Académique Documents
Professionnel Documents
Culture Documents
Siste Made Control e
Transféré par
desrtyCopyright
Formats disponibles
Partager ce document
Partager ou intégrer le document
Avez-vous trouvé ce document utile ?
Ce contenu est-il inapproprié ?
Signaler ce documentDroits d'auteur :
Formats disponibles
Siste Made Control e
Transféré par
desrtyDroits d'auteur :
Formats disponibles
UNIVERSIDADE PAULISTA UNIP
Everton da Silva Santos
Jarlison Alex Maia
Sistemas de superviso e controle de grupos
geradores a diesel
MANAUS
2011
UNIVERSIDADE PAULISTA UNIP
Everton da Silva Santos
Jarlison Alex Maia
Sistemas de superviso e controle de grupos
geradores a diesel
Trabalho de concluso de curso apresentado
para obteno do titulo de graduao em
engenharia eltrica com modalidade em
eletrnica da Universidade Paulista UNIP.
Orientador: Prof Marcelo Oliveira
MANAUS
2011
FICHA CATALOGRFICA
Elaborada pela bibliotecria Maria Izabel da C. Nunes 11 Reg./409-Am
S237s Santos, Everton da Silva
Sistema de superviso e controle de grupos geradores a diesel. /
Everton da Silva Santos, Jarlison Alex dos Reis Maia. Manaus : UNIP
Instituto de Cincias Exatas e Tecnologia, 2011
70p.: il.; figuras ,tabelas; 29 cm
Inclui bibliografia.
Trabalho de Concluso de Curso (TCC) para obteno do ttulo de
Bacharel em Engenharia Eltrica(eletrnica)apresentado pela Universidade
Paulista UNIP/ Instituto de Cincias Exatas e Tecnologia, 2011.
Orientador: Prof.Msc. Marcelo Oliveira
1.Superviso e controle 2.Gerador a diesel 3. Microcontrolador PIC
18F4550 I. Oliveira, Marcelo II. Ttulo
CDU 62:681.5
EVERTON DA SILVA SANTOS
JARLISON ALEX DOS REIS MAIA
SISTEMAS DE CONTROLE E SUPERVISO DE GRUPOS GERADORES A
DIESEL
Trabalho de concluso de curso apresentado
para obteno do titulo de graduao em
engenharia eltrica com modalidade em
eletrnica da Universidade Paulista UNIP.
Aprovado em:_____/_____/____.
BANCA EXAMINADORA
________________________________________
Prof. Marcos Dantas dos Santos
Universidade Paulista UNIP
________________________________________
Prof. Valdenice Pavone Rodrigues Silva
Universidade Paulista UNIP
________________________________________
Prof. Marcelo Silva Pereira
Universidade Paulista UNIP
DEDICATRIA
Dedico este trabalho a Deus meu Senhor, a minha famlia, em especial a minha
esposa e a minha me e irm pela pacincia e pela dedicao com qual tem
conduzido as nossas vidas durante todos os anos.
Everton da Silva Santos
DEDICATRIA
Dedico este trabalho memria de meu filho, Marcos Paulo, que em vida, me
mostrou o quanto devemos nos agarra a toda e qualquer esperana, a minha me
que me mostrou que tudo podemos s basta acreditar e fazer por onde alcana, a
minha irm que sempre me deu fora, aos professores que contriburam para que
hoje estivssemos aqui defendendo este projeto.
Jarlison Alex Maia
AGRADECIMENTOS
Digno s, Senhor nosso e Deus nosso, de receber a glria, a honra e o poder, pois
tu criaste todas as coisas, e por tua vontade existem e foram criadas Ap. 4:11
Sempre na vida iremos precisar das pessoas, isso de fundamental importncia,
por isso agradecemos a Deus e nosso Senhor por essa oportunidade que nos foi
dada, e tambm aos nossos familiares que nos deu apoio para realizao deste
trabalho, os mais sinceros agradecimentos:
Ao orientador deste trabalho, pelos seus conhecimentos e sua ateno e sua boa
vontade.
RESUMO
Na busca por sistemas automticos de superviso e controle de grupos
geradores a diesel, aqui apresentado um estudo e desenvolvimento de um mdulo
de superviso e controle, que por meio de um microcontrolador ir gerenciar todo o
funcionamento do sistema.
Este mdulo foi desenvolvido com base em um microcontrolador PIC18F4550
que foi programado em linguagem C, para gerenciar todas as informaes capitadas
do sistema e atuar conforme pr determinado pelo programador, onde o mesmo ir
t recebendo sinais de conversores A/D, que coletam os sinais de todo o sistema
por meio de sensores, tais como: temperatura da gua de refrigerao, de presso
do lubrificante, de nvel do lquido de refrigerao e do combustvel, de ruptura da
correia, de tenso da concessionria e do grupo gerador, de velocidade de rotao
do grupo gerador, entre outros, que dependendo da necessidade possam ser
instalados.
De posse de todas essas informaes o microcontrolador ir gerenciar todo o
funcionamento do sistema de gerao de energia eltrica por meio de grupos
geradores a diesel.
Palavras-chave: Gerenciamento; Grupos geradores a Diesel; Microcontrolador
Conversor A/D
ABSTRACT
In pursuit of automatic systems for supervision and control of diesel generator
sets, here is presented a study and development of a supervisory control module,
which by means of a microcontroller will manage the overall operation of the system.
This module was developed based on a PIC18F4550 microcontroller which is
programmed in C language to manage all information capitate system and act as
predetermined by the programmer, where it will're receiving signals from A / D
converters, which collect signals the entire system by means of sensors, such as
temperature of cooling water, lubricant pressure, the level of coolant and fuel, the belt
breaking, the utility voltage and the generator, speed rotation of the generator,
among others, depending on the need to be installed.
In possession of all this information the microcontroller will manage the entire
operation of power generation by diesel generators.
Keywords:
A / D Converter
Management;
diesel
generating
sets;
Microcontroller;
10
LISTA DE FIGURAS
FIGRUA 01 Grupo Gerador a Diesel do TECA III................................................ 18
FIGURA 02 Motor a Diesel Estacionrio Industrial do TECA III............................ 19
FIGURA 03 Alternador Weg 500KVA.............................................................. 19
FIGURA 04 Funcionamento de um Gerador Elementar.................................. 20
FIGURA 05 Funcionamento de um Gerador Elementar.................................. 20
FIGURA 06 Forma de Onda de um Gerador................................................... 21
FIGURA 07 Governador Mecnico. 25
FIGURA 08 Governador Eletrnico W OODW ARD.. 26
FIGURA 09 Governador Eletrnico CUMMINS ....................................... 26
FIGURA 10 Governador Eletrnico Digital ........................................... 27
FIGURA 11 Sistema de Controle ............................ 28
FIGURA 12 Sistema de Controle de Velocidade de um Grupo Gerador......... 28
FIGURA 13 Painel Local de Instrumentos....................................................... 34
FIGURA 14 Unidade de Memria ................................................................... 38
FIGURA 15 Unidade Central de Processamento ........................................... 39
FIGURA 16 Sistema de Bus entre Memria e CPU........................................ 40
FIGURA 17 Unidade de entrada/sada (I/O) ..........
40
FIGURA 18 Unidade de Srie.......................................................................... 42
FIGURA 19 Unidade de Temporizao........................................................... 42
FIGURA 20 Watchdog..................................................................................... 43
FIGURA 21 Conversor A/D............................................................................. 44
FIGURA 22 Microcontrolador Internamente.................................................... 44
FIGURA 23 Esquema de um Microcontrolador............................................... 45
FIGURA 24 Pinagem do PIC18F4550.............................................................. 46
FIGURA 25 Acoplador ptico.......................................................................... 48
FIGURA 26 Fluxograma do Projeto.................................................................. 52
FIGURA 27 Circuito de entrada do microcontrolador....................................... 57
FIGURA 28 Circuito de sada do microcontrolador.......................................... 58
FIGURA 29 Foto do prottipo .......................................................................... 58
11
LISTA DE TABELAS
TABELA 01 Capacidade de isolao do acoplador........................................
51
TABELA 02
Datasheet de componente.........................................................
56
TABELA 03
Datasheet de componente.........................................................
57
GRAFICOS
GRAFICO 01
Funo do Sistema de Controle de RPM (PID)...................
28
GRAFICO 02
Variao de RPM em Funo de Carga........
29
12
SUMRIO
1 INTRODUO. ....................................................................... 14
1.1 PROBLEMA. ........................................................................ 15
1.2 OBJETIVOS.......................................................................... 15
1.2.1 Objetivo Geral............................................................ 15
1.2.2 Objetivos Especficos................................................. 15
1.3 JUSTIFICATIVA...................................................................................... 15
1.4 RELEVNCIA.......................................................................................... 17
2 FUNDAMENTOS TERICOS................................................................... 17
2.1 Grupo Gerador a Diesel........................................................ 17
2.2 Motores a Diesel................................................................... 18
2.3 Alternador................................................................................................ 19
2.3.1 Tipos de alternadores................................................................... 21
2.3.1.1 Alternadores Industriais................. 21
2.3.1.2 Alternadores Navais.............................. 21
2.3.1.3 Alternadores Marinizados.......................................................... 21
2.3.1.4 Alternadores para Telecomunicaes..................... 22
2.3.1.5 Alternadores a prova de exploso...................... 22
2.3.2 Distino por nmeros de fases do alternador......................... 22
2.3.2.1 Alternadores monofsicos.......................................... 22
2.3.2.2 Alternadores trifsicos............................................. 22
2.3.3 Limitaes.................................................................................... 23
2.4 Regulao de Velocidade..................................................... 23
2.4.1 Governadores mecnicos.......................................... 24
2.4.2 Governadores hidrulicos.......................................... 25
2.4.3 Governadores eletrnicos.......................................... 25
2.4.4 Governadores Digitais.............................................................. 26
2.4.5 Caractersticas de regulao da velocidade.............. 28
2.5 Sistemas de Automao de grupos geradores....................................... 29
2.5.1 Componentes de Superviso e Controle..................................... 32
2.5.1.1 Pressostato do leo lubrificante............................................
32
2.5.1.2 Termostato para a gua de refrigerao................................... 33
13
2.5.1.3 Sensorde sobrevelocidade........................................................ 33
2.5.1.4 Sensor de nvel do lquido de refrigerao................................ 33
2.5.1.5 Rel taquimtrico...................................................................... 33
2.5.1.6 Sensor de ruptura da correia..................................................... 33
2.5.1.7 Sensor de freqncia............................................................... 34
2.5.1.8 Sensores de tenso da rede e do grupo.................................. 34
2.5.1.9 Painel local de instrumentos.................................................... 34
3 MICROCONTROLADOR.........................................................................
35
3.1 Histrico.................................................................................................. 35
3.2 Microcontroladores versus Microprocessadores........... 37
3.3 Unidade de Memria............. 38
3.4 Unidade Central de Processamento............... 39
3.5 Barramentos................................................. 39
3.6 Unidade de Entrada e Sadas (I/O)......................................................... 40
3.7 Comunicao Serial......................................... 41
3.8 Timer........................................................ 42
3.9 Watchdog...................
43
3.10 Conversor Analgico Digital.................... 44
3.11 Caractersticas gerais do PIC18F4550....................................... 45
3.12 Programa............................................................................................... 46
3.13 Acopladores pticos.......................................................................... 48
3.13.1 Resistencia de Isolao..................................................................... 49
3.13.2 Capacitncia de Isolao................................................................... 50
3.13.2 Tenso de Isolao............................................................................ 50
4 METODOLOGIA DO PROJETO................................................................ 51
4.1 Determinando um mtodo...................................................................... 51
4.2 Fluxograma............................................................................................. 52
4.2.1 Reconhecimento da necessidade................................................ 53
4.2.2 Coleta de dados........................................................................... 53
4.2.3 Anlise de dados.......................................................................... 53
4.2.4 Definio do problema................................................................. 54
4.2.5 Definio de uma proposta de soluo........................................ 54
4.2.5.1 Modos de funcionamento do mdulo aqui apresentado........... 54
14
5 DESENVOLVIMENTO DO MODULO DE SUPERVISO E CONTROLE 54
5.1 Montagem do Prottipo........................................................................... 55
5.1.1 Funcionamento do prottipo... 60
6RESULTADOS ........................................................................................... 61
CONCLUSO.................................................................................................. 62
BIBLIOGRAFIA............................................................................................... 63
15
1 - INTRODUO
Este projeto foi idealizado como sugesto para solucionar um problema
encontrado na Unidade de Superviso de Corrente Alternada (USCA) dos grupos
geradores da subestao do terminal de cargas do aeroporto internacional Eduardo
Gomes (TECA III), observando que este equipamento possui o mdulo de controle
automtico RGK 60 da Lovato Eletric, porm, como o este, est apresentando
problemas eletrnicos que esto ocasionando falhas no gerenciamento de partida e
parada do grupo gerador, foi analisado a possibilidade de substituio deste mdulo
por um que atendesse todas as necessidades existentes do sistema. Aps uma
analise detalhada de todos os parmetros que o RGK 60 supervisiona e controlado
no sistema, foi concludo que poderia ser implantado um mdulo de controle
construdo com base no microcontrolador PIC18F4550, onde este ir suprir todas as
funes que o mdulo anterior desempenhava e com total confiabilidade.
