Vous aimerez peut-être aussi
- Informe de TopografiaDocument11 pagesInforme de TopografiaRoberto PitaPas encore d'évaluation
- Practicas #02-Levan GPSDocument17 pagesPracticas #02-Levan GPSJuan TCPas encore d'évaluation
- Informe de Vista Alegre - Cerro Vista Alegre HeydiDocument15 pagesInforme de Vista Alegre - Cerro Vista Alegre HeydiYiye Jencarlos Hurtado Berrospi100% (3)
- Trabajo Escrito GpsDocument9 pagesTrabajo Escrito GpsF Ricardo Pinto100% (1)
- Topografía GpsDocument39 pagesTopografía GpsLuis Miguel Peña ValeroPas encore d'évaluation
- Monografia GPS DiferencialDocument10 pagesMonografia GPS DiferencialRnzo Schänder Rvros67% (3)
- IntroducciónDocument13 pagesIntroducciónRuben RivasPas encore d'évaluation
- 14 Sistema de Posicionamiento GlobalDocument12 pages14 Sistema de Posicionamiento Globaloscar mamaniPas encore d'évaluation
- Por Qué Utilizar Satélites para El MapeoDocument12 pagesPor Qué Utilizar Satélites para El MapeojorgePas encore d'évaluation
- Informe de Gnss FinalDocument22 pagesInforme de Gnss FinalSting J. SC50% (2)
- Marco TeoricoDocument8 pagesMarco TeoricoValentino RickyPas encore d'évaluation
- Sistema de Posicionamiento GlobalDocument8 pagesSistema de Posicionamiento GlobalArlan Sanchez MontenegroPas encore d'évaluation
- Manual de Agricultura de PrecisionDocument45 pagesManual de Agricultura de PrecisionMerlyMardelyPas encore d'évaluation
- Teoría 09. Raro El Sistema GPSDocument8 pagesTeoría 09. Raro El Sistema GPSGerson ArbildoPas encore d'évaluation
- Inv. Tema 4 Luis Aldair Pérez JiménezDocument29 pagesInv. Tema 4 Luis Aldair Pérez JiménezAldair PJPas encore d'évaluation
- Tipos de Levantamiento Con Gps DiferencialDocument10 pagesTipos de Levantamiento Con Gps DiferencialChardin Castillo QuispePas encore d'évaluation
- "Año de La Lucha Contra La Corrupción E Impunidad " Universidad Nacional de San Martín Facultad de Ciencias Agrarias Escuela Profesional de AgronomíaDocument5 pages"Año de La Lucha Contra La Corrupción E Impunidad " Universidad Nacional de San Martín Facultad de Ciencias Agrarias Escuela Profesional de AgronomíaAngel Gabriel López CamposPas encore d'évaluation
- EL GPS DetalladoDocument4 pagesEL GPS Detalladojuan carlosPas encore d'évaluation
- Levantamiento Con GPS NavegadorDocument12 pagesLevantamiento Con GPS NavegadorDaniela PortilloPas encore d'évaluation
- El GPSDocument5 pagesEl GPSCESAR AUGUSTO DELGADO FIGUEROAPas encore d'évaluation
- Practica 7Document13 pagesPractica 7P Herminio SabinoPas encore d'évaluation
- Informe de CartoDocument16 pagesInforme de CartoAnonymous 7UPqHKPas encore d'évaluation
- Practica 7Document13 pagesPractica 7P Herminio SabinoPas encore d'évaluation
- GPS Navstar, Galileo y GlomasDocument15 pagesGPS Navstar, Galileo y GlomasSaul Dionisio AcuñaPas encore d'évaluation
- Curso Gps NavegadorDocument36 pagesCurso Gps NavegadorCastillo VigilPas encore d'évaluation
- Navegación ElectrónicaDocument4 pagesNavegación ElectrónicaMaria Fernanda Avendaño MendozaPas encore d'évaluation
- Clases GPSDocument13 pagesClases GPSJahir MaguiñaPas encore d'évaluation
- GPS y sistemas de coordenadas para geodesiaDocument14 pagesGPS y sistemas de coordenadas para geodesiaGuzman JosePas encore d'évaluation
- Ensayo Sobre Aplicaciones de Posicionamiento GlobalDocument8 pagesEnsayo Sobre Aplicaciones de Posicionamiento GlobalHiram GonzalezPas encore d'évaluation
- Manejo de GpsDocument15 pagesManejo de GpsDianny860% (1)
- TP 5Document13 pagesTP 5Arian VallejoPas encore d'évaluation
