Vous aimerez peut-être aussi
- Study of StartersDocument6 pagesStudy of StartersGANESH KUMAR B eee2018Pas encore d'évaluation
- D.C Motor StarterDocument4 pagesD.C Motor Starterkarthime0857% (7)
- Investor Presentation 2020 Cse:Eats - Otcpk:Eatbf - Frankfurt:988.FDocument24 pagesInvestor Presentation 2020 Cse:Eats - Otcpk:Eatbf - Frankfurt:988.FSSPas encore d'évaluation
- (TI) PLL Performance, Simulation 5th Edition-Dean Banerjee PDFDocument497 pages(TI) PLL Performance, Simulation 5th Edition-Dean Banerjee PDFMuresan GabrielPas encore d'évaluation
- Starting, Speed Control and Braking of DC Motors: Unit-VDocument32 pagesStarting, Speed Control and Braking of DC Motors: Unit-VPrathap VuyyuruPas encore d'évaluation
- 3-Point Starter NotesDocument5 pages3-Point Starter NotesBobbyPas encore d'évaluation
- DC Motor StartersDocument6 pagesDC Motor StartersAreeb KhanPas encore d'évaluation
- Experiment No: - 1 Aim: To Study The D.c.shunt Motor StarterDocument2 pagesExperiment No: - 1 Aim: To Study The D.c.shunt Motor StarterVishal PatelPas encore d'évaluation
- DC MOTOR STARTER TYPESDocument6 pagesDC MOTOR STARTER TYPESGANESH KUMAR B eee2018Pas encore d'évaluation
- Topic: Starter of Engine Branch: Electrical Engineering: Prepared By:-Guided ByDocument16 pagesTopic: Starter of Engine Branch: Electrical Engineering: Prepared By:-Guided ByTanvi KhuranaPas encore d'évaluation
- Experiment Number 1Document7 pagesExperiment Number 1saksham mahajanPas encore d'évaluation
- Panimalar Engineering Collge: Starting MethodsDocument20 pagesPanimalar Engineering Collge: Starting MethodssivaPas encore d'évaluation
- DC MOTOR STARTER GUIDEDocument25 pagesDC MOTOR STARTER GUIDESrinivasan PrakashPas encore d'évaluation
- Starting of DC MotorDocument7 pagesStarting of DC Motorabbas bilalPas encore d'évaluation
- 3 Point or 4 Point StarterDocument5 pages3 Point or 4 Point StarterAmar PandaPas encore d'évaluation
- Mahalakshmi: Engineering CollegeDocument21 pagesMahalakshmi: Engineering CollegesenthilkumarPas encore d'évaluation
- Starting Methods of DC MotorsDocument13 pagesStarting Methods of DC MotorsZealWolfPas encore d'évaluation
- Lab 3: Separately Excited DC Generator (Open Circuit Characteristics)Document3 pagesLab 3: Separately Excited DC Generator (Open Circuit Characteristics)Kendall BirjuePas encore d'évaluation
- Ee6365 Electrical Engineering LaboratoryDocument75 pagesEe6365 Electrical Engineering LaboratoryNarasimman DonPas encore d'évaluation
- Interview Questions For Eee StudentsDocument11 pagesInterview Questions For Eee StudentsAli ZafarPas encore d'évaluation
- Basic Elec Theory Week 2Document85 pagesBasic Elec Theory Week 2Michael WheelerPas encore d'évaluation
- UNIT-III STARTING METHODS - FinalDocument11 pagesUNIT-III STARTING METHODS - FinalmahaPas encore d'évaluation
- No Load and Load Test On A DC Shunt GeneratorDocument3 pagesNo Load and Load Test On A DC Shunt GeneratorHazoorAhmadPas encore d'évaluation
- Be3251 Beee QBDocument3 pagesBe3251 Beee QBMr MoviePas encore d'évaluation
- Cheap 220V AC Mobile Charger Circuit DiagramDocument3 pagesCheap 220V AC Mobile Charger Circuit DiagramBhadreshkumar SharmaPas encore d'évaluation
- Unit 3Document44 pagesUnit 3jeyal578Pas encore d'évaluation
- DC GeneratorDocument6 pagesDC GeneratorUditya K100% (1)