A instalao do mdulo aqui apresentado ir proporcionar a soluo de todos
os problemas encontrados no sistema.
16
1.1 - Problema
Devido a falhas eletrnicas no mdulo de controle automtico RGK 60, o
mesmo est reconhecendo erros inexistentes no momento em que o grupo gerador
entra em funcionamento, fazendo que com isso o sistema venha a entra no status de
reset, observando que s retorna a trabalha normalmente aps ser resetado e as
portas onde o mdulo reconhece os erros, serem desativadas, desta forma o
sistema funciona manualmente e perde algumas caractersticas de protees,
observando que devido esses erros so geradas falhas, entre elas podem ser
citadas:
Falha no gerenciamento de partida e parada do grupo;
Falha nas leituras de superviso das grandezas geradas pelo grupo gerador;
Falha no gerenciamento de abertura e fechamento da chave de grupo que
alimenta a carga;
Observando uma mdia de no mnimo 4 oscilaes
semanais no
fornecimento da concessionria, tendo em vista estas oscilaes ocorrem
principalmente no horrio de pico que vai das 18:00 horas as 19:30, intervalo esse
que de grande importncia o bom funcionamento do sistema de emergncia que
alimentado pelo grupo gerador.
1.2 - Objetivos
1.2.1 - Objetivo Geral
Projetar e Construir um mdulo de superviso e controle com base no
microcontrolador PIC18F4550, programado com a linguagem C, para substituir o
mdulo de superviso e controle (RGK 60) da USCA do TECA III do aeroporto
internacional de Manaus.
1.2.2 - Objetivos Especficos
Supervisionar tenso da rede da concessionria;
Supervisionar a frequncia da rede da concessionria;
Supervisionar a tenso gerada pelo grupo gerador;
Supervisionar a frequncia gerada pelo grupo gerador;
17
Supervisionar as condies necessrias para que o grupo gerador
trabalhe normalmente como: presso do leo lubrificante, temperatura
da gua de refrigerao, nvel de combustvel;
Gerenciar a abertura e o fechamento da chave que liga a rede da
concessionria carga;
Gerencia a abertura e fechamento da chave do grupo gerador carga;
Gerenciar partida e parada do grupo gerador;
Gerencia a parada de emergncia de todo o sistema;
Isolar eletricamente o PIC do sinal de entrada;
Aumenta a capacidade de conduo de corrente eltrica das sadas do
mdulo;
Evitar ao mximo contato direto do operador com grupo gerador;
Aprimorar os conhecimentos em sistemas de superviso e controle de
grupos geradores;
Aprender a desenvolver projetos com base em microcontroladores,
especificamente o PIC184550;
Aprender a programa microcontroladores na linguagem C.
1.3- Justificativa
Na situao financeira atual do mundo, a grande ordem de economizar, pois
o futuro inserto. Em vista deste pensamento, o mercado obriga os engenheiros a
pensar no de forma compacta e sim de uma forma dinmica para que possam
alcanar o xito de seus projetos com um custo mais reduzido possvel, porm, sem
deixar de lado a qualidade e a segurana.
Da pode ser afirmado que, aqui no se est inovando e sim, adaptando-se ao
contexto atual, pois, hoje pode ser encontrado varias empresas que oferecem
sistemas que fazem o que aqui est sendo proposto, porm, se for comparado
custos de aquisio e manuteno chega-se a concluso de que; com um bom
estudo das necessidades do sistema que se deseja supervisionar e controlar pode
se chegar a um sistema compatvel com as necessidades do cliente, com um custo
significantemente reduzido em relao aquisio de outros sistemas de controle j
existente no mercado, tendo em vista que este sistema aqui sugerido, no est
limitado como os que so encontrados hoje, ou seja, o cliente que adquirir este
sistema esta com total liberdade para uma futura ampliao do mesmo sem a
18
necessidade de trocar o seu controlador e sim dependendo da situao, apenas
rever as programaes para que sejam atendidas as novas necessidades.
O sistema aqui proposto pode ser instalado tanto em equipamentos que j
possuem controles automticos como o caso desta proposta, assim como em
sistemas semi-automtica ou ainda analgicos.
1.4 - Relevncia
Problemas com energia eltrica algo muito comum em Manaus, devido
forma de gerao da concessionria local e o grande crescimento do consumo
principalmente no plo industrial (PIM), torna muito difcil ter um fornecimento de
energia confivel, fazendo que com isso, determinados consumidores que no
podem ficar sem o fornecimento de energia como o caso de fbricas, hospitais,
condomnios, aeroportos entre outros, sejam obrigados a investir em sistemas de
grupos geradores a diesel comandados automaticamente, tendo em vista a
necessidade de uma rpida realimentao de seus circuitos preferenciais, e sem a
interveno de um operador para realizas as manobras do grupo, da a grande
importncia para sistemas de superviso e controle de grupos geradores.
2 - FUNDAMENTAO TERICA
2.1 - Grupo Gerador a Diesel
De acordo com Pereira (2006), a denominao grupo gerador a diesel dada ao
conjunto composto por um motor a diesel e um gerador de corrente alternada
(alternador), conjunto este, dotado dos componentes de superviso e controle
necessrios ao seu funcionamento autnomo, destinado ao suprimento de energia
eltrica produzida a partir do consumo de leo Diesel.
Devido ao crescimento das grandes cidades, os sistemas de suprimento de
energia
eltrica,
operados
pelas
concessionrias
vm
demonstrando
sua
vulnerabilidade, com oscilaes constantes em seu fornecimento de energia eltrica,
sendo essas por muitas vezes com grandes tempos para se normalizar, com isso
causando prejuzos a diversos setores, alm dos acidentes, que, por serem
imprevisveis, se tornam inevitveis, existem tambm a necessidade das
interrupes para intervenes de manuteno nos diversos equipamentos que
compem os sistemas eltricos. Uma soluo para este problema gerao de
19
energia eltrica para seu prprio consumo, onde entra os grupos geradores para
suprir essa necessidade, seja como fonte principal ou de emergncia.
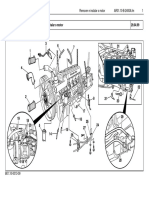
Figura 01 - Grupo gerador a diesel do TECA III
2.2 - Motores a diesel
Pereira
(2006), denomina
como
mquinas trmicas
alternativas,
de
combusto interna, destinadas ao suprimento de energia mecnica ou fora motriz
de acionamento. O nome devido a Rudolf Diesel, engenheiro francs nascido em
Paris, que desenvolveu o primeiro motor em Augsburg - Alemanha, no perodo de
1893 a 1898. Oficialmente, o primeiro teste bem sucedido foi realizado no dia 17 de
fevereiro de 1897, na Maschinenfabrik Augsburg Segundo sua aplicao, so
classificados em 4 tipos bsicos, sendo que aqui ser comentado apenas o
estacionrio, pois o qual se usa em grupo gerador.
Motor Estacionrio destinado aos acionamentos de maquinas estacionarias,
tais como Geradores, maquinas de solda, bombas ou outras maquinas que operem
com rotao constante.
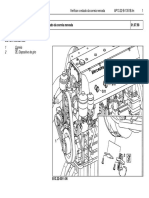
Figura 02 - Motor Diesel Estacionrio Industrial do TECA III
20
2.3 Alternador
Segundo Pereira (2006), alternador o gerador de corrente alternada, assim
como denominamos dnamo ao gerador de corrente contnua. Os geradores so
mquinas destinadas a converter energia mecnica em energia eltrica. A
transformao de energia nos geradores fundamenta-se no princpio fsico
conhecido como Lei de Lenz. Esta lei afirma que quando existe induo magntica,
a direo da fora eletromotriz induzida tal, que o campo magntico dela resultante
tende a parar o movimento que produz a fora eletromotriz.
Figura 03 - Alternador Weg 500KVA
Fonte:<http://catalogo.weg.com.br/files/wegnet/WEG-alternador-sincrono-linha-g-plus-50013799catalogo-portugues-br.pdf>
Os alternadores pertencem categoria das mquinas sncronas, isto ,
mquinas cuja rotao diretamente relacionada ao nmero de plos magnticos e
a freqncia da fora eletromotriz. No h, basicamente, diferenas construtivas
entre um alternador e um motor sncrono, podendo um substituir o outro sem
prejuzo de desempenho. Assim, um alternador quando tem seu eixo acionado por
um motor, produz energia eltrica nos terminais e, ao contrrio, recebendo energia
eltrica nos seus terminais, produz energia mecnica na ponta do eixo, com o
mesmo rendimento.
A induo magntica ocorre sempre que h movimento relativo entre um
condutor e um campo magntico. O gerador elementar, concebido por Michael
Faraday em 1831, na Inglaterra e mais ou menos na mesma poca por Joseph
Henry, nos Estados Unidos, era constitudo por uma espira que girava entre os plos
de um m, semelhante figura:
21
Figura 04 - Funcionamento elementar de um gerador.
Fonte: <http://www.joseclaudio.eng.br/grupos_geradores_6.html>
Figura 05 - Funcionamento de um gerador elementar
Fonte: <http://www.joseclaudio.eng.br/grupos_geradores_6.html>
Figura 06 - Forma de onda gerada pelo grupo gerador.
Fonte: <http://www.joseclaudio.eng.br/grupos_geradores_6.html>
A fora eletromotriz e a corrente de um gerador elementar mudam de direo
cada vez que a espira gira 180. A tenso de sada deste gerador alternada. um
ALTERNADOR.
Mecanicamente, o alternador constitudo por duas partes principais: uma
fixa, que a carcaa, onde se encontram os ps de fixao, e a outra mvel
(girante). A parte fixa chamada de estator e a parte mvel de rotor. Eletricamente,
tambm, so duas partes principais. Uma delas responsvel pelo campo
magntico, onde esto localizados os plos do alternador, que chamamos de campo
(ou indutor). A outra parte onde aparece a fora eletromotriz, a qual chamada de
induzido.
22
2.3.1 - Tipos de alternadores
2.3.1.1 - Alternadores Industriais:
So os chamados de mquinas de linha, destinados a atender a maioria dos
consumidores normais.
2.3.1.2 - Alternadores Navais
So mquinas construdas para uso naval, com todos os componentes
projetados e tratados para resistir corroso marinha.
2.3.1.3 - Alternadores Marinizados
Basicamente so alternadores industriais destinados a servio em reas
agressivas, recebendo ento um tratamento especial em alguns componentes.
2.3.1.4 - Alternadores para Telecomunicaes
So mquinas especiais, com caractersticas determinadas para no causar
interferncia nas telecomunicaes e tambm para atender ao tipo de carga, que
bastante severa. Em geral, os alternadores destinados a atender equipamentos de
telecomunicaes alimentam retificadores de alta capacidade que produzem
deformaes da forma de onda da tenso gerada, o que levado em considerao
no projeto e na construo do alternador especial.
2.3.1.5 - Alternadores a prova de exploso
Destinam-se ao servio em reas saturadas, principalmente petrolferas e
qumicas, onde h risco de materiais inflamveis, sendo totalmente blindados para
impedir que qualquer centelhamento entre em contato com a atmosfera ambiente,
tendo por isso um sistema de refrigerao especial, tipo trocador de calor, de modo
que o ar existente no interior da mquina no transmitido ao exterior.
2.3.2 Distino por nmeros de fases do alternador
Pode-se ainda distinguir os alternadores segundo o nmero de fases, que, no
caso presente, so:
23
2.3.2.1 - Alternadores monofsicos
So aqueles que possuem as bobinas do enrolamento induzido de tal forma
que a tenso de sada obtida em dois pontos terminais.
2.3.2.2 - Alternadores trifsicos
Possuem trs grupos independentes de bobinas, montadas defasadas em
120 entre si, sendo ligadas de tal maneira que podemos ter trs ou quatro pontos
de ligao para os consumidores. Em geral, cada grupo independente de bobinas
tem duas bobinas separadas, para permitir que, com o fechamento das ligaes
externas, se obtenha valores diferentes de tenso, como veremos adiante. O tipo de
fechamento normalmente utilizado o "estrela com neutro acessvel", onde existe
um ponto de ligao para cada fase mais um ponto denominado "neutro", que
constitudo pelo fechamento das extremidades das bobinas. A tenso entre os trs
pontos terminais de cada fase sempre a mesma, que deve corresponder ao tipo de
fechamento escolhido. A tenso medida entre cada fase e o neutro menor, sendo,
numericamente, igual ao valor da tenso entre fases dividida pela raiz quadrada de
3. O neutro para ser ligado ao aterramento da instalao eltrica local.
No sistema trifsico ligado a carga equilibrada no deve haver circulao de
corrente pelo condutor neutro, o que na prtica resulta muito difcil, razo pela qual,
os alternadores chamados industriais so construdos para suportar um desequilbrio
de carga entre fases, mximo de 15%, valor que no deve ser excedido, pois alm
de provocar funcionamento irregular e diferenas de tenso entre fases, pode
danificar o alternador.
2.3.3 - Limitaes
O que limita a potncia do alternador a temperatura alcanada pelo
enrolamento do induzido. Por isso, so mquinas que sofrem perdas por
aquecimento, que pode resultar da temperatura ambiente ou da altitude. Os
alternadores de linha normal de produo so fabricados para operar com
temperatura ambiente mxima de 40C e altitude de 1.000 m acima do nvel do mar.