- Cap Xi - Sistema de Posicionamiento GlobalDocument24 pagesCap Xi - Sistema de Posicionamiento GlobalLUIS MIGUEL HUAMANI MAQUERAPas encore d'évaluation
- GpsDocument26 pagesGpsalonsoPas encore d'évaluation
- TRACKLOGDocument7 pagesTRACKLOGPercy Flores DiazPas encore d'évaluation
- Sistema de Posicionamiento Global (GPS) PDFDocument14 pagesSistema de Posicionamiento Global (GPS) PDFJEDUZOR OrozcoPas encore d'évaluation
- Trabajo Con GpsDocument13 pagesTrabajo Con GpsFélix Quispe YucraPas encore d'évaluation
- Proyecto GpsDocument86 pagesProyecto GpsFelipe Guajardo PérezPas encore d'évaluation
- Herramientas GeograficasDocument6 pagesHerramientas GeograficasdanielaPas encore d'évaluation
- TEMA 4 Topografia AplicadaDocument12 pagesTEMA 4 Topografia AplicadaTERESA MAYPas encore d'évaluation
- APUNTESDocument52 pagesAPUNTESMarie.Pas encore d'évaluation
- GPS-SistemaDocument29 pagesGPS-SistemaNilton Poma PaucarPas encore d'évaluation
- Funcion Media-Geodesia SatelitalDocument21 pagesFuncion Media-Geodesia SatelitalTom Sanchez DiazPas encore d'évaluation
- Unidad 4 33Document20 pagesUnidad 4 33Daniel Gomez100% (2)
- El GPS Aplicado A La TopografiaDocument59 pagesEl GPS Aplicado A La TopografiaJhodap PePas encore d'évaluation
- Taller Uso GPSDocument8 pagesTaller Uso GPSToni MartínezPas encore d'évaluation
- Sistema de Posicionamiento GlobalDocument71 pagesSistema de Posicionamiento GlobalANA TOÑO BULUXPas encore d'évaluation
- MARCO TEÓRICO GpsDocument3 pagesMARCO TEÓRICO GpsDavid Hernandez Linares0% (1)
- Geodesia Fijas FinalDocument6 pagesGeodesia Fijas FinalYhon Eliot Leon SPas encore d'évaluation
- Lab GeoDocument10 pagesLab GeoLiceth PascalPas encore d'évaluation
- El GPSDocument19 pagesEl GPSAlberto Gallardo QuispePas encore d'évaluation
- CAPITULO 3 Recursos Digitales de TopografíaDocument30 pagesCAPITULO 3 Recursos Digitales de TopografíaOscar ProañoPas encore d'évaluation
- Informe TopografiaDocument27 pagesInforme TopografiaJHONY ALEXANDER GOMEZ CALSINPas encore d'évaluation
- Topografia-Unidad 4-Esmeralda de Jesus Guerra EstradaDocument13 pagesTopografia-Unidad 4-Esmeralda de Jesus Guerra EstradaEsmeralda De Jesús Guerra EstradaPas encore d'évaluation
- GPS Geodesia SatelitalDocument50 pagesGPS Geodesia SatelitalCarol Luz Chavez Chambilla100% (1)
- Proyecto de Levantamiento Con GPS1Document50 pagesProyecto de Levantamiento Con GPS1FRANKLIN REMY FARIAS NOLEPas encore d'évaluation
- INFORMEDocument9 pagesINFORMEGian Marco Romero CastilloPas encore d'évaluation
- GPS: Sistema de posicionamiento globalDocument12 pagesGPS: Sistema de posicionamiento globalRodnyPas encore d'évaluation
- Sistema de Posicioamiento y La Estacion Total PDFDocument54 pagesSistema de Posicioamiento y La Estacion Total PDFDeyvi ChitePas encore d'évaluation
- Trazar el mapa de un bosque o campo: Diseñar fácilmente un plan 3D para un parque de atracciones, un circuito de cuerdas, una casaD'EverandTrazar el mapa de un bosque o campo: Diseñar fácilmente un plan 3D para un parque de atracciones, un circuito de cuerdas, una casaPas encore d'évaluation
- Cebolla FinDocument17 pagesCebolla FinCarmen Villegas GermànPas encore d'évaluation
- Informe PresasDocument10 pagesInforme PresasCarmen Villegas GermànPas encore d'évaluation
- Capitulo 22 ExposiciónDocument16 pagesCapitulo 22 ExposiciónCarmen Villegas GermànPas encore d'évaluation
- Informe Analisis de Calidad de SemillaDocument14 pagesInforme Analisis de Calidad de SemillaCarmen Villegas GermànPas encore d'évaluation