- Exp 10Document9 pagesExp 10Vamsi RamPas encore d'évaluation
- 电磁电机-3 直流无刷电机Document37 pages电磁电机-3 直流无刷电机Jiyuan JiaPas encore d'évaluation
- DC StartersDocument20 pagesDC StartersGAURAV BHARADWAJPas encore d'évaluation
- 2 038 PDFDocument11 pages2 038 PDFAmit GauravPas encore d'évaluation
- Gandhinagar Institute of TechnologyDocument25 pagesGandhinagar Institute of TechnologyMohammed Jalaluddin RayeenPas encore d'évaluation
- Figure 1 Power Supply SystemDocument11 pagesFigure 1 Power Supply SystembikashhhPas encore d'évaluation
- 3 Point StarterDocument2 pages3 Point StarterAkash APas encore d'évaluation
- Motor Starter Ac Motor StartersDocument6 pagesMotor Starter Ac Motor StartersShukor Az100% (1)
- Automatic IR Tap ControllerDocument67 pagesAutomatic IR Tap ControllerAnkit88% (16)
- EE6352 Electrical Engineering and InstruDocument27 pagesEE6352 Electrical Engineering and InstruSaravanan ArulmaniPas encore d'évaluation
- ECE Electrical Engineering 2 Marks PDFDocument22 pagesECE Electrical Engineering 2 Marks PDFsivagamiPas encore d'évaluation
- It Would Be Useful To Be Able To Run A Motor in Either Direction Using H BridgeDocument51 pagesIt Would Be Useful To Be Able To Run A Motor in Either Direction Using H BridgeatulhinduPas encore d'évaluation
- Electrical Engineering and Instrumentation QuestionsDocument20 pagesElectrical Engineering and Instrumentation QuestionsMohammed AkilPas encore d'évaluation
- Design of Starters and Their TypesDocument20 pagesDesign of Starters and Their TypesSai Pranahita KulithalaiPas encore d'évaluation
- 3 Point Starter Working Principle & ConstructionDocument6 pages3 Point Starter Working Principle & ConstructionsuryavignePas encore d'évaluation
- Abb Kab High Impedance Bus Diffrl RelayDocument16 pagesAbb Kab High Impedance Bus Diffrl RelaymentongPas encore d'évaluation
- Transformers: How They Work and Transformer TestsDocument36 pagesTransformers: How They Work and Transformer TestsdurgaraoPas encore d'évaluation
- VivaDocument8 pagesVivasaraneeePas encore d'évaluation
- INDUCTION MOTOR TESTINGDocument13 pagesINDUCTION MOTOR TESTINGNaresh GollapalliPas encore d'évaluation
- AC Circuits: What's The Difference Between A.C. and D.C.? Transformers Rectifiers Capacitors ResonanceDocument12 pagesAC Circuits: What's The Difference Between A.C. and D.C.? Transformers Rectifiers Capacitors ResonanceamirhazwanPas encore d'évaluation
- Thyristors: Bidirectional Trigger Diode (DIAC)Document16 pagesThyristors: Bidirectional Trigger Diode (DIAC)anthonyrobertxPas encore d'évaluation
- Power Supply: Block DiagramDocument14 pagesPower Supply: Block DiagramVamsi SakhamuriPas encore d'évaluation
- Chapter 2, TransformerDocument28 pagesChapter 2, Transformertemesgen adugnaPas encore d'évaluation
- Chapter 2, Transformer FinalDocument37 pagesChapter 2, Transformer Finaltemesgen adugnaPas encore d'évaluation
- Motor StartersDocument9 pagesMotor Startersanon_896479742Pas encore d'évaluation
- Basic of ElectricalDocument10 pagesBasic of ElectricalAbdul RazzakPas encore d'évaluation
- HTTPSWWW - Sathyabama.ac - Insitesdefaultfilescourse Material2020 10UNIT II 4 PDFDocument29 pagesHTTPSWWW - Sathyabama.ac - Insitesdefaultfilescourse Material2020 10UNIT II 4 PDFVigneshwaran J vPas encore d'évaluation
- DC Motor and Timer IC ProjectsDocument24 pagesDC Motor and Timer IC ProjectsBaldha JayvantPas encore d'évaluation