Para servio em condies mais adversas, necessrio corrigir para menos a
potncia do alternador.
24
2.4 - Regulao da velocidade
Pereira (2006), afirma que a rotao de trabalho do motor Diesel depende da
quantidade de combustvel injetada e da carga aplicada rvore de manivelas
(potncia fornecida mquina acionada). Tambm necessrio limitar a rotao
mxima de trabalho do motor, em funo da velocidade mdia do pisto, que no
deve induzir esforos que superem os limites de resistncia dos materiais, bem
como da velocidade de abertura e fechamento das vlvulas de admisso e
escapamento, que a partir de determinados valores de rotao do motor, comeam
a produzir efeitos indesejveis. Nas altas velocidades, comea haver dificuldade no
enchimento dos cilindros, devido ao aumento das perdas de carga e a inrcia da
massa de ar, fazendo cair o rendimento volumtrico.
Como a quantidade de combustvel injetada dosada pela bomba injetora,
por meio da variao de dbito controlada pelo mecanismo de acelerao, limita-se
a quantidade mxima de combustvel que pode ser injetada. Dependendo do tipo de
motor, essa limitao feita por um batente do acelerador, que no permite acelerar
o motor alm daquele ponto. O mecanismo de acelerao, por si s, no capaz de
controlar a rotao do motor quando ela tende a cair com o aumento da carga ou a
aumentar com a reduo da mesma carga. necessrio ento outro dispositivo que
assegure controle da dosagem de combustvel em funo das solicitaes da carga.
Na maioria dos motores, este dispositivo constitudo por um conjunto de
contrapesos girantes, que por ao da fora centrfuga, atua no mecanismo de
acelerao de modo a permitir o suprimento de combustvel sem variaes bruscas
e respondendo de forma suave s solicitaes da carga. Conhecidos como
reguladores ou governadores de rotaes, so utilizados em todos os motores
Diesel e, dependendo da aplicao, como visto no incio deste trabalho, tem
caractersticas distintas e bem definidas. No caso especfico dos motores para
grupos Diesel-geradores, a regulao da velocidade um item particularmente
crtico, uma vez que a freqncia da tenso gerada no alternador necessita ser
mantida constante, ou seja, o motor Diesel deve operar em rotao constante,
independente das solicitaes da carga. Isto significa que a cada aparelho eltrico
que se liga ou desliga, o governador deve corrigir a quantidade de combustvel
injetada, sem permitir variaes da RPM, o que quase impossvel, dado o tempo
25
necessrio para que as correes se efetivem. Para solucionar o problema, existem
trs tipos bsicos de governadores iscronos, que so:
2.4.1 - Governadores mecnicos:
Constitudos por um sistema de contrapesos, molas e articulaes, atuam no
mecanismo de acelerao aumentando ou diminuindo o dbito de combustvel
sempre que a rotao se afasta do valor regulado, em geral, 1800 RPM. Tem tempo
de resposta considerado longo e permitem oscilaes em torno do valor regulado.
Dependendo da carga que for aplicada bruscamente, permitem quedas acentuadas
da RPM e, na recuperao, permitem ultrapassar o valor regulado para, em seguida,
efetuar nova correo de menor grau. So mais baratos e utilizados em grupos
Diesel-geradores que alimentam equipamentos pouco sensveis s variaes de
freqncia. Tem preciso de regulao em torno de 3%, podendo chegar at 1,5%.
O tipo mais comum, utilizado em grande nmero de motores equipados com bombas
injetores Bosch em linha, o governador Bosch modelo RSV.
Figura 07 - Governador mecnico
Fonte:<http://www.joseclaudio.eng.br/grupos_geradores_3.html>
2.4.2 - Governadores hidrulicos
De maior preciso que os governadores mecnicos, podem ser acionados
pelo motor Diesel independentemente da bomba injetora e atuam sobre a alavanca
de acelerao da bomba, exercendo a funo que seria do pedal do acelerador do
veculo. So constitudos por um sistema de contrapesos girantes, que fazem o
papel de sensor de rotao e uma pequena bomba hidrulica para produzir a
presso de leo necessria ao acionamento. As variaes de rotao "sentidas"
pelos contrapesos so transformadas em vazo e presso de leo para alimentar
26
um pequeno cilindro ligado haste de acelerao da bomba. Por serem caros e
necessitarem de um arranjo especial para montagem no motor, so pouco utilizados.
O modelo mais conhecido em uso no Brasil o Woodward PSG.
2.4.3 - Governadores eletrnicos
Atualmente esto sendo utilizados em maior escala, dado o custo, que vem
se reduzindo nos ltimos anos. Oferecem a melhor preciso de regulao que se
pode conseguir e so constitudos por trs elementos bsicos::
1) Pick-up magntico, que exerce a funo de sensor de RPM;
2) Regulador eletrnico, propriamente dito (ou unidade de controle) e
3) Atuador.
A construo pode variar, conforme o fabricante, mas todos funcionam
segundo os mesmos princpios. O pick-up magntico uma bobina enrolada sobre
um ncleo ferromagntico e instalado na carcaa do volante, com a proximidade
adequada dos dentes da cremalheira. Com o motor em funcionamento, cada dente
da cremalheira, ao passar prximo ao pick-up magntico, induz um pulso de
corrente eltrica que captado pelo regulador. A quantidade de pulsos por segundo
(freqncia) comparada, pelo regulador, com o valor padro ajustado. Se houver
diferena, o regulador altera o fluxo de corrente enviada para o atuador, que efetua
as correes do dbito de combustvel, para mais ou para menos, conforme
necessidade. H atuadores que trabalham ligados haste de acelerao da bomba
injetora, como nos governadores hidrulicos e outros que so instalados no interior
da bomba e atuam diretamente sobre o fluxo de combustvel. Os atuadores externos
mais conhecidos so os fabricados pela Woodward, (governadores modelo EPG) e
os internos so os utilizados nos motores Cummins (governador EFC).
27
Figura 08 - Governador Eletrnico
Figura 09 - Governador Eletrnico CUMMINS EFC
Fonte: http://www.joseclaudio.eng.br/grupos_geradores_3.html
2.4.4 - Governadores Digitais:
Os governadores digitais utilizados atualmente, embora possam oferecer
recurso de comunicao via porta serial e funes de controle PID (Proporcional
Integral Derivativa), dependem de um atuador analgico para comandar as
correes de RPM do motor, o que os torna iguais, em termos de resultados, aos
governadores eletrnicos analgicos.
Woodward 2301D Load Sharing and Speed
Figura 10 - Governador Eletrnico Digital
Fonte: <http://www.joseclaudio.eng.br/grupos_geradores_3.html>
Nos grupos geradores, assim como em outras aplicaes, a variao de RPM
funo da variao da carga e o tempo de correo tambm proporcional
intensidade da mesma variao. No caso do veculo que sobe uma ladeira, o
motorista aciona o pedal do acelerador para manter a rotao e vencer a subida.
Nos grupos geradores, quem aciona o acelerador o governador de rotaes.
Os governadores so ditos iscronos quando asseguram rotao constante
entre vazio e em plena carga, corrigindo no menor tempo possvel as variaes de
RPM. Por mais iscronos que possam ser no podem corrigir instantaneamente as
28
variaes de rotao do motor, devido inrcia natural do sistema. necessrio,
primeiro, constatar que houve uma variao de RPM para, em seguida, efetuar a
correo.
O tempo de resposta ajustado at um limite mnimo, a partir do qual o
funcionamento do motor se torna instvel, por excesso de sensibilidade. Neste
ponto, necessrio retroceder um pouco at que a rotao se estabilize. Uma vez
obtido o melhor tempo de resposta, a quantidade de RPM que pode variar dentro
deste tempo depende da solicitao da carga. Uma grande variao brusca na carga
induz uma variao proporcional da RPM. Alm da sensibilidade, necessrio
ajustar o valor mximo que se pode permitir de queda ou de aumento de RPM, entre
vazio e em plena carga, que nem sempre pode ser zero RPM. Esta variao
conhecida como droop e necessria, especialmente para grupos geradores que
operam em paralelo (mais de um grupo Diesel-gerador alimentando a mesma
carga).
Todos os governadores de rotao, atualmente, ajustam a quantidade de
combustvel por meios mecnicos. Utiliza-se sempre um dispositivo atuador, que nos
governadores eletrnicos acionado eletricamente, para fazer variar a quantidade
de combustvel injetada e corrigir a rotao para o valor nominal.
2.4.5 Caractersticas de regulao da velocidade
O problema de manter constante a velocidade do motor o mesmo de
qualquer sistema submetido a um controle para correo..
Figura 11 Sistema de controle
Fonte: <http://www.joseclaudio.eng.br/grupos_geradores_3.html>
No grupo gerador, teramos:
Figura 12 Sistema de controle de um grupo gerador
Fonte: <http://www.joseclaudio.eng.br/grupos_geradores_3.html>
29
Com reguladores ou governadores ditos proporcionais, as correes das
variaes acontecem de forma semelhante curva mostrada na figura abaixo
Grafico 1 :Funo do sistema de controle de RPM (PID)
Fonte: <http://www.joseclaudio.eng.br/grupos_geradores_3.html>
DROOP:
a variao percentual entre as velocidades nominal em vazio e a final, com
aplicao de 100% de carga. = (RPMnom RPMfin) / RPMnom
Grfico 2: Variao de RPM em funo da carga
Fonte: <http://www.joseclaudio.eng.br/grupos_geradores_3.html>
Rotao nominal em vazio: 1800 RPM
Com 100% de carga: 1740 RPM
Droop = (1800 1740) / 1800 = 0,0333.... ou 3,3%
Para os motores das prximas geraes, no sero mais necessrios
governadores de rotaes, uma vez que bastar programar a ECU do sistema de
injeo eletrnica para operar em rotao constante sob qualquer condio de carga
ou com o droop desejado.
2.5 Sistemas de Automao de Grupos Geradores
De acordo com Pereira (2006), o mercado brasileiro no era receptivo aos
controles eletrnicos para grupos geradores at o advento da tecnologia digital neste
segmento. Havia um entendimento geral de que os controles para grupos geradores
deveriam ser simples de operar e oferecer o mximo em termos de facilidades de
30
manuteno. As inovaes eletrnicas introduzidas pelos fabricantes eram limitadas,
j que a maior parcela do volume das suas vendas era gerada por encomendas sob
especificao, as quais recusavam componentes desconhecidos. Os montadores,
buscando maior competitividade, ofereciam muitas alternativas, resultando da que
os
clientes,
usurios
de
muitos
equipamentos,
como
as
empresas
de
telecomunicaes e outros, no conseguiam um nvel de padronizao aceitvel
para os seus equipamentos, como ainda ocorre atualmente. Na dcada de 70,
comearam a surgir os primeiros controles eletrnicos montados no Brasil e como
havia a proteo de mercado para a indstria nacional, praticamente nenhuma
tecnologia importada era acrescentada aos produtos vendidos na poca. Alm disso,
as primeiras unidades lanadas no mercado apresentavam desempenho medocre e
falhas constantes, acabando por cair no descrdito do consumidor. Existia ainda
uma certa rejeio por parte das empresas de telecomunicaes que, como maiores
usurios de grupos geradores, eram formadoras de opinio, tornando os controles
eletrnicos aceitveis por outros clientes apenas em funo de preo, uma vez que
eram mais baratos. A despeito disso, muitas unidades foram vendidas e ainda esto
em operao at hoje.
Somente em 1996 os controles eletrnicos para grupos geradores alcanaram
o segmento de telecomunicaes, quando a Embratel adquiriu a sua primeira
Unidade de Superviso de Corrente Alternada eletrnica, fabricadas sob encomenda
e com a superviso dos engenheiros do Departamento de Energia da Embratel,
resultando da o equipamento padro Telebrs.
As empresas de telecomunicaes, diante da diversidade de produtos
existentes no mercado, e com o objetivo de padronizar os grupos geradores
utilizados por elas, elaboraram normas tcnicas especficas para serem observadas
pelos seus fornecedores, nascendo da algumas nomenclaturas hoje bastante
difundidas entre os usurios de grupos geradores, tais como:
USCA = Unidade de Superviso de Corrente alternada
QTM = Quadro de Transferncia Manual
QTA = Quadro de transferncia Automtica
QGD = Quadro Geral de Distribuio
QDCA = Quadro de Distribuio de Corrente Alternada
Conceitualmente, h diferenas entre as prticas adotadas nos mercado
americano e europeu. Ns, no Brasil, assimilamos os padres europeus com maior
31
facilidade, provavelmente porque as nossas normas tcnicas derivam, em muitos
casos, das normas europias e porque somos familiarizados com o sistema mtrico.
Assim, definimos os nossos sistemas em KVA, enquanto nos Estados Unidos, o
padro definir as potncias em kW, independentemente de fator de potncia. Para
ns, o entendimento de que o QUADRO DE COMANDO do grupo gerador um
componente parte a eltrica do sistema. Entendemos que o quadro de comando
deve ser separado, onde todos os dispositivos de superviso e controle so
instalados, distncia do motor Diesel (Padro Telecomunicaes). Na maioria dos
casos, no aceitvel o que se denomina de QUADRO DE COMANDO
INTEGRADO ou INCORPORADO, conceito j h muito difundido nos Estados
Unidos e Europa.