- Morfología, fisiología, fenología y taxonomía de la papa (Solanum tuberosum): Variedades y papas nativasDocument23 pagesMorfología, fisiología, fenología y taxonomía de la papa (Solanum tuberosum): Variedades y papas nativasCarmen Villegas GermànPas encore d'évaluation
- Informe DanyerDocument13 pagesInforme DanyerCarmen Villegas GermànPas encore d'évaluation
- Morfología y Biologia Floral Del ArrozDocument18 pagesMorfología y Biologia Floral Del ArrozCarmen Villegas Germàn100% (3)
- Semana 9. Metabolismo de Los Ácidos Grasos, Biosíntesis de Fosfolípidos, Glicólipidos, Colesterol.Document69 pagesSemana 9. Metabolismo de Los Ácidos Grasos, Biosíntesis de Fosfolípidos, Glicólipidos, Colesterol.Carmen Villegas GermànPas encore d'évaluation
- Nativos Del PeruDocument5 pagesNativos Del PeruCarmen Villegas GermànPas encore d'évaluation
- Inst. de Parderas InformeDocument9 pagesInst. de Parderas InformeCarmen Villegas GermànPas encore d'évaluation
- Capitulo 22 ExposiciónDocument16 pagesCapitulo 22 ExposiciónCarmen Villegas GermànPas encore d'évaluation
- 2 Clase 4unidad - Camote y Productos Almacenados 2015 Ok OkDocument64 pages2 Clase 4unidad - Camote y Productos Almacenados 2015 Ok OkCarmen Villegas GermànPas encore d'évaluation
- Examen de Mecanizacion Iii Unidad UntDocument3 pagesExamen de Mecanizacion Iii Unidad UntCarmen Villegas GermànPas encore d'évaluation
- MutacionesDocument15 pagesMutacionesCarmen Villegas GermànPas encore d'évaluation
- Insectos Plaga Leguminosas 2016Document102 pagesInsectos Plaga Leguminosas 2016Carmen Villegas Germàn100% (1)
- Diapositivas de GeneticaDocument17 pagesDiapositivas de GeneticaCarmen Villegas GermànPas encore d'évaluation
- AaaDocument1 pageAaaCarmen Villegas GermànPas encore d'évaluation
- Transcripción Del AdnDocument8 pagesTranscripción Del AdnCarmen Villegas GermànPas encore d'évaluation
- 1Document1 page1Carmen Villegas GermànPas encore d'évaluation
- GatDocument1 pageGatCarmen Villegas GermànPas encore d'évaluation
- Clase 3 Relacion Hospedante PatogenoDocument63 pagesClase 3 Relacion Hospedante PatogenoNayibe Garzòn100% (1)
- Imagen de JesusDocument1 pageImagen de JesusCarmen Villegas GermànPas encore d'évaluation
- Fotosintesis I CDocument44 pagesFotosintesis I CCarmen Villegas GermànPas encore d'évaluation
- Tractor AgricolaDocument34 pagesTractor AgricolaCarmen Villegas GermànPas encore d'évaluation
- Fotosiintesis II 2012-CDocument26 pagesFotosiintesis II 2012-CCarmen Villegas GermànPas encore d'évaluation
- 6th Central Pay Commission Salary CalculatorDocument15 pages6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- Informe N°2 MaquinariaDocument24 pagesInforme N°2 MaquinariaCarmen Villegas GermànPas encore d'évaluation
- 01 - INTRODUCCIÓN A La FitopatologisDocument52 pages01 - INTRODUCCIÓN A La FitopatologisCarmen Villegas GermànPas encore d'évaluation
- Riegossss AgrotecniaDocument36 pagesRiegossss AgrotecniaCarmen Villegas GermànPas encore d'évaluation
- 6th Central Pay Commission Salary CalculatorDocument15 pages6th Central Pay Commission Salary Calculatorrakhonde100% (436)
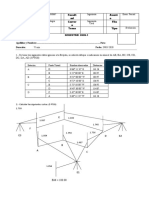
- Topografia Tarea 1Document3 pagesTopografia Tarea 1stalinPas encore d'évaluation
- Lineamientos para La Entrega de Información Topográfica A La Secretería de Infraestructura de PereiraDocument15 pagesLineamientos para La Entrega de Información Topográfica A La Secretería de Infraestructura de PereiraDarwins CortesPas encore d'évaluation
- Chasco CDocument10 pagesChasco CnurrybelPas encore d'évaluation
- Accion Geologica Del MarDocument19 pagesAccion Geologica Del MarRobinsson Morales Asencios100% (1)