- Manual Ee IVDocument56 pagesManual Ee IVAkhilesh Kumar MishraPas encore d'évaluation
- DC Motor Part IIIDocument26 pagesDC Motor Part IIIMohd YasirPas encore d'évaluation
- DC Generator Lec 2Document21 pagesDC Generator Lec 2Ena Leanica DelgadoPas encore d'évaluation
- Electromagnetic, Thermal, Static and Microprocessor RelaysDocument11 pagesElectromagnetic, Thermal, Static and Microprocessor RelaysSoumajit PoddarPas encore d'évaluation
- DC Motor Characteristics InvestigationDocument7 pagesDC Motor Characteristics InvestigationAhmar KhanPas encore d'évaluation
- 3 Point StarterDocument16 pages3 Point StarterSameer Sharma0% (1)
- To Whomever It May ConcernDocument2 pagesTo Whomever It May ConcernSSPas encore d'évaluation
- ILFSDocument1 pageILFSSSPas encore d'évaluation
- Optima - Group 8 - Slide5Document3 pagesOptima - Group 8 - Slide5SSPas encore d'évaluation
- Who Ced Phe 18.01 EngDocument82 pagesWho Ced Phe 18.01 EngHimanth NersuPas encore d'évaluation
- Optima - Group 8 - Slide5Document3 pagesOptima - Group 8 - Slide5SSPas encore d'évaluation
- Business Ready - Negative Oil PricesDocument3 pagesBusiness Ready - Negative Oil PricesSSPas encore d'évaluation
- Philippines - Transportation Services, September 2017Document26 pagesPhilippines - Transportation Services, September 2017SSPas encore d'évaluation
- Ifrs in Depth A New Era of LeasingDocument36 pagesIfrs in Depth A New Era of LeasingAndy YuliusPas encore d'évaluation
- Business Ready - Mega Deal Jio FBDocument5 pagesBusiness Ready - Mega Deal Jio FBSSPas encore d'évaluation
- Essentiel VGB PDFDocument36 pagesEssentiel VGB PDFSSPas encore d'évaluation
- Optima - Group 8 - Slide5Document3 pagesOptima - Group 8 - Slide5SSPas encore d'évaluation
- Glossary of AcronymsDocument2 pagesGlossary of AcronymsnurzhnPas encore d'évaluation
- Optima - Group 8 - Slide5Document3 pagesOptima - Group 8 - Slide5SSPas encore d'évaluation
- ChildFund AR 2018-Final PDFDocument20 pagesChildFund AR 2018-Final PDFSSPas encore d'évaluation
- Impact Report - Digital PDFDocument90 pagesImpact Report - Digital PDFSSPas encore d'évaluation
- ChildFund AR 2018-Final PDFDocument20 pagesChildFund AR 2018-Final PDFSSPas encore d'évaluation
- 5dbfb2e0e85b1 The Catalyst Case Study PDFDocument7 pages5dbfb2e0e85b1 The Catalyst Case Study PDFMayyank GargPas encore d'évaluation
- Convo FormDocument1 pageConvo FormSSPas encore d'évaluation
- Percentile CalculatorDocument8 pagesPercentile CalculatorMikulPatelPas encore d'évaluation
- Spra 588Document86 pagesSpra 588asokanenPas encore d'évaluation
- GPIODocument19 pagesGPIOSSPas encore d'évaluation
- RajguruDocument8 pagesRajguruSSPas encore d'évaluation
- Task Scheduling IDocument21 pagesTask Scheduling IbennettmatthewPas encore d'évaluation
- Canada Gauss 1999 PDFDocument2 pagesCanada Gauss 1999 PDFSSPas encore d'évaluation
- Syllabus - ObDocument1 pageSyllabus - ObSSPas encore d'évaluation
- Circuit BreakerDocument37 pagesCircuit BreakerSSPas encore d'évaluation
- PGDBA Admission 2017 Instructions For Online Application: To Apply Online, An Applicant Must Have Access ToDocument3 pagesPGDBA Admission 2017 Instructions For Online Application: To Apply Online, An Applicant Must Have Access ToSSPas encore d'évaluation
