Vous aimerez peut-être aussi
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Piper Malibu Airplane Parts CatalogDocument678 pagesPiper Malibu Airplane Parts CatalogMark Nash100% (3)
- AWS Inspection Pocket BookDocument40 pagesAWS Inspection Pocket BookBrant AkkanPas encore d'évaluation
- AWS Inspection Pocket BookDocument40 pagesAWS Inspection Pocket BookBrant AkkanPas encore d'évaluation
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- Bolt TighteningDocument6 pagesBolt TighteningȘtefan PogrebanPas encore d'évaluation
- PHB2 PVDocument5 pagesPHB2 PVMarusan Petpookaew0% (1)
- WIS 10 Interp ExeDocument67 pagesWIS 10 Interp Exelembugs100% (1)
- A320 Easa Placard RequirementDocument54 pagesA320 Easa Placard RequirementChoirul Cahya Wibowo -50% (2)
- SAR-Principles and ApplicationsDocument62 pagesSAR-Principles and ApplicationsMarusan PetpookaewPas encore d'évaluation
- Safo 153Document36 pagesSafo 153Panos ThalassisPas encore d'évaluation
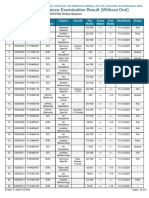
- CIVIL AVIATION LICENCE EXAM RESULTSDocument376 pagesCIVIL AVIATION LICENCE EXAM RESULTSRaveendran Sukumaran PareshnathPas encore d'évaluation
- Kruger Fan InstalltionDocument10 pagesKruger Fan Installtionjames_chan2178100% (1)
- Star Wars Origami Contest - 1Document4 pagesStar Wars Origami Contest - 1GUMUCIOPas encore d'évaluation
- Hovercraft DesignDocument21 pagesHovercraft DesignGlacier RamkissoonPas encore d'évaluation
- A321 Ams Issue 15 Amd 00 FinalDocument782 pagesA321 Ams Issue 15 Amd 00 FinalTony ThanhPas encore d'évaluation
- Measure Water Vapor Air PsychrometerDocument5 pagesMeasure Water Vapor Air PsychrometerMarusan PetpookaewPas encore d'évaluation
- Book ListDocument22 pagesBook ListMarusan PetpookaewPas encore d'évaluation
- Water in Air Calculator - Version 3Document7 pagesWater in Air Calculator - Version 3Marusan PetpookaewPas encore d'évaluation
- "Fiberglass" (Glass-Fiber-Reinforced Thermosetting-Resin) Pressure Pipe FittingsDocument5 pages"Fiberglass" (Glass-Fiber-Reinforced Thermosetting-Resin) Pressure Pipe FittingsMarusan PetpookaewPas encore d'évaluation
- Beam Is A Structural Member That Supports The Transverse Load Which Usually Rest On Supports at Its EndDocument9 pagesBeam Is A Structural Member That Supports The Transverse Load Which Usually Rest On Supports at Its EndMarusan PetpookaewPas encore d'évaluation
- Beam Is A Structural Member That Supports The Transverse Load Which Usually Rest On Supports at Its EndDocument9 pagesBeam Is A Structural Member That Supports The Transverse Load Which Usually Rest On Supports at Its EndMarusan PetpookaewPas encore d'évaluation
- Beam Is A Structural Member That Supports The Transverse Load Which Usually Rest On Supports at Its EndDocument9 pagesBeam Is A Structural Member That Supports The Transverse Load Which Usually Rest On Supports at Its EndMarusan PetpookaewPas encore d'évaluation
- Wall FormsDocument2 pagesWall FormsMarusan PetpookaewPas encore d'évaluation
- Next Generation Free Space Optics System For Ubiquitous CommunicationsDocument6 pagesNext Generation Free Space Optics System For Ubiquitous CommunicationsMarusan PetpookaewPas encore d'évaluation
- 1 s2.0 S2352854015000480 Main PDFDocument7 pages1 s2.0 S2352854015000480 Main PDFMarusan PetpookaewPas encore d'évaluation
- 50 Tons Tadano TR 500m 31Document4 pages50 Tons Tadano TR 500m 31Marusan PetpookaewPas encore d'évaluation
