% (1)
- UT Dallas Syllabus For Phys3341.001.11f Taught by Mark Lee (mxl101000)Document5 pagesUT Dallas Syllabus For Phys3341.001.11f Taught by Mark Lee (mxl101000)UT Dallas Provost's Technology GroupPas encore d'évaluation
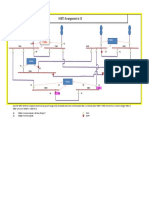
- HSBTS Diagram PDFDocument1 pageHSBTS Diagram PDFMayurPas encore d'évaluation
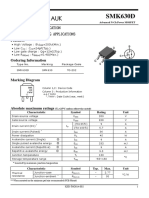
- SMK 630 DDocument8 pagesSMK 630 DMuhammad Chaidir FhadlyPas encore d'évaluation
- Form V - Sugar - UnitDocument11 pagesForm V - Sugar - UnitKiran KalePas encore d'évaluation
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Self Cleaning Hydro ScreensDocument4 pagesSelf Cleaning Hydro ScreenssavuPas encore d'évaluation
- Aula Balancim DifusaoDocument29 pagesAula Balancim DifusaoGabrielAntoniazziPas encore d'évaluation
- 1 s2.0 S002236972200364X MainDocument16 pages1 s2.0 S002236972200364X MainFatima NPas encore d'évaluation
- 10 Themes For 2024Document38 pages10 Themes For 2024eskender93Pas encore d'évaluation
- 31 Getting Your Refrigerator To RDocument19 pages31 Getting Your Refrigerator To Rraypower2004Pas encore d'évaluation
- Catalog Solar-PV String Inverters Hopewind V4.3.1Document14 pagesCatalog Solar-PV String Inverters Hopewind V4.3.1Atiq SaberPas encore d'évaluation
- Puma Energy - JPM Bond ConferenceDocument30 pagesPuma Energy - JPM Bond ConferenceKA-11 Єфіменко ІванPas encore d'évaluation
- MF1547Electric Panel PDFDocument24 pagesMF1547Electric Panel PDFAhmad Ali NursahidinPas encore d'évaluation
- Proceedings CIB W062 2018 SymposiumDocument354 pagesProceedings CIB W062 2018 SymposiumdplumbingPas encore d'évaluation
- Bruce E. Depalma: N-Machine: Extraction of Electrical Energy Directly From Space: The N-MachineDocument7 pagesBruce E. Depalma: N-Machine: Extraction of Electrical Energy Directly From Space: The N-MachinebanzailoicPas encore d'évaluation
- HO2 Sensor InfoDocument24 pagesHO2 Sensor InfoÇağrı SivrikayaPas encore d'évaluation
- Part Cat-Soil Compactor BW 212Document218 pagesPart Cat-Soil Compactor BW 212Dhru Ti100% (7)
- Learning Module No. 4 - Aircraft Air Conditioning and Pressurization SystemDocument36 pagesLearning Module No. 4 - Aircraft Air Conditioning and Pressurization SystemDavidSamsonPas encore d'évaluation
- Lab3E8 - Series and Parallel PumpDocument8 pagesLab3E8 - Series and Parallel PumpRaied Basam0% (1)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- NSGAFÖU 1,8/3 KV: Product InformationDocument3 pagesNSGAFÖU 1,8/3 KV: Product InformationAttila HorvathPas encore d'évaluation
- Miller 652 and 812 Owners Manualo278aj - MilDocument44 pagesMiller 652 and 812 Owners Manualo278aj - MilrobertoarellanocastiPas encore d'évaluation
- Expt 8.7 Finding The Formula of Copper OxideDocument2 pagesExpt 8.7 Finding The Formula of Copper OxideIra Munirah0% (2)
- Shaffer Et Al. - 2003 - Foraging Effort in Relation To The Constraints ofDocument9 pagesShaffer Et Al. - 2003 - Foraging Effort in Relation To The Constraints ofBenjamin MendezPas encore d'évaluation
- W22 Homework #8 AnwsersDocument4 pagesW22 Homework #8 Anwsersiamayesha725Pas encore d'évaluation
- 28 Psychrometric ProcessesDocument19 pages28 Psychrometric ProcessesPRASAD326100% (7)
- TALAT Lecture 1253: CreepDocument26 pagesTALAT Lecture 1253: CreepCORE Materials100% (1)
- 2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersD'Everand2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersÉvaluation : 5 sur 5 étoiles5/5 (1)
- Digital Filmmaking: The Ultimate Guide to Web Video Production for Beginners and Non-Professionals, Learn Useful Tips and Advice on How You Can Create, Film and Edit Your VideosD'EverandDigital Filmmaking: The Ultimate Guide to Web Video Production for Beginners and Non-Professionals, Learn Useful Tips and Advice on How You Can Create, Film and Edit Your VideosÉvaluation : 5 sur 5 étoiles5/5 (1)