Decorrente da prtica ao longo do tempo, para a maioria dos usurios,
QUADRO DE COMANDO AUTOMTICO ou USCA, inclui a Chave de Transferncia
Automtica de Carga. Somente em casos excepcionais, em funo das distncias
envolvidas na instalao, visando a economia de cabos, admite-se a utilizao de
QTA (Quadro de Transferncia Automtica) distncia, em separado da USCA.
A grande maioria das especificaes tcnicas elaboradas pelas empresas de
engenharia para aquisio de grupos geradores prev a utilizao de um nico
quadro de comando auto-suportado, onde se encontram controles, instrumentos e
chave de transferncia automtica. Somente a partir do advento dos controles
digitais observa-se a tendncia de mudana destes conceitos. Por entender que esta
tecnologia mais confivel, o consumidor tende aceitar mais facilmente o Quadro
de Comando Integrado. H, ainda, a dificuldade de aceitao do fato de alguns
dispositivos serem inerentes exclusivamente Chave de Transferncia (em armrio
distncia), como os sensores de tenso e freqncia, por exemplo. Portanto, o
conceito de montagem dos grupos geradores importados ainda encontra algumas
resistncias no mercado brasileiro, resultantes de prticas enraizadas no passado.
de ressaltar, tambm, que durante muitos anos, os grupos geradores, na
sua maioria, eram fornecidos sob encomenda fazendo com que os montadores no
pudessem manter um padro construtivo. Os produtos considerados de linha no
correspondiam exatamente s exigncias dos clientes. Ainda hoje, freqentemente,
vemos especificaes tcnicas que s podem ser atendidas com produtos
fabricados especialmente, sob encomenda. So os que os fabricantes/montadores
chamam de grupos geradores engenheirados, que alguns at declinam de
32
fornecer, por inclurem dispositivos pouco usuais e documentao tcnica especfica
e complicada.
Outra caracterstica do mercado brasileiro, em relao a controles, est
diretamente relacionada ao conhecimento tcnico do produto por parte do
comprador/usurio. H uma parcela significativa de usurios, onde se concentra o
maior volume de unidades vendidas (potncias inferior a 500 KVA), que adquire pelo
menor preo, sem diferenciar o produto. O comprador/usurio no distingue entre
este ou aquele tipo de controle, marca ou modelo de motor Diesel e alternador. Para
atender estes clientes, so fabricados os alternadores industriais, com excitao
esttica e sem preocupaes tcnicas quanto distoro harmnica, forma de onda
e outras caractersticas. Todos os componentes utilizados so os de menores custos
possveis.
Em outro segmento esto os clientes que tem algum conhecimento tcnico ou
se assessoram de consultores para fazer aquisio e instalao do seu grupo
gerador, identificando suas reais necessidades e adquirindo a soluo para o seu
problema de energia e no somente um grupo gerador. Nestes casos, h uma
especificao tcnica, com requisitos mnimos a serem atendidos pelo fornecedor do
equipamento. Atualmente, podem ser encontrados, no mercado brasileiro, diversos
tipos de controles para os grupos geradores comercializados. Entre os quais, podem
ser destacados os seguintes:
o RGK 60 LOVATO;
o Detector e PowerCommand Cummins Power Generation;
o EMCP II e EMCP II+ - Caterpillar;
o DEC340 Decision Maker Kohler;
o ST2000 Stemac;
o SMART GEN Atos Automao Industrial
o LSM2001 Light Service;
o M50, M150, S2500, R3000, A400 e MICS Process II SDMO;
o RGAM LOVATO;
o USCAMAQ Maquigeral;
o DPC-560 Leon Heimer;
o MCSD Atlas Copco e
o K30 Genset KVA Automao.
33
2.5.1 - Componentes de Superviso e Controle
Os grupos Diesel/geradores automticos trabalham sem superviso constante
dos operadores, fornecendo energia eltrica aos consumidores e automaticamente
corrigindo por meio de sistemas de controle a tenso e a freqncia fornecidas.
Sendo que para regime proteo grupos geradores so dotados de sensores que,
dependendo das especificaes do cliente, incluem:
2.5.1.1 - Pressostato do leo lubrificante
Tem a finalidade comandar a parada do motor Diesel quando a presso do
leo lubrificante cai abaixo de um valor predeterminado. Em algumas aplicaes,
utilizam-se dois pressostatos (ou sensores de presso) sendo um para alarme,
quando a presso do leo atinge determinado valor e o outro para comandar a
parada, calibrado para um valor imediatamente abaixo, sendo que o mesmo no
sistema e um sensor discreto, onde informa apenas o estado aberto ou fechado;
2.5.1.2 - Termostato para a gua de refrigerao:
Com funo idntica acima, tambm, em algumas aplicaes, so utilizados
dois sensores, para atuarem quando a temperatura do meio refrigerante ultrapassar
valores predeterminados, sendo que o termostato mecnico ir por meio de contatos
apenas se o estado fechado ou aberto.
2.5.1.3 - Sensor de sobrevelocidade:
Para comandar a parada do motor Diesel quando a velocidade de rotao
ultrapassa valores predeterminados, (geralmente 20% acima da rotao nominal).
Em algumas aplicaes, onde h o risco de aspirao de gases inflamveis, o
sensor de sobrevelocidade interligado a um dispositivo de corte do ar de
admisso, para parar o motor por abafamento, alm do corte de combustvel.
2.5.1.4 - Sensor de nvel do lquido de refrigerao:
Na maioria dos casos, so utilizados para acionar um dispositivo de alarme,
indicando a necessidade de completar o nvel do sistema de refrigerao;
34
2.5.1.5 - Rel taqumetro:
Tem a finalidade de desligar o motor de partida quando a rotao do motor
Diesel ultrapassa determinado valor, em geral 500 rpm. Em muitos casos, esta
funo tambm inerente ao sensor de sobrevelocidade, quando este permite o
controle de mais que uma faixa de operao. Este dispositivo impede acionar o
motor de partida com o motor funcionando;
2.5.1.6 - Sensor de ruptura da correia:
Em algumas aplicaes, exigido que a parada do motor Diesel seja
comandada antes da temperatura da gua se elevar, no caso de ruptura da correia
da bomba d'gua;
2.5.1.7 - Sensor de frequncia:
Pode ser utilizado para supervisionar tanto a freqncia do grupo gerador
quanto da rede local. Nos grupos geradores equipados com sistema de partida
automtica, comanda o desligamento da rede local e aciona a partida automtica do
grupo gerador, ou vice-versa, comanda a parada do grupo gerador e transfere a
carga para a rede local quando h anormalidade na freqncia do alternador;
2.5.1.8 - Sensores de tenso da rede e do grupo:
Atuam como no caso realizando as leituras da voltagem do sistema,
comandando a partida e parada, conforme o caso.
2.5.1.9 - Painel local de instrumentos:
Para avaliar a desempenho do motor Diesel, um painel de instrumentos
dotado de manmetro para o leo lubrificante, termmetro para o sistema de
refrigerao, chave de partida, comando de parada manual, indicador de carga de
bateria e outros instrumentos tais como voltmetro e ampermetro para a bateria,
tacmetro, termmetro para o leo lubrificante e hormetro, conforme o caso
instalado junto ao motor Diesel. Em algumas aplicaes, componentes do
governador eletrnico de rotaes so tambm instalados no painel local.
35
Figura 13 Painel local de instrumentos do grupo gerador do TECA III
3 - MICROCONTROLADOR
3.1 - Histrico
De acordo com Nebojsa & Dragan (2000), no ano de 1969 que uma equipa de
engenheiros japoneses pertencentes companhia BUSICOM chega aos Estados
Unidos com a encomenda de alguns circuitos integrados para calculadoras a serem
implementados segundo os seus projetos. A proposta foi entregue INTEL e
Marcian Hoff foi o responsvel pela sua concretizao. Como ele tinha tido
experincia de trabalho com um computador (PC) PDP8, lembrou-se de apresentar
uma soluo substancialmente diferente em vez da construo sugerida. Esta
soluo pressupunha que a funo do circuito integrado seria determinada por um
programa nele armazenado. Isso significava que a configurao deveria ser mais
simples, mas tambm era preciso muito mais memria que no caso do projeto
proposto pelos engenheiros japoneses. Depois de algum tempo, embora os
engenheiros japoneses tenham tentado encontrar uma soluo mais fcil, a idia de
Marcian venceu e o primeiro microprocessador nasceu. Ao transformar esta idia
num produto concreto, Frederico Faggin foi de uma grande utilidade para a INTEL.
Ele transferiu-se para a INTEL e, em somente 9 meses, teve sucesso na criao de
um produto real a partir da sua primeira concepo. Em 1971, a INTEL adquiriu os
direitos sobre a venda deste bloco integral. Primeiro eles compraram a licena
companhia BUSICOM que no tinha a mnima percepo do tesouro que possua.
Neste mesmo ano, apareceu no mercado um microprocessador designado por 4004.
Este foi o primeiro microprocessador de 4 bits e tinha a velocidade de 6 000
operaes por segundo.
36
No muito tempo depois, a companhia Americana CTC pediu INTEL e
Texas Instrumentos um microprocessador de 8 bits para usar em terminais. Mesmo
apesar de a CTC acabar por desistir desta idia, tanto a Intel como a Texas
Instrumentos continuaram a trabalhar no microprocessador e, em Abril de 1972, os
primeiros microprocessadores de 8 bits apareceram no mercado com o nome de
8008. Este podia enderear 16KB de memria, possua 45 instrues e tinha a
velocidade de 300 000 operaes por segundo. Esse microprocessador foi o
pioneiro de todos os microprocessadores atuais. A Intel continuou com o
desenvolvimento do produto e, em Abril de 1974 ps c fora um processador de 8
bits com o nome de 8080 com a capacidade de enderear 64KB de memria, com
75 instrues e com preos a comearem em $360.
Outra companhia Americana, a Motorola, apercebeu-se rapidamente do que
estava a acontecer e, assim, ps no mercado um novo microprocessador de 8 bits, o
6800. O construtor chefe foi Chuck Peddle e alm do microprocessador
propriamente dito, a Motorola foi a primeira companhia a fabricar outros perifricos
como os 6820 e 6850. Nesta altura, muitas companhias j se tinham apercebido da
enorme importncia dos microprocessadores e comearam a introduzir os seus
prprios desenvolvimentos. Chuck Peddle deixa a Motorola para entrar para a MOS
Technology e continua a trabalhar intensivamente no desenvolvimento dos
microprocessadores.
Em 1975, na exposio WESCON nos Estados Unidos, ocorreu um
acontecimento crtico na histria dos microprocessadores. A MOS Technology
anunciou que ia pr no mercado microprocessadores 6501 e 6502 ao preo de $25
cada e que podia satisfazer de imediato todas as encomendas. Isto pareceu to
sensacional que muitos pensaram tratar-se de uma espcie de vigarice,
considerando que os competidores vendiam o 8080 e o 6800 a $179 cada. Para
responder a este competidor, tanto a Intel quanto a Motorola, baixaram os seus
preos por microprocessador para $69,95 logo no primeiro dia da exposio.
Rapidamente a Motorola ps uma ao em tribunal contra a MOS Technology
e contra Chuck Peddle por violao dos direitos de autor por copiarem ao copiarem
o 6800. A MOS Technology deixou de fabricar o 6501, mas continuou com o 6502. O
6502 um microprocessador de 8 bits com 56 instrues e uma capacidade de
endereamento de 64KB de memria. Devido ao seu baixo custo, o 6502 torna-se
muito popular e, assim, instalado em computadores como KIM-1, Apple I, Apple II,
37
Atari, Comodore, Acorn, Oric, Galeb, Orao, Ultra e muitos outros. Cedo aparecem
vrios fabricantes do 6502 (Rockwell, Sznertek, GTE, NCR, Ricoh e Comodore
adquiriram a MOS Technology) que, no auge da sua prosperidade, chegou a vender
microprocessadores razo de 15 milhes por ano!
Contudo, os outros no baixaram os braos. Frederico Faggin deixa a Intel e
funda a Zilog Inc.
Em
1976,
Zilog
anuncia
Z80.
Durante
concepo
deste
microprocessador, Faggin toma uma deciso crtica. Sabendo que tinha sido j
desenvolvida uma enorme quantidade de programas para o 8080, Faggin conclui
que muitos vo permanecer fieis a este microprocessador por causa das grandes
despesas que adviriam das alteraes a todos estes programas. Assim, ele decide
que o novo microprocessador deve ser compatvel com o 8080, ou seja, deve ser
capaz de executar todos os programas que j tenham sido escritos para o 8080.
Alm
destas
caractersticas,
outras
caractersticas
adicionais
foram
introduzidas, de tal modo que o Z80 se tornou um microprocessador muito potente
no seu tempo.
Ele podia enderear diretamente 64KB de memria, tinha 176 instrues, um
grande nmero de registros, uma opo para refrescamento de memria RAM
dinmica, uma nica alimentao, maior velocidade de funcionamento, etc. O Z80
tornou-se um grande sucesso e toda a gente se transferiu do 8080 para o Z80.
