Vous aimerez peut-être aussi
- Quinta ClaseDocument74 pagesQuinta ClaseMilton Inga79% (33)
- Canciones Semana SantaDocument5 pagesCanciones Semana SantaFreddy Alejandro Hermosa FloresPas encore d'évaluation
- Afilado de BurilDocument13 pagesAfilado de Burilʙᴀʀʀɪᴏs ᴍᴀʀᴛɪ́ɴᴇᴢ ᴍɪᴄʜᴇʟPas encore d'évaluation
- 20170829-Reporte de Pruebas de Termostato Rc-11162-2Document1 page20170829-Reporte de Pruebas de Termostato Rc-11162-2Freddy Alejandro Hermosa FloresPas encore d'évaluation
- Nuevo Power Version 4.2 EspañolDocument67 pagesNuevo Power Version 4.2 EspañoljorgecastlePas encore d'évaluation
- Tempano 210 Op000 Pruebas para ProducciónDocument1 pageTempano 210 Op000 Pruebas para ProducciónFreddy Alejandro Hermosa FloresPas encore d'évaluation
- Himalaya 128 PD Op00101 Lab#101Document1 pageHimalaya 128 PD Op00101 Lab#101Freddy Alejandro Hermosa FloresPas encore d'évaluation
- Inventario BodegaDocument2 pagesInventario BodegaFreddy Alejandro Hermosa FloresPas encore d'évaluation
- Teletrabajo AbrilDocument5 pagesTeletrabajo AbrilFreddy Alejandro Hermosa FloresPas encore d'évaluation
- Historial Tempano 270Document13 pagesHistorial Tempano 270Freddy Alejandro Hermosa FloresPas encore d'évaluation
- FORMATODocument4 pagesFORMATOFreddy Alejandro Hermosa FloresPas encore d'évaluation
- 20170829-Reporte de Pruebas de Termostato Rc-11062-4Document1 page20170829-Reporte de Pruebas de Termostato Rc-11062-4Freddy Alejandro Hermosa FloresPas encore d'évaluation
- Tipos de DiodosDocument4 pagesTipos de DiodosLuis Alejandro Serrano SotoPas encore d'évaluation
- Codificación MP3Document27 pagesCodificación MP3Freddy Alejandro Hermosa FloresPas encore d'évaluation
- Deber 1Document2 pagesDeber 1Freddy Alejandro Hermosa FloresPas encore d'évaluation
- 14735721Document21 pages14735721Freddy Alejandro Hermosa FloresPas encore d'évaluation
- Taller Control ModernoDocument3 pagesTaller Control ModernoFreddy Alejandro Hermosa FloresPas encore d'évaluation
- CoplasDocument4 pagesCoplasFreddy Alejandro Hermosa FloresPas encore d'évaluation
- Canchimalero Score CoroDocument3 pagesCanchimalero Score CoroFreddy Alejandro Hermosa Flores0% (1)
- Mensaje de Los Angeles FH2016v0.02Document2 pagesMensaje de Los Angeles FH2016v0.02Freddy Alejandro Hermosa FloresPas encore d'évaluation
- 1516pub PDFDocument102 pages1516pub PDFFreddy Alejandro Hermosa FloresPas encore d'évaluation
- Pasacalle Flor Zambicena Paco Godoy PDFDocument11 pagesPasacalle Flor Zambicena Paco Godoy PDFFreddy Alejandro Hermosa FloresPas encore d'évaluation
- Taller Control ModernoDocument3 pagesTaller Control ModernoFreddy Alejandro Hermosa FloresPas encore d'évaluation
- Trucos de Excel y VBA v3Document17 pagesTrucos de Excel y VBA v3ÓrtixxÁndrexxPas encore d'évaluation
- Carol Baur BlindbotDocument3 pagesCarol Baur BlindbotFreddy Alejandro Hermosa FloresPas encore d'évaluation
- 2013青智综合样册Document32 pages2013青智综合样册Freddy Alejandro Hermosa FloresPas encore d'évaluation
- Actividades AdaptaciónDocument3 pagesActividades AdaptaciónFreddy Alejandro Hermosa FloresPas encore d'évaluation
- Conclusiones 01Document1 pageConclusiones 01Freddy Alejandro Hermosa FloresPas encore d'évaluation
- Marlon Trabajo Pasillos Letras y AcordesDocument89 pagesMarlon Trabajo Pasillos Letras y AcordesFreddy Alejandro Hermosa FloresPas encore d'évaluation
- Graficas RizadoDocument4 pagesGraficas RizadoFreddy Alejandro Hermosa FloresPas encore d'évaluation
- Denavit HartenbergDocument12 pagesDenavit HartenbergMinerva VargasPas encore d'évaluation
- RONDO Mechanische Ausrollmaschine Mechanical Dough Sheeter ESDocument6 pagesRONDO Mechanische Ausrollmaschine Mechanical Dough Sheeter ESSarahi ArenasPas encore d'évaluation