- Prestressed StructureDocument5 pagesPrestressed StructureMOST PASONPas encore d'évaluation
- Plastic Welding Using Kamweld S Durable WeldersDocument33 pagesPlastic Welding Using Kamweld S Durable WeldersMarusan PetpookaewPas encore d'évaluation
- Structural Steel Welding - Semih Genculu, P.EDocument18 pagesStructural Steel Welding - Semih Genculu, P.ErobersasmitaPas encore d'évaluation
- Journal of Composite Materials 2013 Almusallam 393 407Document16 pagesJournal of Composite Materials 2013 Almusallam 393 407Marusan PetpookaewPas encore d'évaluation
- Vertical Take-Off and Landing (VTOL) : University of Colorado, Boulder, CO, 80309Document8 pagesVertical Take-Off and Landing (VTOL) : University of Colorado, Boulder, CO, 80309Divy AgarwalPas encore d'évaluation
- Knowledge Management in NASADocument23 pagesKnowledge Management in NASAninisbpptPas encore d'évaluation
- Pacific Turbine Brisbane DocumentDocument24 pagesPacific Turbine Brisbane DocumenttcalithPas encore d'évaluation
- SCJ-MA3700-A3-Loads - (Week 2)Document28 pagesSCJ-MA3700-A3-Loads - (Week 2)crtvePas encore d'évaluation
- Columns and StrutsDocument25 pagesColumns and StrutsRabia ZulqarnainPas encore d'évaluation
- Gas Turbine NotesDocument21 pagesGas Turbine NotesJohn BlackburnPas encore d'évaluation
- Roger Blue LeaderDocument3 pagesRoger Blue LeadercrdewittPas encore d'évaluation
- Tac73 11Document32 pagesTac73 11TatePas encore d'évaluation
- AMC1 FCL.310; FCL.515(b); FCL.615(b) Appendix Subject 10 — Air LawDocument681 pagesAMC1 FCL.310; FCL.515(b); FCL.615(b) Appendix Subject 10 — Air LawDammy BommyPas encore d'évaluation
- Introduction To Aerospace Engineering and Design Aircraft PerformanceDocument1 pageIntroduction To Aerospace Engineering and Design Aircraft PerformancebooksforfunPas encore d'évaluation
- B2 Hot Air BalloonsDocument2 pagesB2 Hot Air BalloonsElif KoksalPas encore d'évaluation
- AJVG Aeronet 2011Document28 pagesAJVG Aeronet 2011Bheemesh GudelliPas encore d'évaluation
- Blighter b400 Series Radar Fact Sheet Def0616Document2 pagesBlighter b400 Series Radar Fact Sheet Def0616Mohammed FellaniPas encore d'évaluation
- Aviation History's Wider Social ContextDocument15 pagesAviation History's Wider Social ContextAchmad FauzanPas encore d'évaluation
- High Level Architecture Based Simulation For Aircraft Carrier Deck Operations PDFDocument5 pagesHigh Level Architecture Based Simulation For Aircraft Carrier Deck Operations PDFjwpaprk1Pas encore d'évaluation
- FAA Safety Briefing Nov-Dec 2017 PDFDocument36 pagesFAA Safety Briefing Nov-Dec 2017 PDFAllison JacobsonPas encore d'évaluation
- Chapter 9 Homework Problems Speed of Sound Mach NumbersDocument10 pagesChapter 9 Homework Problems Speed of Sound Mach NumberssilverknightPas encore d'évaluation
- Virtual Flight Planning SolutionsDocument1 pageVirtual Flight Planning SolutionsBruno GasperinPas encore d'évaluation
- J. Gordon Leishman Professor of Aerospace Engineering, University of Maryland, College ParkDocument27 pagesJ. Gordon Leishman Professor of Aerospace Engineering, University of Maryland, College ParkRo Avelino TeixeiraPas encore d'évaluation
- Repairing Main Rotor Blade Leading Edge CorrosionDocument3 pagesRepairing Main Rotor Blade Leading Edge Corrosionnimo1949Pas encore d'évaluation
- Joint Operations J FireDocument100 pagesJoint Operations J Fire240gulfPas encore d'évaluation
- Advanced ATM System FeaturesDocument39 pagesAdvanced ATM System FeaturesjubptaPas encore d'évaluation