International Journal of Mechanical Engineering and Technology (IJMET)
Volume 7, Issue 2, March-April 2016, pp. 168176, Article ID: IJMET_07_02_018
Available online at
http://www.iaeme.com/IJMET/issues.asp?JType=IJMET&VType=7&IType=2
Journal Impact Factor (2016): 9.2286 (Calculated by GISI) www.jifactor.com
ISSN Print: 0976-6340 and ISSN Online: 0976-6359
IAEME Publication
FORCE CALCULATION IN UPRIGHT OF A
FSAE RACE CAR
Anshul Dhakar and Rishav Ranjan
Department of Mechanical Engineering,
RV College of Engineering,
Bangalore, India
ABSTRACT
Forces are generated at the tire contact patch during various maneuvers
of the car and transferred to the chassis through the suspension links.
Calculating the forces on every link is important to design the suspension
system as all the forces from wheel to the chassis are transferred by the
suspension linkages. These forces have been calculated for all the links of a
double wishbone suspension geometry. The load paths and FBD have been
drawn and axial stress in the all the linkages.
Key words: Analysis of wish-bones, Upright, FSAE, Tire-data, etc.
Cite this Article Anshul Dhakar and Rishav Ranjan, Force Calculation In
Upright of A FSAE Race Car. International Journal of Mechanical
Engineering and Technology, 7(2), 2016, pp. 168176.
http://www.iaeme.com/currentissue.asp?JType=IJMET&VType=7&IType=2
1. INTRODUCTION
Upright is a part of the wheel assembly which holds the hub and allows rotation of the
wheel. The forces from the tire contact patch are transmitted by the upright to the
suspension links.
The suspension geometry of a standard FSAE race car has been used for the
calculation of the forces. The target values for concerning and braking have been set
according to the tracks present in the FSAE International events. Tire data has been
used to find out the friction coefficient at the contact patch which varies to the normal
load on it.
The calculation of forces has been done in matrix form using MS Excel. The Free
body diagram of the corner assembly and all the linkages are made.
http://www.iaeme.com/IJMET/index.asp
168
editor@iaeme.com
Force Calculation In Upright of A FSAE Race Car
2. FORCE CALCULATION
For the calculation of loads and load paths in wheel assembly, we need to take
parameters from the geometry of the car, the track and the procured components such
as Tire-data.
The following data have been obtained from standard FSAE race car:
Table1 Data from Suspension Geometry
The accleration during various actions of the car (i.e. braking, cornering and
throttling) are calculated using three equations of motion, considering accleration as
constant through out the particular event.
Table 2 Data from FSAE track
http://www.iaeme.com/IJMET/index.asp
169
editor@iaeme.com
Anshul Dhakar and Rishav Ranjan
The braking acceleration is calculated when the car de-accelerates from a speed of
60kmph to 0kmph in a braking distance of half the skid-pad circumference. Similarly,
lateral acceleration is calculated assuming the maximum cornering speed as 40kmph
and a lateral acceleration of around 1.4g has been obtained. The various speeds
assumed are from standard FSAE race cars participating in the event.
The coefficient of friction has been obtained from tire data which varies according
to the normal load on the tire (FZ).
2.1. Calculation of the forces during various maneuvers
The upright takes longitudinal force during braking and acceleration, and lateral
forces during cornering. Hence, extreme forces are considered for a situation, when
the car brakes during cornering. The total amount of traction is considered constant.
The Circle of Traction shows the total amount of traction distributed between lateral
forces and longitudinal forces.
2.1.1 Longitudinal Force Calculation
The longitudinal forces are developed by an upright during acceleration and
deceleration. It is evident that a driver experience more gs of force during
deceleration (braking). The mass transfer during braking has been calculated using the
following equation:
(Mass Transfer) * g * Wheel Base = (Mass of the Car) * Braking gs * g * Centre of
Gravity (Z).
The coefficient of friction is a variable obtained from the tire data which depends
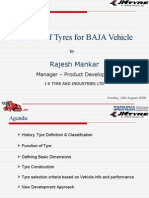
on the net normal force, FZ after mass transfer. The system is considered as a beam
with Frictional Force and the reaction forces on upright.
Figure 1 FBD during Braking (Side View)
The distances between the reaction forces and frictional force is obtained from the
Suspension Geometry and Tire Specifications (such as Tire Diameter, Aspect Ratio,
etc.)
The equations were put in MS Excel and the longitudinal forces during braking
were obtained in the following table:
http://www.iaeme.com/IJMET/index.asp
170
editor@iaeme.com
Force Calculation In Upright of A FSAE Race Car
Table 3 Braking Force
2.1.2 Lateral Force Calculation
The lateral forces are developed by an upright during cornering or while steering. The
mass transfer during cornering has been calculated using the following equation:
(Mass Transfer) * g * Track Width = (Mass of the Car) * Cornering gs * g * Centre of
Gravity (Z).
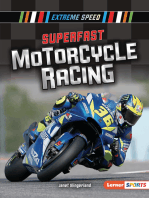
Since the track-width of front and rear are different the load transfer is different in
both cases. The reaction forces here as well is calculated considering beam structure.
And the distances were again taken from the data extracted (Tire Data, Suspension
Geometry, etc.)
Figure 2 FBD during cornering (Front View)
http://www.iaeme.com/IJMET/index.asp
171
editor@iaeme.com
Anshul Dhakar and Rishav Ranjan
The following table lists the net lateral forces on upright outboard points:
Table 4 Lateral Force
2.1.3 Forces during extreme maneuvers
During braking, throttling and steering actions of the car, the maximum forces
developed on an upright is when the car applies brake while steering. So the upright is
designed for the above mentioned condition in which net transfer of mass is
considered to calculate the force vector at the tire contact patch.