- Bhgat SingDocument7 pagesBhgat SingSSPas encore d'évaluation
- Early Life: Bhagat Singh Rajguru SukhdevDocument2 pagesEarly Life: Bhagat Singh Rajguru SukhdevSSPas encore d'évaluation
- EmtlDocument707 pagesEmtlLaxmiSahithi100% (1)
- Folleto T-5Document5 pagesFolleto T-5giulianogjPas encore d'évaluation
- Chapter 25Document57 pagesChapter 25Rawan Z NemerPas encore d'évaluation
- Holmarc Lab EquipmentsDocument24 pagesHolmarc Lab EquipmentsatswallaPas encore d'évaluation
- Unids6 Manual v100Document24 pagesUnids6 Manual v100oya27910Pas encore d'évaluation
- YEW UP35A ManualDocument404 pagesYEW UP35A ManualJhonatan BuenoPas encore d'évaluation
- XT5042 - Datasheet PDFDocument2 pagesXT5042 - Datasheet PDFlabbasatyamPas encore d'évaluation
- Piezo SwitchesDocument11 pagesPiezo Switchesh2odavidPas encore d'évaluation
- Urdu SoftwareDocument8 pagesUrdu SoftwaresamandarshahPas encore d'évaluation
- SCANIA CoordInator PinoutDocument10 pagesSCANIA CoordInator Pinoutnicamarcos83% (12)
- Troubleshooting For M38 InstrumentsDocument7 pagesTroubleshooting For M38 Instrumentsm606Pas encore d'évaluation
- Coin Operated Water Vending MachineDocument2 pagesCoin Operated Water Vending MachineTrexine BaldelovarPas encore d'évaluation
- RAK811 Lora Module Datasheet V1.3Document14 pagesRAK811 Lora Module Datasheet V1.3Tonny-Leonard FarauanuPas encore d'évaluation
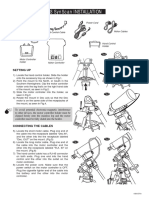
- EQ3 SynScan INSTALLATION guideDocument1 pageEQ3 SynScan INSTALLATION guideOscar MalamudPas encore d'évaluation
- 7SR10 Argus: Reyrolle Protection DevicesDocument307 pages7SR10 Argus: Reyrolle Protection DevicesVitoria Dos AnjosPas encore d'évaluation
- READMEDocument8 pagesREADMESukarno Wong PatiPas encore d'évaluation
- List of Companies Empanelled With UPDESCODocument5 pagesList of Companies Empanelled With UPDESCOriju nairPas encore d'évaluation
- Evaluating JFET Transistors for Linear Performance in Active Antenna DesignsDocument9 pagesEvaluating JFET Transistors for Linear Performance in Active Antenna DesignsAlex SanPas encore d'évaluation
- Secop Compressors CatalogueDocument180 pagesSecop Compressors CatalogueBraian Cabañas Visca BarçaPas encore d'évaluation
- 3ADW000163R0201 - Technical Guide - e - B PDFDocument28 pages3ADW000163R0201 - Technical Guide - e - B PDFAhmed MoustafaPas encore d'évaluation
- Synchronous Servo Motor For Screw Drives (Direct Drive For Threaded Nut)Document20 pagesSynchronous Servo Motor For Screw Drives (Direct Drive For Threaded Nut)markokocPas encore d'évaluation
- 3 Discrimination With Power Circuit-BreakersDocument9 pages3 Discrimination With Power Circuit-BreakersAsanka RodrigoPas encore d'évaluation
- Laplace TransformsDocument22 pagesLaplace TransformsAustin JamesPas encore d'évaluation
- Electronic Voltage Regulator R100 PDFDocument3 pagesElectronic Voltage Regulator R100 PDFOleg OrnatskyiPas encore d'évaluation
- MFA350 :: ROAL Living EnergyDocument7 pagesMFA350 :: ROAL Living EnergyMinhPas encore d'évaluation
- Hoja de Datos PLC 1762:L4Document35 pagesHoja de Datos PLC 1762:L4Martin GuzmanPas encore d'évaluation
- 74HC HCT597Document20 pages74HC HCT597Hamid SamavatiPas encore d'évaluation
- Basics of VFDDocument10 pagesBasics of VFDMubarak BashaPas encore d'évaluation
- Archtecture of CPUDocument8 pagesArchtecture of CPUsathishinvinciblePas encore d'évaluation