Pode dizer-se que o Z80 se constituiu sem sombra de dvida como o
microprocessador de 8 bits com maior sucesso no seu tempo. Alm da Zilog, outros
novos fabricantes como Mostek, NEC, SHARP e SGS apareceram. O Z80 foi o
corao de muitos computadores como o Spectrum, Partner, TRS703, Z-3 e Galaxy,
que foram aqui usados.
Em 1976, a Intel apareceu com uma verso melhorada do microprocessador
de 8 bits e designada por 8085. Contudo, o Z80 era to superior a este que, bem
depressa, a Intel perdeu a batalha. Ainda que mais alguns microprocessadores
tenham aparecido no mercado (6809, 2650, SC/MP etc.), j tudo estava ento
decidido. J no havia grandes melhorias a introduzir pelos fabricantes que
fundamentassem a troca por um novo microprocessador, assim, o 6502 e o Z80,
acompanhados
pelo
6800,
mantiveram-se
microprocessadores de 8 bits desse tempo.
como
os
mais
representativos
38
3.2 - Microcontroladores versus Microprocessadores
Nebojsa & Dragan (2000), difere microcontrolador de um microprocessador
em vrios aspectos.
Primeiro e o mais importante, a sua funcionalidade. Para que um
microprocessador possa ser usado, outros componentes devem-lhe ser adicionados,
tais como memria e componentes para receber e enviar dados. Em resumo, isso
significa que o microprocessador o verdadeiro corao do computador. Por outro
lado, o microcontrolador foi projetado para ter tudo num s. Nenhuns outros
componentes externos so necessrios nas aplicaes, uma vez que todos os
perifricos necessrios j esto contidos nele. Assim, ns poupamos tempo e
espao na construo dos dispositivos.
3.3 - Unidade de Memria
Nebojsa
&
Dragan
(2000),
define
memria
como
parte
do
microcontrolador cuja funo guardar dados. A maneira mais fcil de explicar
descrev-la como uma grande prateleira cheia de gavetas. Se supusermos que
marcamos as gavetas de modo a elas no se confundirem umas com as outras,
ento o seu contedo ser facilmente acessvel.
Basta saber a designao da gaveta e o seu contedo ser conhecido.
Figura 14: UNIDADE DE MEMRIA
Fonte: Nebojsa & Dragan, 2000, pg 7.
Os componentes de memria so exatamente a mesma coisa. Para um
determinado endereo, ns obtemos o contedo desse endereo. Dois novos
conceitos foram apresentados: endereamento e memria. A memria o conjunto
de todos os locais de memria (gavetas) e endereamento nada mais que
39
selecionar um deles. Isto significa que precisamos selecionar o endereo desejado
(gaveta) e esperar que o contedo desse endereo nos seja apresentado (abrir a
gaveta). Alm de ler de um local da memria (ler o contedo da gaveta), tambm
possvel escrever num endereo da memria (introduzir um contedo na gaveta).
Isto feito utilizando uma linha adicional chamada linha de controle. Ns iremos
designar esta linha por R/W (read/write - ler/escrever). A linha de controle usada
do seguinte modo: se r/w=1, executada uma operao de leitura, caso contrrio
executada uma operao de escrita no endereo de memria.
A memria o primeiro elemento, mas precisamos de mais alguns para que o
nosso microcontrolador possa trabalhar.
3.4 - Unidade Central de Processamento
Vamos agora adicionar mais 3 locais de memria a um bloco especfico para
que possamos ter as capacidades de multiplicar, dividir, subtrair e mover o seus
contedos de um local de memria para outro. A parte que vamos acrescentar
Nebojsa & Dragan (2000), chamada de "central processing unit" (CPU) ou Unidade
Central de Processamento. Os locais de memria nela contidos chamam-se
registros.
Figura 15:UNIDADE CENTRAL DE PROCESSAMENTO (CPU)
Fonte: Nebojsa & Dragan, 2000, pg 8.
Os registros so, portanto, locais de memria cujo papel ajudar a executar
vrias operaes matemticas ou quaisquer outras operaes com dados, quaisquer
que sejam os locais em que estes se encontrem.
Vamos olhar para a situao atual. Ns temos duas entidades independentes
(memria e CPU) que esto interligadas, deste modo, qualquer troca de dados
retardada bem como a funcionalidade do sistema diminuda. Se, por exemplo, ns
desejarmos adicionar os contedos de dois locais de memria e tornar a guardar o
40
resultado na memria, ns necessitamos de uma ligao entre a memria e o CPU.
Dito mais simplesmente, ns precisamos obter um "caminho" atravs do qual os
dados possam passar de um bloco para outro.
3.5 - Barramentos
De acordo com Nebojsa & Dragan (2000), este "caminho" designa-se por
"bus". Fisicamente ele corresponde a um grupo de 8, 16 ou mais fios. Existem dois
tipos de bus: bus de dados e de endereo. O nmero de linhas do primeiro depende
da quantidade de memria que desejamos enderear e o nmero de linhas do outro
depende da largura da palavra de dados, no nosso caso igual a oito. O primeiro
bus serve para transmitir endereos do CPU para a memria e o segundo para ligar
todos os blocos dentro do microcontrolador.
Figura 16:SISTEMA DE BUS ENTRE MEMRIA E CPU
Fonte: Nebojsa & Dragan, 2000, pg 9.
Neste momento, a funcionalidade j aumentou, mas um novo problema
apareceu: ns temos uma unidade capaz de trabalhar sozinha, mas que no possui
nenhum contacto com o mundo exterior, ou seja, conosco! De modo a remover esta
deficincia, vamos adicionar um bloco que contm vrias localizaes de memria e
que, de um lado, est ligado ao bus de dados e do outro s linhas de sada do
microcontrolador que coincidem com pinos do circuito integrado e que, portanto, ns
podemos ver com os nossos prprios olhos.
3.6 - Unidade de Entrada e Sadas (I/O)
Nebojsa & Dragan (2000), denomina estas localizaes que acabamos de
adicionar, como "portos". Existem vrios tipos de portos: de entrada, de sada e de
entrada/sada. Quando trabalhamos com portos primeiro de tudo necessrio
41
escolher o porto com que queremos trabalhar e, em seguida, enviar ou receber
dados para ou desse porto.
Figura 17:UNIDADE DE ENTRADA/SAIDA (I/O)
Fonte: Nebojsa & Dragan, 2000, pg 9.
Quando se est a trabalhar com ele, o porto funciona como um local de
memria. Qualquer coisa de que se est a ler ou em que se est a escrever e que
possvel identificar facilmente nos pinos do microcontrolador.
3.7 - Comunicao Serial
Anteriormente, Nebojsa & Dragan (2000), tinha acrescentado unidade j
existente a possibilidade de comunicar com o mundo exterior. Contudo, esta
maneira de comunicar tem os seus inconvenientes. Um dos inconvenientes bsicos
o nmero de linhas que necessrio usarmos para transferir dados. E se for
necessrio transferi-los a uma distncia de vrios quilmetros? O nmero de linhas
vezes o nmero de quilmetros no atesta a economia do projeto. Isto leva-nos a ter
que reduzir o nmero de linhas de modo a que a funcionalidade se mantenha.
Suponha que estamos a trabalhar apenas com trs linhas e que uma linha usada
para enviar dados, outra para receber e a terceira usada como linha de referncia
tanto do lado de entrada como do lado da sada. Para que isto trabalhe precisamos
definir as regras para a troca de dados. A este conjunto de regras chama-se
protocolo. Este protocolo deve ser definido com antecedncia de modo que no haja
mal entendidos entre as partes que esto a comunicar entre si. Por exemplo, se um
homem est a falar em francs e o outro em ingls, altamente improvvel que
efetivamente e rapidamente, ambos se entendam. Vamos supor que temos o
seguinte protocolo. A unidade lgica "1" colocada na linha de transmisso at que
a transferncia se inicie. Assim que isto acontece, a linha passa para nvel lgico '0'
durante certo perodo de tempo (que vamos designar por T), assim, do lado da
42
recepo ficamos a saber que existem dados para receber e, o mecanismo de
recepo, vai ativar-se. Regressemos agora ao lado da emisso e comecemos a pr
zeros e uns lgicos na linha de transmisso correspondentes aos bits, primeiro o
menos significativo e finalmente o mais significativo. Vamos esperar que cada bit
permanea na linha durante um perodo de tempo igual a T, e, finalmente, depois do
oitavo bit, vamos pr novamente na linha o nvel lgico "1", o que assinala a
transmisso de um dado. O protocolo que acabamos de descrever designado na
literatura profissional por NRZ (No Retorno a Zero).
Figura 18:UNIDADE DE SRIE
Fonte: Nebojsa & Dragan, 2000, pg 10.
Como ns temos linhas separadas para receber e enviar, possvel receber e
enviar dados (informao) simultaneamente. O bloco que possibilita este tipo de
comunicao designado por bloco de comunicao srie. Ao contrrio da
transmisso em paralelo, aqui os dados movem-se bit aps bit em srie, daqui
provm o nome de comunicao srie. Depois de receber dados ns precisamos ler
e guardar na memria, no caso da transmisso de dados o processo inverso. Os
dados vm da memria atravs do bus para o local de transmisso e dali para a
unidade de recepo de acordo com o protocolo.
3.8 - Timer
Agora que j temos a unidade de comunicao srie implementada, ns
podemos receber e enviar e processar dados.
43
Figura 19:UNIDADE DE TEMPORIZAO
Fonte: Nebojsa & Dragan, 2000, pg 10.
Contudo, para sermos capazes de utilizar isto na indstria precisamos ainda
de mais alguns blocos. Um deles o bloco de temporizao que nos interessa
bastante porque pode dar-nos informaes acerca da hora, durao, protocolo, etc.
A unidade bsica do temporizador um contador que na realidade um
registro cujo contedo aumenta de uma unidade num intervalo de tempo fixo, assim,
anotando o seu valor durante os instantes de tempo T1 e T2 e calculando a sua
diferena, ns ficamos sabendo a quantidade de tempo decorrida. Esta uma parte
muito importante do microcontrolador, cujo domnio vai requerer muita da nossa
ateno. Nebojsa & Dragan (2000)
3.9 - Watchdog
Uma outra coisa que nos vai interessar a fluncia da execuo do programa
pelo microcontrolador durante a sua utilizao. Suponha que como resultado de
qualquer interferncia (que ocorre frequentemente num ambiente industrial), o nosso
microcontrolador pra de executar o programa ou, ainda pior, desata a trabalhar
incorretamente. Nebojsa & Dragan (2000)
Figura 20:WATCHDOG
Fonte: Nebojsa & Dragan, 2000, pg 11.
Claro que, quando isto acontece com um computador, ns simplesmente
carregamos no boto de reset e continuamos a trabalhar. Contudo, no caso do
44
microcontrolador ns no podemos resolver o nosso problema deste modo, porque
no temos boto. Para ultrapassar este obstculo, precisamos introduzir no nosso
modelo um novo bloco chamado watchdog (co de guarda). Este bloco de fato
outro contador que est continuamente a contar e que o nosso programa pe a zero
sempre que executado corretamente. No caso de o programa "encravar", o zero
no vai ser escrito e o contador, por si s, encarregar-se- de fazer o reset do
microcontrolador quando alcanar o seu valor mximo. Isto vai fazer com que o
programa corra de novo e desta vez corretamente. Este um elemento importante
para que qualquer programa se execute fielmente, sem precisar da interveno do
ser humano.
3.10 Conversor Analgico Digital
Nebojsa & Dragan (2000), define como sinais analgicos dos perifricos
aqueles substancialmente diferentes do que o microcontrolador pode entender (zero
e um), eles devem ser convertidos num formato que possa ser compreendido pelo
microcontrolador. Esta tarefa executada por intermdio de um bloco destinado
converso analgico-digital ou com um conversor A/D. Este bloco vai ser
responsvel pela converso de uma informao de valor analgico para um nmero
binrio e pelo seu trajeto atravs do bloco do CPU, de modo a que este o possa
processar de imediato.
Figura 21:CONVERSOR A/D
Fonte: Nebojsa & Dragan, 2000, pg 11.
Neste momento, a configurao do microcontrolador est j terminada, tudo o
que falta introduzi-la dentro de um aparelho eletrnico que poder aceder aos
blocos internos atravs dos pinos deste componente. A figura a seguir, ilustra o
aspecto interno de um microcontrolador.
45
Figura 22:MICROCONTROLADOR INTERNAMENTE
Fonte: Nebojsa & Dragan, 2000, pg 12.
Configurao fsica do interior de um microcontrolador:
As linhas mais finas que partem do centro em direo periferia do
microcontrolador correspondem aos fios que interligam os blocos interiores aos
pinos do envlucro do microcontrolador. O grfico que se segue representa a parte
principal de um microcontrolador.
Figura 23:Esquema de um microcontrolador com os seus elementos bsicos e ligaes internas.
Fonte: Nebojsa & Dragan, 2000, pg 12.
3.11 Caractersticas gerais do PIC18F4550
Segundo Datasheet do PIC18F4550, ele o um microcontrolador da famlia
de 8 bits e ncleo de 14 bits,fabricado pela Microchip Technology. Possui memria
flash de programa de 8192 palavras de 14 bits, memria RAM com 368 bytes e
46
memria EEPROM com 256 bytes. Sua freqncia de operao (clock) vai at
20MHz, resultando em uma velocidade de processamento de 5 MIPS. Seu conjunto
de instrues RISC se compe de 35 instrues. Pode funcionar com alimentao
de controle de 2 a 5,5v. Sua pinagem DIP tem 40 pinos. A figura 25 mostra
detalhadamente a pinagem do PIC18F4550.