- Guia Descubrimiento 1 5 BasicoDocument8 pagesGuia Descubrimiento 1 5 Basicolotita23Pas encore d'évaluation
- Tesis - Mineria Metalica Geografia Mexico Sol - PerezDocument298 pagesTesis - Mineria Metalica Geografia Mexico Sol - PerezFrancoPaúlTafoyaGurtz100% (1)
- 5 IED05 Estudios Topograficos 007Document7 pages5 IED05 Estudios Topograficos 007Frank Aragón GarciaPas encore d'évaluation
- Monografía Del Estado de Sonora.Document4 pagesMonografía Del Estado de Sonora.EXAMEN 201550% (2)
- Educacion AmbientalDocument12 pagesEducacion AmbientalGerardo BarillasPas encore d'évaluation
- Palabras de Despedida 6Document16 pagesPalabras de Despedida 6Jan JoliePas encore d'évaluation
- Guía No. 1 Aspectos Generales de Las Ciencias Geográficas - La Tierra en El UniversoDocument12 pagesGuía No. 1 Aspectos Generales de Las Ciencias Geográficas - La Tierra en El UniversoYubelkys DiazPas encore d'évaluation
- 2.2. Consideraciones Sobre Lo Rural-Urbano y El Planteamiento de Un Nuevo Enfoque - La NuevaDocument6 pages2.2. Consideraciones Sobre Lo Rural-Urbano y El Planteamiento de Un Nuevo Enfoque - La NuevaMiguel SolisPas encore d'évaluation
- Programación anual Geografía 1° SecundariaDocument3 pagesProgramación anual Geografía 1° SecundariaCoroise Arequipa AjorcaPas encore d'évaluation
- Proyecciones Cartográficas: Tipos y CaracterísticasDocument25 pagesProyecciones Cartográficas: Tipos y Característicassebastian avellanedaPas encore d'évaluation
- Temario Heymfer ExcobaDocument19 pagesTemario Heymfer ExcobaPzliu GR100% (1)
- Examen Parcial de Topografía-Convertido RodrigoDocument4 pagesExamen Parcial de Topografía-Convertido RodrigoRenzo Chuquilin GarciaPas encore d'évaluation
- Diagnostico de Brechas - Sector Agricultura 2020Document16 pagesDiagnostico de Brechas - Sector Agricultura 2020WILFREDO PARI TAIPEPas encore d'évaluation
- Ciencias: SocialesDocument60 pagesCiencias: SocialesedwincfgPas encore d'évaluation
- Región naturales de ColombiaDocument3 pagesRegión naturales de ColombiaAlam Keily RuizPas encore d'évaluation
- Desarrollo Territorial Sostenible Y Alianzas Público/PrivadaDocument62 pagesDesarrollo Territorial Sostenible Y Alianzas Público/PrivadadianePas encore d'évaluation
- El Niño Es Un Fenómeno Oceánico-Atmosférico Que OcurreDocument6 pagesEl Niño Es Un Fenómeno Oceánico-Atmosférico Que OcurreAntonio Gredil PerezPas encore d'évaluation
- Catastro DiapositivasDocument10 pagesCatastro DiapositivasJuan sebastian castellanosPas encore d'évaluation
- Tarja (Jujuy, 1955-1960) : La Cultura de Los BordesDocument24 pagesTarja (Jujuy, 1955-1960) : La Cultura de Los BordesFlordecactusPas encore d'évaluation
- CLAVE Examen Carto IIDocument2 pagesCLAVE Examen Carto IIRaul100% (1)
- Climas del PerúDocument2 pagesClimas del PerúJessica Kimberly Verastegui VelasquezPas encore d'évaluation
- Transforma UTM a topográficaDocument53 pagesTransforma UTM a topográficaMARCO ANTONIO LUIS RAMIREZPas encore d'évaluation
- Qué Es La Longitud para Cuarto de PrimariaDocument6 pagesQué Es La Longitud para Cuarto de PrimariaQuispe Quispe Gladys0% (1)
- Memoria Descriptiva - C.S. MariasDocument4 pagesMemoria Descriptiva - C.S. MariasM3Ss1 V3Rg4L4RG4Pas encore d'évaluation
- Dialnet GeografiaElectoralConsideracionesTeoricasParaElCas 4013086Document499 pagesDialnet GeografiaElectoralConsideracionesTeoricasParaElCas 4013086Fidel Terenciano FilhoPas encore d'évaluation
- Diferencias entre países desarrollados y subdesarrolladosDocument17 pagesDiferencias entre países desarrollados y subdesarrolladosFernandoGlez100% (1)