- Memoria Calculo Estrutural de TECHUMBREDocument20 pagesMemoria Calculo Estrutural de TECHUMBREanna nuñezPas encore d'évaluation
- Comparación Entre Applets, CGI, PHP, ASP, Servlets y JSPDocument15 pagesComparación Entre Applets, CGI, PHP, ASP, Servlets y JSPDavid MedinaPas encore d'évaluation
- Capacitor MicroondasDocument1 pageCapacitor MicroondasBaltazar VargasPas encore d'évaluation
- MT. ExtintoresDocument9 pagesMT. ExtintoresGeoffrey Collantes JulcaPas encore d'évaluation
- El Efecto de La Presión AtmosféricaDocument3 pagesEl Efecto de La Presión AtmosféricaKarlita DazaPas encore d'évaluation
- Diseño de GavionesDocument2 pagesDiseño de GavionesGianellitah Tic'MenPas encore d'évaluation
- Man. Asistida, Computadora y C Numérico 31 - 08 - 21Document49 pagesMan. Asistida, Computadora y C Numérico 31 - 08 - 21David GonzalezPas encore d'évaluation
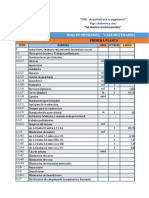
- Hoja de Metrados Casa Multifamiliar 1Document14 pagesHoja de Metrados Casa Multifamiliar 1Alfredo AlfreditoPas encore d'évaluation
- 2do Parcial - Ms-Ii - 08-11-2021Document4 pages2do Parcial - Ms-Ii - 08-11-2021Juan Carlos Aguilar SandovalPas encore d'évaluation
- Rendimientos T Arquitectura y Civil EstructuralDocument54 pagesRendimientos T Arquitectura y Civil EstructuralJUAN CARLOS BIBIANO BEDOLLAPas encore d'évaluation
- Diseno y Construccion de Una Maquina PerforadoraDocument167 pagesDiseno y Construccion de Una Maquina PerforadoraGabriel0% (1)
- Soldadura MejiaDocument28 pagesSoldadura MejiaMilton AlfaroPas encore d'évaluation
- Reporte y Cuestionario de Laboratorio de Fisica IIDocument29 pagesReporte y Cuestionario de Laboratorio de Fisica IIYves MQPas encore d'évaluation
- Triangulo de Potencia AlternaDocument5 pagesTriangulo de Potencia AlternaFrancisco GonzalezPas encore d'évaluation
- Programacion EstructuradaDocument12 pagesProgramacion EstructuradaVirgilio DiazPas encore d'évaluation
- Operadores Matemáticos en VBA PDFDocument15 pagesOperadores Matemáticos en VBA PDFLuisc CaicedomPas encore d'évaluation
- Propiedades Reológicas de FluidosDocument21 pagesPropiedades Reológicas de FluidosTahic P100% (1)
- Othello Sample in PascalDocument7 pagesOthello Sample in PascalYonaton_1Pas encore d'évaluation
- Elavoracion de Adicional de Obra Del Colegio Juan Jose Crespo y Castillo de HuanucoDocument190 pagesElavoracion de Adicional de Obra Del Colegio Juan Jose Crespo y Castillo de HuanucoArnaldo Julio Reyes RomuchoPas encore d'évaluation
- Catálogo de Texturas ÍgneasDocument15 pagesCatálogo de Texturas ÍgneasFranco Galarce ArenasPas encore d'évaluation
- Laboratorio9 Hidraulica TerminadoDocument15 pagesLaboratorio9 Hidraulica TerminadoBruno Polanco PezoPas encore d'évaluation
- Metalografía CuantitativaDocument10 pagesMetalografía CuantitativaEdilson Sarmiento AlonsoPas encore d'évaluation
- Ing - Produccion Tubing ConcentricoDocument83 pagesIng - Produccion Tubing ConcentricoSanthy MorejónPas encore d'évaluation
- Viscosimetro Burbujas PDFDocument3 pagesViscosimetro Burbujas PDFSpliner AvilaPas encore d'évaluation
- HT-Raloy Diesel Serie 5 Plus SAE 50 CF2Document1 pageHT-Raloy Diesel Serie 5 Plus SAE 50 CF2Sebastian Eduardo Nestoso LazaroPas encore d'évaluation
- Aeropuertos Capitulo 7 Caracteristicas Fisicas de Las Calles de RodajeDocument21 pagesAeropuertos Capitulo 7 Caracteristicas Fisicas de Las Calles de RodajeJohn Nelo Aruquipa MPas encore d'évaluation
- Tipos y Características de Las ArmadurasDocument9 pagesTipos y Características de Las Armadurassamir0504Pas encore d'évaluation