Como perifricos ele possui:
Oscilador de cristal de at 20MHz (configurvel via fusel na gravao);
Oscilador interno de 31KHz at 8MHz (configurvel via fusel na gravao);
Interrupes programveis externas;
Pinos para interrupes de mudanas de estados;
Capture/Compare/PWM (CCP) modules;
At 4 PWM para uso em motor de passo;
Comunicao serial SPI e I2C;
Comunicao serial RS232;
At 13 canais de A/D DE 10 bits;
Comparadores analgicos;
Interrupes com prioridades;
Operao de 2 a 5v;
Comunicao USB.
Figura 24 :Pinagem do PIC18F4550
Fonte: <http://www.datasheetcatalog.org/datasheet/microchip/39617a.pdf>
47
3.12 - Programa
Nebojsa & Dragan (2000), denomina como escrever um programa, uma parte
especial do trabalho com microcontroladores e designado por "programao".
Vamos tentar escrever um pequeno programa numa linguagem que seremos ns a
criar e que toda a gente ser capaz de compreender.
INICIO
REGISTO1=LOCAL_DE_ MEMORIA_A
REGISTO2=LOCAL_DE_ MEMORIA_B
PORTO_A=REGISTO1+REGISTO2
FIM
O programa adiciona os contedos de dois locais de memria e coloca a
soma destes contedos no porto A. A primeira linha do programa manda mover o
contedo do local de memria "A" para um dos registros da unidade central de
processamento. Como necessitamos tambm de outra parcela, vamos colocar o
outro contedo noutro registro da unidade central de processamento (CPU). A
instruo seguinte pede ao CPU para adicionar os contedos dos dois registros e
enviar o resultado obtido para o porto A, de modo a que o resultado desta adio
seja visvel para o mundo exterior. Para um problema mais complexo, naturalmente
o programa que o resolve ser maior.
A tarefa de programao pode ser executada em vrias linguagens tais como
o Assembly, C e Basic que so as linguagens normalmente mais usadas. O
Assembly pertence ao grupo das linguagens de baixo nvel que implicam um
trabalho de programao lento, mas que oferece os melhores resultados quando se
pretende poupar espao de memria e aumentar a velocidade de execuo do
programa.
Os programas na linguagem C mais fcil de escrever e de compreender,
mas, tambm, so mais lentos a serem executados que os programas assembly.e
Basic, a mais fcil de todas para se aprender e as suas instrues so
semelhantes maneira de um ser humano se exprimir, mas tal como a linguagem C,
tambm de execuo mais lenta que o assembly. Em qualquer caso, antes que
escolha entre uma destas linguagens, precisa examinar cuidadosamente os
requisitos de velocidade de execuo, de espao de memria a ocupar e o tempo
que vai demorar a fazer o programa em assembly. A linguagem C uma linguagem
de alto nvel e estruturada. Sua sintaxe simples e porttil, isto , pode ser usado o
48
mesmo programa em vrias plataformas. C muito utilizada para a programao de
microcontroladores e tambm tem o poder de interagir com a plataforma em baixo
nvel podendo incluir cdigos em assembly em sua implementao.
A portabilidade uma vantagem para o desenvolvimento de programas em C,
os quais uma vez construdos podem ser usados em varias plataformas e
dificilmente haver modificaes. A migrao destas rotinas para diferentes
plataformas necessita de poucas modificaes no programa, sendo que, essas
modificaes so relacionadas na funcionalidade no suportadas entre as famlias,
ou mudanas na especificao de cada um dos microcontroladores, como o clculo
de tempo dos temporizadores.
Depois de o programa estar escrito, ns necessitamos de introduzir o
microcontrolador num dispositivo e p-lo a trabalhar. Para que isto acontea, ns
precisamos adicionar mais alguns componentes externos. Primeiro temos que dar
vida ao microcontrolador fornecendo-lhe a tenso (a tenso eltrica necessria
para que qualquer instrumento eletrnico funcione) e o oscilador cujo papel
anlogo ao do corao que bate no ser humano. A execuo das instrues do
programa regulada pelas pulsaes do oscilador. Logo que lhe aplicada a
tenso, o microcontrolador executa uma verificao dele prprio, vai para o princpio
do programa e comea a execut-lo. O modo como o dispositivo vai trabalhar
depende de muitos parmetros, os mais importantes dos quais so a competncia
da pessoa que desenvolve o hardware e do programador que, com o seu programa,
deve tirar o mximo do dispositivo.
3.13 Acopladores pticos
Os acopladores pticos ou fotoacopladores so utilizados principalmente em
aplicaes digitais. Recentemente tem sido adotado para aplicaes lineares e
controle direto de tiristores bidirecionais. Um isolador ptico eletrnico contm um
IRED - Infra-Red Emit-ter Diode e um fotodetector em um mesmo bloco.
Estes dispositivos se colocam de tal maneira que a energia irradiada por um
IRED transmitida eficientemente ao detector atravs de um meio dieltrico de
isolao. Este dieltrico esta rodeado de um material opaco, o qual proporciona
proteo contra a luz ambiente.
49
Figura 25: Acoplador ptico
Fonte : <http://www.vargasp.net/download/livros/Automac4.pdf>
No existe nenhuma conexo eltrica entre a entrada e a sada. Dados que
os emissores de Glio-Arsnico e os detectores de silcio no so inter-cambiveis,
qualquer sinal pode atravessar o isolador somente em uma direo. Isto at um grau
determinado pela capacitncia entrada/sada do bloco e suas caractersticas
dieltricas, o dispositivo no responde a sinais de entrada de modo comum,
protegendo deste modo o circuito de entrada do ambiente do circuito de sada.
Algumas aplicaes tpicas dos fotoacopladores so, por exemplo, a
preveno de laos fechados de terra, deslocamento de nveis de corrente contnua
e controle lgico de circuitos de potncia. A capacidade de isolamento de um
fotoacoplador de transferir eficientemente o sinal desejado definida como (CTR Currente Transfer Ratio - Relao de transferncia de corrente).
Esta relao depende da eficincia radiativa, da distncia entre o IRED e o
detector, da rea de superfcie e a sensibilidade do detector e o ganho de
amplificao do mesmo.
A relao de transferncia afetada por fatores no lineares (corrente, tenso
e temperatura) em ambos os circuitos integrados. Isto traz como conseqncia uma
funo de transferncia muito complexa, funo esta que deve ser determinada de
forma bastante precisa a menos de condies no especificadas.
A capacidade de um isolador de proporcionar proteo de isolamento
geralmente expressa em termos de sobretenso transitria de isolao.
De resto, esta sobretenso a medida da solidez da cpsula e da rigidez
dieltrica dos materiais isolantes. Os 3 parmetros crticos de isolao so:
resistncia de isolao, capacitncia de isolao e rigidez dieltrica. Esses trs
valores so especificados para os terminais de entrada e sada em curto-circuito.
Esse curto-circuito impede possveis danos ao emissor e ao detector, causados
50
pelas correntes capacitivas de carga que circulam nas tenses de prova
relativamente altas.[http://www.vargasp.net/download/livros/Automac4.pdf]
3.13.1 - Resistncia de Isolao
a resistncia de corrente contnua medida desde a entrada at a sada do
acoplador. Em geral os acopladores respondem as especificaes que determinam
11
uma resistncia de isolao mnima de 10 .
Este valor supera a resistncia prevista entre os assentos da montagem de
muitas placas de circuito impresso sobre as quais pode ser montado o acoplador.
Uma elevada tenso de esforo do dieltrico mais as fugas da placa de
circuito impresso podem produzir correntes de ordem at centenas de A.
Estas corrente so de mesma magnitude que as correntes fotodidicas
geradas em um acoplador Darlington tpico, encapsulado em linha dupla de pastilha
(DIP) com correntes de IRED de at 0,5 mA.
E podem chegar a criar dificuldades em aplicaes que requerem baixas
correntes. Tomando cuidado na seleo e processamento da placa de circuito
impresso geralmente os problemas com isolao se reduzem a um mnimo..
[http://www.vargasp.net/download/livros/Automac4.pdf]
3.13.2 - Capacitncia de Isolao:
a capacitncia parasita atravs do dieltrico desde a entrada at a sada.
Os valores tpicos oscilam entre 1 e 2,5 pF. Essa capacitncia pode produzir
efeitos notveis, em circuitos nos quais o dieltrico submetido a oscilaes que
excedam os 500 V/S.
Alguns exemplos disto so os circuitos sensveis a baixos nveis de corrente,
ajustados para responder rapidamente e submetidos a flutuaes abruptas.
O circuito submetido a essas condies amplamente utilizado em
automao de mquinas ferramentas, interagindo com linhas eltricas ou de
comunicao muito ampla, e em casos nos quais grandes quantidades de energia
so rapidamente comutadas.[http://www.vargasp.net/download/livros/Automac4.pdf]
51
3.13.3 - Tenso de Isolao
a tenso mxima que o dieltrico pode suportar. Na tabela 1 so indicados
os parmetros que definem capacidades de tenso de isolao.
Esta propriedade depende da durao do esforo, a taxa de incremento da
tenso e das formas de onda.
A dependncia varia com o mtodo de construo do acoplador.
A influncia da forma de onda de tenso sobre a isolao de um acoplador
tem sido severamente investigada comparando as caractersticas de acopladores
com dieltrico de vidro com as de outros tipos de caractersticas compatveis.
As provas deram como resultado a diferena, em porcentagem, entre a
tolerncia a sobretenso na isolao de acopladores correspondentes as diversas
formas de onda aplicadas e os resultados obtidos com o mtodo especificado.
Essas porcentagens se aplicam a um dispositivo hipottico que tem uma
especificao de 1.000 Volt de pico.
Os resultados foram tabelados para determinarmos a verdadeira capacidade
de sobretenso transitria de isolao do dispositivo para cada forma de onda. Os
acopladores com outros materiais dieltricos e/ou fatores de forma dieltrica podem
ter diferentes dependncias entre a capacidade e a forma de onda.
O dieltrico de vidro tem propriedades eltricas e fatores de forma muito
constantes
seu
desempenho
consistente
[http://www.vargasp.net/download/livros/Automac4.pdf]
Tabela 1: Capacidade de isolao do acoplador
Fonte :<http://www.vargasp.net/download/livros/Automac4.pdf>
em
dispositivos
diferentes.
52
4 - METODOLOGIA DO PROJETO
4.1 - Determinando um mtodo
Para desenvolvermos este trabalho houve a necessidade de desenvolvermos
ou aplicarmos o mtodo de estudo de caso, pois prope uma soluo aplicvel
especificamente a uma determinada empresa. Fizemos o fluxograma que define
todas as possibilidades que podero surgir durante o desenvolvimento do projeto.
Todo o processo foi analisado pela equipe da rea de engenharia. A base aplicao
de mtodos foi toda ela trabalhada com pleno acompanhamento da Engenharia de
manuteno da INFRAERO..
Existem diversos mtodos de projeto, mas todos seguem uma estrutura
bsica:
1. Observao e anlise: Definio do problema, pesquisa, definio de
objetivos e restries;
2. Planejar e projetar: gerao de opes de projeto, escolha de opo de
projeto, desenvolvimento, aprimoramento, detalhamento;
3. Construir e executar: prottipo; produo
Assim, podemos descrever os seguintes passos:
Identificao de oportunidade
Anlise do problema (levantamento de informaes)
Gerao de idias (fontes / tcnicas)
Seleo de idias (triagem)
Desenvolvimento e teste do conceito
Anlise do negcio (financeira/comercial)
Desenvolvimento do produto
Teste de mercado
Comercializao
4.2 Fluxograma
Para iniciar as atividades, foi criado um fluxograma a fim de definir todas as
etapas a serem concludas neste projeto.
53
1.RECONHECIMENTO DE NECESSIDADE
2.COLETA DE DADOS
3.ANLISE DEOS DADOS
4.DEFINIO DO PROBLEMA
5.DEFINIO DE UMA PROPOSTA DE SOLUO
6.APRESENTAO DOS RESULTADOS COM PROTTIPO
Figura 26: Fluxograma do projeto
4.2.1 Reconhecimento da necessidade
Nessa fase a equipe se rene para definir que projeto ser apresentado. No
decorrer de reunies verificou-se a necessidade de reduzir custo sem perde as
caractersticas necessrias do sistema de controle atual e a possibilidade para
futuras implementaes sem a necessidades de troca de radware e sim apenas
modificar o software.
4.2.2 Coleta de dados
O processo de coleta de dados, segundo Marconi e Lakatos (1996), a
etapa da pesquisa onde se inicia a aplicao dos instrumentos elaborados e das
tcnicas selecionadas. Assim, como levantamento exploratrio, foi realizada uma
reviso dos materiais informativos disponveis, com o objetivo de orientar o estudo.
Posteriormente, os dados foram extrados das seguintes fontes:
Dados primrios, obtidos atravs de bibliografia especializada e de
entrevistas no estruturadas, seguindo-se a orientao de Rossetto (1998), que
possibilitaram ao entrevistado discorrer sobre o tema proposto, sem respostas ou
condies prefixadas pelo pesquisador. Entretanto, para obter dados sobre o
estudo de caso do TECA III do aeroporto internacional de Manaus foi feito um
estudo nos registros de manutenes preventivas e corretivas deste equipamento
nos ltimos dois anos. Finalmente, os dados secundrios foram obtidos.
54
4.2.3- Anlise de dados
Para a anlise do trabalho foi utilizada a metodologia de anlise de contedo,
mais especificamente, a anlise de resultados, que consiste em isolar temas de um
texto e extrair as partes utilizveis, de acordo com o problema pesquisado, para
permitir sua comparao com outros textos escolhidos da mesma maneira.
Geralmente, escolhem-se dois tipos de tema: - principais e secundrios. O primeiro
define o contedo da parte analisada de um texto; o segundo especifica diversos
aspectos includos no primeiro (RICHARDSON, 1999). Neste caso especfico, as
entrevistas sero comparadas entre si, visando no apenas a soluo do problema
da pesquisa, mas tambm sobre a aplicao desta proposta em outra empresas que
disponham de equipamentos similares ao aqui estudado.
4.2.4 Definio do problema
Este item est bem definido e detalhado na Introduo deste trabalho, no item
1.1. PROBLEMA. Todo o processo foi elaborado baseando-se na possibilidade de
resolver um problema eletrnico encontrado no mdulo de controle da subestao
do TECAIII. Foram realizadas coletas de dados baseados em todos os sensores que
o sistema possui e em todos os atuadores que esse equipamento coordena.
4.2.5 Definio de uma proposta de soluo
A proposta consiste na criar um mdulo de controle com base no
microcontrolador PIC18F4550 para substituir o mdulo da Lovato Eletric o RGK 60,
sendo que a utilizao deste equipamento ter a facilitar a manuteno do sistema e
deixa o cliente livre para qualquer modificao que queira realizar, e alm de tudo
sana as falhas que hoje o sistema possuem nos requisitos de selecionamento de
cargas prioritrias.
4.2.5.1 Modos de funcionamento do mdulo aqui apresentado
Este mdulo ira funciona supervisionando o fornecimento de energia eltrica
da consercionria, por meio de um equipamento que ira fazer a leitura de tenso e
frequncia e envia um sinal binrio ao controlador que dependendo de sua
programao
ir
responder,
observando
que
este
mdulo
tambm
esta
supervisionando o grupo gerado, observando desde os estatus para o grupo entra
55
em funcionamento como as grandezas que esse grupo ira gerar quando entra em
funcionamento.
5 - DESENVOLVIMENTO DO MDULO DE SUPERVISO E CONTROLE
De posse de todos os dados do sistema, foi analisando todas as
possibilidades de substituio do mdulo de controle hoje existente no TECA III,
sendo que para relacionar tudo que ser usado na montagem do mdulo idealizado,
foi verificado o que j estava disposto para ser montado o prottipo para ensaios,
sendo que, um dos itens que pesou na escolha do microcontrolador foi a vantagem
de j possuir o gravador do pic18F4550, o que levou a montar o projeto com o
mesmo, observando que ele supri todas as necessidades do sistema, da foi
colocado quantas entradas (I) e sadas (O) ir ter o prottipo, e analisando a
potncia e a sensibilidade das portas do PIC, foi configurado um circuito onde fosse
possvel isolar eletricamente por meio de um fotoacoplador o PIC do sinal recebi,
para evitar interferncias eltricas que pudessem causar falhas no sistema e nas
sadas foram instalados transistores com a funo de chaveamento para que por
meio deste, quando saturado pelo sinal de sada do pic possa acionar rels que
aumentam a consideravelmente a capacidade de conduo de corrente eltrica que
antes era de 25mA no pino do PIC, e agora na sada do rel passou a ser de 10A.
5.1 Montagem do Prottipo
Primeiro passo:
Itens a ser supervisionados:
Supervisor de tenso da rede eltrica da concessionria;
Supervisor de freqncia da rede eltrica da concessionria;
Supervisor de tenso da rede eltrica do grupo gerador;
Supervisor de freqncia da rede eltrica do grupo gerador;
Termostato;
Pressostato;
Boto de reset;
Boto de emergncia.
Obs: equivalente a 8 entradas do PIC, observando que todas elas so digitais.
Itens a serem coordenados:
56
Rel do motor de partida;
Rel que indica grupo em funcionamento;
Chave do grupo;
Chave da rede;
Sinal de falha na partida;
Sinal de falha no termostato/pressostato.
Obs: equivalente a 6 sadas do PIC, observando que no projeto todas so a
rel.
Segundo passo:
Desenvolvimentos dos circuitos eletrnicos de entrada e sada de nosso
controlador, tendo em vista que para termos um mdulo seguro, temos que isolar
eletricamente o PIC do sinal proveniente do sistema para evita que o mesmo venha
a interpretar erradamente sinais de oscilaes como comandos e at mesmo sofre
possveis danos com essas oscilaes.
Em sua entrada foi desenvolvido um circuito com led, resistor e um acoplador
ptico para conseguir a isolao desejada, e em sua sada foi instalado transistor
que ir ser saturado pelo sinal proveniente do PIC, e esse por sua vez ir servi como
chave de liga e desliga um rel, isso ir aumenta consideravelmente a capacidade
de conduo de corrente eltrica na sada.
Dados dos circuitos de entrada
COMPONENTE I MXIMA I NOMINAL
PIC 18F4550
25 ma
0,5 ma
4N25
180 ma
10 ma
LED
20 ma
10 ma
Tabela 2: Datasheet de components
TENSO
DADOS
2,2...5V DATASHEET
1.3...1,5V DATASHEET
2v
DATASHEET
TEMP
65 C
65 C
100 C
Clculo de R1:
Tenso da fonte (VF) menos queda de tenso LED (VL) e a queda de tenso
no acoplador (VA), dividido pelo corrente nominal do acoplador (IA)
R1= (VF-VL-VA)/10ma
R1= (24-2-1,3)/10ma = 2070
R1= 2K2 (EQUIVALENTE)
57
Clculo de R2:
Foi estabelecido uma corrente de 0,5 para entrada do PIC.
V= RI
R2= V/I
R2= 5V/0,5ma
R2= 10 K
VCC 5V
R2
10k
R1
LED 1
4N25
1
2k2
LED-RED
6
5
FONTE
RC0
24V
Figura 27: circuito entrada do microcontrolador
Fonte: Proteus Isis 7 profissional
Dados dos circuitos de sada
COMPONENTE
PIC 18F4550
TRANSISTOR
REL
LED
I MXIMA
25 ma
100 ma
50 ma
20 ma
I NOMINAL
0,5 ma
10 ma
30 ma (IR)
10 ma (IL)
TENSO
2,2...5V
1.18...1,5V
12V
2v
DADOS
DATASHEET
DATASHEET
DATASHEET
DATASHEET
TEMPERATURA
65 C
65 C
NA
100 C
Tabela 3: Datasheet de components
Feito levantamento das cargas que o transistor acionar. Para considerar uma
saturao forte, temos que ter o ganho de corrente igual a dez (10) ou seja a
corrente do coletor (IC) tm que ser dez vezes maior que a corrente da base (IB).
IC= (IL+IR)=(10+30)= 40 ma
IB= 40/10= 4 ma
Clculo de R3:
Foi definida uma corrente de 10ma no LED.
tenso da fonte (VF) menos queda de tenso no LED (VL).
R= V/I
R2=(VF-VL)/10ma
R2=(12-2)/10ma
R2=10 K
58
Clculo de R1:
R43= (VP-VBE)/IB
R43=(5-0,7)/4ma
R43=10 K (EQUIVALENTE)
R44
10k
J18
D18
LED
R43
RL8
1
2
3
Q8
BC337
RB1
10k
Figura 28: circuito de sada do microcontrolador
Fonte: Proteus Isis 7 profissional
Terceiro passo:
De posse de todos os clculos dos circuitos de entrada e da sada, foi
montado a pci com todos os componentes e desenvolvido a programao em C para
que o PIC realizasse todas as funes necessrias para o sistema funcionar.
Figura 29: Foto do prottipo
59
Programao em C
O Programa utilizado neste projeto foi a linguagem C, pela sua facilidade de
ser escrito e ser entendido, como tambm pela possibilidade de se usar em diversas
plataformas e at mesmo por poder inserir cdigos em assembly.
Para escrever esse programa, foi utilizado software MicroC PRO for PIC, onde
escrevemos e copilamos, e para grava no PIC, foi utilizado O WinPic800, todos dois
software podem ser baixados do site: (www.mecatronicadegaragem.blogspot.com)
Obs: as declaraes contidas no exemplo abaixo so as utilizadas no prottipo,
porm as instrues da funo principal so apenas para testes das I/O.
Exemplo de programao em C:
// DECLARAES DAS ENTRADAS DO CONTROLADOR
#define VR PORTD.F5
// TENSO DA REDE DA CONCERSSIONARIA
#define FR PORTD.F6
// FREQUENCIA DA REDE DA CONCERSSIONARIA
#define VG PORTD.F7
// TENSO DA REDE DO GERADOR
#define FG PORTC.F0
// TENSO DA REDE DO GERADOR
#define RESET PORTC.F1 // BOTO DE RESETE
#define TER PORTC.F2
// TERMOSTATO
#define PRE PORTD.F0
// PRESSOSTATO
#define BOT PORTD.F1
// BOTO DE EMERGNCIA
// DECLARAES DAS ENTRADAS DO CONTROLADOR
#define CHR PORTB.F7
// CHAVE QUE LIGA A REDE A CARGA
#define CHPG PORTB.F6
// GRUPO LIGADO
#define CHG PORTB.F5
// CHAVE QUE LIGA O GRUPO A CARGA
#define RP PORTB.F4
// REL DE PARTIDA
#define FPOUT PORTB.F3 // SINAL DE FALHA NO PARTIDA
#define FPOUT PORTB.F2 // SINAL DE FALHA NO TERMOSTAT/PRESSOSTAT
void main(){
TRISC.F0 = 1;
TRISC.F1 = 1;
TRISC.F2 = 1;
TRISD.F0 = 1;
60
TRISD.F6 = 1;
TRISD.F7 = 1;
TRISB = 0;
PORTB = 0;
while(1){
if(VR== 0 && FR == 0 VG == 0 && FG == 0 && RESET ==0 && PRE == 0 && TER
== 0 && BOT == O){
Delay_ms(500);
PORTB = 1;
Delay_ms(500);
PORTB = 0;
Delay_ms(500);}
5.1.1 - Funcionamento do prottipo
Se houver uma oscilao na freqncia ou na tenso da rede da
concessionria, por um tempo acima de 5 segundos, a chave de rede
ir ser desligada.
Ao abrir a chave de rede, o controlador ir ativar o rel de partida por 5
segundos, tempo esse estipulado para que o motor atinja 500 RPM.
Ao desligar o rel de partida, o controlador ir checar os nveis lgicos
das entradas de tenso e freqncia do grupo gerador e observa as
seguintes situaes:
Nvel lgico das entradas esto em 0, o rel de estatus indicara que o
grupo esta em funcionamento, logo aps a chave de grupo ser ligada;
Nvel lgico das entradas esto em 1, o rel de partida volta a ser
acionado, retomando ao procedimento de partida;
Nvel lgico em estatus diferentes um do outro, ser acionado o rel de
falha de partida, e o grupo ficar impossibilitado de funcionar, at que o
operador resolva o sinistro e resete o mdulo.
Durante o funcionamento do grupo gerador, se caso o controlador
reconhecer nvel lgico 0 por mais de 5 segundos na entrada do
termostato ou do pressostato ou nas duas ao mesmo tempo, o rel de
chave de grupo ser desligado, logo em seguida o grupo ser
61
desligado e ser acionado o rele de falha, bloqueando o grupo gerador
para uma possvel partida, at que o sinistro seja resolvido e o mdulo
seja resetado.
Se o controlador reconhecer nvel lgico 0 na entrada BOT que
definida como Boto de emergncia, todo o sistema ser desligado,
voltando a funciona somente aps este boto ser desativado.
Observando que a prioridade de funcionamento da rede da
concessionria e que caso o grupo gerador esteja em funcionamento,
e a rede da concessionria normalizar, o controlador ir esperar 5
segundos e caso no ocorra nenhuma oscilao neste intervalo de
tempo, a chave de grupo ir ser aberta e a da rede ser fechada, e
logo aps o tempo de refrigerao do grupo termine o mesmo ser
desligado.
Observando que as entradas do termostato e pressostato, quando
atuadas, impossibilita apenas o funcionamento do grupo gerador e no
da rede da concessionria.
6 - RESULTADOS
Com a finalidade de respaldar a proposta apresentada em nosso trabalho,
referente substituio do mdulo de controle (RGK 60) dos grupos geradores a
diesel, por um construdo com base em um microcontrolador PIC18F4550, foi criado
um prottipo visando simulao do funcionamento de todo sistema de controle,
desde alimentao da rede vindo da concessionria, passando pelo comando de
partida, simulando todos os possveis defeitos referentes s variveis propostas para
serem monitoradas, at a parada total do grupo gerador atravs da funo
emergncia.
Em anlises feitas sobre os objetivos propostos neste trabalho, que foi de
apresentar uma alternativa de sistema de superviso e controle com o prottipo aqui
desenvolvido, foi devidamente alcanado.
E com os testes realizados seguindo todos os procedimentos relatados no
funcionamento do prottipo descrito anteriormente, confirmamos que alcanamos
com xito todas as funes descritas a seguir:
Supervisionar tenso e a freqncia da rede da concessionria;
62
Supervisionar a tenso e a freqncia gerada pelo grupo gerador;
Supervisionar as condies necessrias para que o grupo gerador
trabalhe normalmente como: presso do leo lubrificante, temperatura
da gua de refrigerao, nvel de combustvel;
Gerenciar a abertura e o fechamento da chave que liga a rede da
concessionria carga;
Gerencia a abertura e fechamento da chave do grupo gerador carga;
Gerenciar partida e parada do grupo gerador;
Gerencia a parada de emergncia de todo o sistema;
Isolar eletricamente o PIC do sinal de entrada, por meio de um circuito
com acoplador ptico;
Aumenta a capacidade de conduo de corrente eltrica das sadas do
mdulo, por meio de um circuito com transistores e rels;
Evitar ao mximo contato direto do operador com grupo gerador, tendo
em vista que o mdulo realiza todas as funes que dependeriam da
interveno do operador;
Aprimoramos os conhecimentos em sistemas de superviso e controle
de grupos geradores;
Aprendemos a desenvolver projetos com base em microcontroladores,
especificamente o PIC184550;
Aprendemos a programa microcontroladores em C;
63
CONCLUSO
Aps todos os testes realizados com o prottipo aqui sugerido, conclumos
que este mdulo de controle ir suprir todas as necessidades do sistema de controle
da USCA do TECAIII do aeroporto internacional de Manaus, observando que devido
as caractersticas implantadas nas entradas do mdulo para isolar o PIC e o tipo de
sada que usamos, tornou esse equipamento bem mais confivel do que muitos que
existem no mercado.
O prottipo se mostrou eficiente tanto nas etapas de superviso, quanto na
de controle do sistema, observando que conseguimos sequenciar todas as
manobras de abertura e fechamento das chaves, de acordo com as informaes
recebidas em suas entradas.
Portanto conclumos que este projeto, independente das variveis que so
analisadas no grupo gerador, poder ser aplicado de forma simples, compacta, e
com um alto grau de confiana.
E fica aqui a sugesto para futuras pesquisas como base nesta aqui
apresentada, de que se aprofundem ainda mais no vasto mundo da programao
em C dos microcontroladores, pois partindo desse domnio esse projeto pode
expandir ainda mais, para possveis analises das grandezas analgicas e at
mesmo dispay para acompanhamento de informaes.
64
BIBLIOGRAFIA
[1] CERVO E BERVIAN. Metodologia cientfica: 5. ed. So Paulo: Erica, 2002.
[2] COTRIM, Ademaro A.M.B. , 1939- Instalaes Eltricas/ 5. ed.-- S P: Pearsom
Prenticeltall, 2009.
[3] CREDER, Helio.Instalaes Eltricas.Rio de Janeiro, 15 ed, LTC,2007.
[4]
Datasheet
do
microcontrolador
PIC18F4550.
Disponvel
em:
http://www.datasheetcatalog.org/datasheet/microchip/39617a.pdf. Acesso 05 de mar.
2011.
[5]
Datasheet
do
microcontrolador
4N25.
Disponvel
em:
http://www.datasheetcatalog.org/datasheet2/5/0q31rz2l22saewqwyx0shif48k3y.pdf.
Acesso em 05 de mar 2011.
[6] HUHNE. L. M. Metodologia Cientfica: Caderno de Texto e Tcnicas. 7. ed. So
Paulo, 1999.
[7] KOCHE. J.C. Metodologia Cientfica. 19. ed. So Paulo: Vozes, 1997.
[8] MAMEDE,Joo.Instalaes eltricas industriais.Rio de Janeiro,6 ed, LTC 2001.
[9] MARCOM.A,LAKATOS.E.M.: Metodologia de trabalho cientifico 6 ed.- So
Paulo: Atlas, 2001
[10] MARCONI, Marina de Andrade e LAKATOS, Eva Maria. Tcnicas de Pesquisa.
So Paulo:Atlas, 1996.
[11] MORAES E CASTRUCCI. Engenharia e Automao Industrial. So Paulo: LTC,
2001.
[12] MORAES.C.C,CASTRUII.P.L: Engenharia e Automao Industrial - 2. Ed .-Rio
de Janeiro: LTC, 2007.
[13] NATALE, Ferdinando: Automao Industrial 10. ed. ver. So Paulo: Erica, 2008
[14] NEBOJSA, Matic e DRAGAN Andric: The pic microcontroller. 2000
[15] PEREIRA, Jose Claudio.2006. Apostila tcnica sobre motores e geradores.
Disponvel em: <http://www.joseclaudio.eng.br/geradores/motores_geradores.html>.
Acesso em 05 de mar. de 2011.
[16] PEREIRA, Fabio - PIC Programao em C - 1 Edio - Editora rica, 2003
[17] SOUZA, Davi Jos de - Desbravando o PIC - 8 edio - Editora rica, 2005
[18] TOCCI,Ronaldo J.,WIDMER, Neal, S.Sistemas Digitais:Princpios e Aplicaes.
So Paulo, 8 ed,Pearson,2006.
65
[19] <http://www.vargasp.net/download/livros/Automac4.pdf>. Acesso em 05 de mar
de 2011
Vous aimerez peut-être aussi
- Esboços de Pregação - Sermões Prontos para Pregar PDFDocument21 pagesEsboços de Pregação - Sermões Prontos para Pregar PDFSergio Ricardo100% (23)
- Psicologia B 12Document50 pagesPsicologia B 12helenabrayPas encore d'évaluation
- ARTIÉRES, Philippe - Arquivar A Própria Vida - FichamentoDocument5 pagesARTIÉRES, Philippe - Arquivar A Própria Vida - Fichamentom.platini100% (2)
- Protocolo de Manchester ao Paciente Grave - Guia Completo para o PSDocument8 pagesProtocolo de Manchester ao Paciente Grave - Guia Completo para o PSMarcos AugustoPas encore d'évaluation
- AH0530B100001CDocument2 pagesAH0530B100001CdesrtyPas encore d'évaluation
- AR0120B5014HDocument6 pagesAR0120B5014HdesrtyPas encore d'évaluation
- VVT Gol 1.0 16vDocument5 pagesVVT Gol 1.0 16vAndré Gomes100% (5)
- AR0100B0001BDocument1 pageAR0100B0001BdesrtyPas encore d'évaluation
- AR0110B2400ADocument9 pagesAR0110B2400AdesrtyPas encore d'évaluation
- AR6010B5010CDocument4 pagesAR6010B5010CdesrtyPas encore d'évaluation
- AP0757B0730CDocument3 pagesAP0757B0730CdesrtyPas encore d'évaluation
- AR1321B0100DDocument2 pagesAR1321B0100DdesrtyPas encore d'évaluation
- AP1322B1351BDocument3 pagesAP1322B1351BdesrtyPas encore d'évaluation
- AP2800B2801ADocument2 pagesAP2800B2801AdesrtyPas encore d'évaluation
- AH1800B000102ADocument1 pageAH1800B000102AdesrtyPas encore d'évaluation
- WS0100B3003ADocument1 pageWS0100B3003AdesrtyPas encore d'évaluation
- AD0940B000101ADocument14 pagesAD0940B000101AdesrtyPas encore d'évaluation
- AP0757B0780ADocument3 pagesAP0757B0780AdesrtyPas encore d'évaluation
- AR0120B5014BDocument3 pagesAR0120B5014BdesrtyPas encore d'évaluation
- Ar0130b7162d PDFDocument6 pagesAr0130b7162d PDFdesrtyPas encore d'évaluation
- AR0120B5014GDocument3 pagesAR0120B5014GdesrtyPas encore d'évaluation
- AR0110B2400KDocument7 pagesAR0110B2400KdesrtyPas encore d'évaluation
- AR0110B2400FDocument7 pagesAR0110B2400FdesrtyPas encore d'évaluation
- AR0120B5014FDocument2 pagesAR0120B5014FdesrtyPas encore d'évaluation
- AR0130B5700ADocument3 pagesAR0130B5700AdesrtyPas encore d'évaluation
- WS0100B3090CDocument1 pageWS0100B3090CdesrtyPas encore d'évaluation
- AR0120B5014ADocument2 pagesAR0120B5014AdesrtyPas encore d'évaluation
- AR0110B2400LDocument1 pageAR0110B2400LdesrtyPas encore d'évaluation
- AR0145B750001CDocument1 pageAR0145B750001CdesrtyPas encore d'évaluation
- AR0120B5014ADocument2 pagesAR0120B5014AdesrtyPas encore d'évaluation
- WS0100B3104CDocument1 pageWS0100B3104CdesrtyPas encore d'évaluation
- AR0110B2401BDocument9 pagesAR0110B2401BdesrtyPas encore d'évaluation
- AR0130B5700ADocument3 pagesAR0130B5700AdesrtyPas encore d'évaluation
- AR0110B2401ADocument12 pagesAR0110B2401AdesrtyPas encore d'évaluation
- VO 02 00 Identificacao de Categorias ConceituaisDocument7 pagesVO 02 00 Identificacao de Categorias ConceituaisGislene DaniellePas encore d'évaluation
- Mip TomateiroDocument71 pagesMip TomateiroTúlio GuimarãesPas encore d'évaluation
- Nutrientes macronutrientes: carboidratos, proteínas e lipídeosDocument44 pagesNutrientes macronutrientes: carboidratos, proteínas e lipídeosDavi FelicioPas encore d'évaluation
- Power AnalyserDocument5 pagesPower AnalysertreaxPas encore d'évaluation
- Anexo-7-Termo Encaminhamento TratamentoDocument2 pagesAnexo-7-Termo Encaminhamento TratamentoRebecca FerreiraPas encore d'évaluation
- As vanguardas artísticas do início do século XXDocument2 pagesAs vanguardas artísticas do início do século XXAndreia SimõesPas encore d'évaluation
- Sólidos Geométricos - 5o AnoDocument4 pagesSólidos Geométricos - 5o AnoJulio Mello100% (1)
- Paralisia Do Sono - Pesquisa GoogleDocument1 pageParalisia Do Sono - Pesquisa Google7k94t8hk5kPas encore d'évaluation
- Jung Sobre A Imaginação Ativa - Joan ChodorowDocument17 pagesJung Sobre A Imaginação Ativa - Joan ChodorowRenata Fiorese FernandesPas encore d'évaluation
- Diivórcio deve ser promovido na Justiça estrangeiraDocument6 pagesDiivórcio deve ser promovido na Justiça estrangeiraMarcos CarvalhoPas encore d'évaluation
- Estatística 2 ResumidosDocument13 pagesEstatística 2 ResumidosBackup HannaPas encore d'évaluation
- Ensinamentos sobre a velhice e a morte em Eclesiastes 12Document2 pagesEnsinamentos sobre a velhice e a morte em Eclesiastes 12Silva FerreiraPas encore d'évaluation
- Sinais VitaisDocument48 pagesSinais VitaisVovote MomadePas encore d'évaluation
- Curso Pregação Transformadora 71 aulasDocument4 pagesCurso Pregação Transformadora 71 aulasAlisson Barbosa0% (1)
- Cálculo de áreas para estimar custos de pisosDocument10 pagesCálculo de áreas para estimar custos de pisosPaulo PereiraPas encore d'évaluation
- Avaliação de desempenho: conceitos, objetivos e fatores influenciadoresDocument178 pagesAvaliação de desempenho: conceitos, objetivos e fatores influenciadoresJoanna Logan100% (2)
- CEPS PedreiraDocument12 pagesCEPS PedreiracheganzarolliPas encore d'évaluation
- GPE - Reestruturação Dos Cadastros e Cálculos Dos Planos de SaúdeDocument86 pagesGPE - Reestruturação Dos Cadastros e Cálculos Dos Planos de SaúdeDervelly AndersonPas encore d'évaluation
- Apostila DocWinDocument88 pagesApostila DocWinMarcus FelipePas encore d'évaluation
- Políticas Segurança Informação antes Perigo IminenteDocument2 pagesPolíticas Segurança Informação antes Perigo IminenteJoão Victor GiuzeppePas encore d'évaluation
- 3D&T Baú Do Tesouro de ArtonDocument29 pages3D&T Baú Do Tesouro de Artontane125Pas encore d'évaluation
- A Espanha e Miguel Torga PDFDocument70 pagesA Espanha e Miguel Torga PDFTania MartinezPas encore d'évaluation
- Smart ClassDocument8 pagesSmart ClassArthur De Freitas LealPas encore d'évaluation
- Contrato Individual de TrabahoDocument7 pagesContrato Individual de TrabahoAna Lima100% (1)
- AIRC - Contestação - José Carlos Faria X PoldermanDocument9 pagesAIRC - Contestação - José Carlos Faria X PoldermanAnonymous T1R768f6aPas encore d'évaluation
- Introdução à anatomia e histologia do sistema nervosoDocument6 pagesIntrodução à anatomia e histologia do sistema nervosogelu1999Pas encore d'évaluation