Table 5 Braking and Cornering Mass Transfer
3. LINKAGES FORCE
The linkages in a corner of a FSAE race car consists of two wish-bones having four
links, a tie/toe rod and a push/pull rod. The tire forces are transferred to the links
through upright. Since there are no bending forces, axial forces are developed in all
linkages.
http://www.iaeme.com/IJMET/index.asp
172
editor@iaeme.com
Force Calculation In Upright of A FSAE Race Car
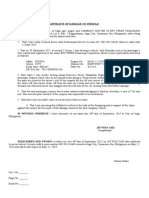
Figure 2 Linkages in a corner of car
The unit vectors are calculated for every link and the tire forces are distributed in
the Cartesian plane and directional vector ratios. For calculating the unit vectors of the
link, the data have been taken from suspension geometry of a FSAE race car.
Table 6 Data from suspension geometry
http://www.iaeme.com/IJMET/index.asp
173
editor@iaeme.com
Anshul Dhakar and Rishav Ranjan
Table 7 Unit vectors
The number of links is equal to the number of column in the matrix. The solution
of the matrix results in the axial force in the linkages.
Figure 3 Matrix array
Putting the value of the tire forces obtained from the force calculations in this
matrix on RHS, we will get the axial forces in the linkages. The calculation were done
in MS Excel taking the data from suspension geometry for both front and rear
linkages. The corresponding Force-Moment Matrix is formulated as follows in all the
six links:
Table 8 Force-Moment Matrix
http://www.iaeme.com/IJMET/index.asp
174
editor@iaeme.com
Force Calculation In Upright of A FSAE Race Car
The material used for the link have the following dimensions and material properties:
Table 9 Data of tube used
Axial stress in all the linkages were calculated and then factor of safety considering
the buckling load.
Table 10 Linkages Force (Front)
Table 11 Linkages Force (Rear)
4. CONCLUSIONS
A mathematical model has been generated in MS Excel which can be used for any
suspension geometry just by changing the coordinates of the suspension point and
other vehicle parameters such as mass of the car, center of gravity distance, weight
bias etc. Matrix method has been developed to calculate the forces on all the links.
Factor of safety for each link has been calculated by using the forces obtained by unit
matrix method. These forces are essential to design the upright and other suspension
components such as upright clamps, bell cranks, hubs for any car using double wishbone suspension.
ACKNOWLEDGMENTS
Acknowledge with thanks to Ashwa Racing, a project of Department of Mechanical
Engineering, RV College of Engineering, Bengaluru for guiding in the progress of our
project.
http://www.iaeme.com/IJMET/index.asp
175
editor@iaeme.com
Anshul Dhakar and Rishav Ranjan
REFERENCES
[1]
[2]
[3]
[4]
[5]
[6]
[7]
[8]
[9]
[10]
[11]
[12]
[13]
[14]
[15]
[16]
[17]
[18]
Andrzejewski, R., and Awrejcewicz, J., Nonlinear Dynamics of a Wheeled
Vehicle, Springer-Verlag, New York, 2005.
Haney, P., The Racing and HighPerformance Tire, SAE Inc, 2003.
Ellis, J. R., Vehicle Handling Kinematics, Mechanical Engineering
Publications Limited, London, 1994.
Milliken, W. F., and Milliken, D. L., Race Car Vehicle Dynamics, SAE Inc.
Milliken, 1995.
Freeman B, October, Steering System and Suspension Design for a Formula
SAE-A Racer. University of Southern Queensland, 2006.
Norbe, J. P., The Car and its Wheels, A Guide to Modern Suspension Systems,
TAB Books Inc, 1980.
Wong, J. Y., Theory of Ground Vehicles, John Wiley & Sons, New York,
2001.
Cossalter, V., Motorcycle Dynamics, Race Dynamic Publishing, Greendale,
WI, 2002.
Pathri Bhargav Prajwal, Design Optimization of Formula One Student Sports
Car Upright Using Hyper mesh , ISSN No. 2231 6477, Vol-2, Issue-1, 2012
Anudeep Reddy Dyapa and Vishal Shenoy, Design and Analysis of Upright of
an FIA Regulated Cruiser Class Solar Electric Vehicle, International Journal of
Engineering Research & Technology (IJERT) ISSN: 2278-0181, October- 2014
Andrew Jen Wong, Design and Optimization of Upright Assemblies for
Formula SAE Racecar, International Journal of Mechanical and Industrial
Engineering (IJMIE), ISSN No. 2231 6477, Vol-2, Issue-1, 2012, March 2007.
Beatty,M. F., Principles of Engineering Mechanics, Vol. 1, Kinematics- The
Geometry of Motion, Plenum Press, New York, 1986.
Hartenberg, R. S., and Denavit, J., Kinematic Synthesis of Linkages, McGrawHill Book Co, 1964.
Milliken, W. F., and Milliken, D. L., Chapter 16, Race Car Vehicle Dynamics,
SAE Inc, 1994.
Duygu GLER, Dynamic Analysis of Double Wishbone Suspension, The
Graduate School of Engineering and Sciences of zmir Institute of Technology,
July 2006.
Ylber Shabani, Shaqir Elezaj, Naser Lajqi and Shpetim Lajqi, Application of
Diagnostic Methods For The Rear Drive Axle of The Passenger Cars.
International Journal of Mechanical Engineering and Technology, 4(6), 2013,
pp. 214222
Keshav Jha, Sai Phanindra Dinesh Kakarlamudi, Bharath Konduru, Mukesh
Reddy Vadala, Shravani Rallapati, Sonu Gupta And Chanikya Virugadinla,
Design And Fabrication of Radio Controlled Car. International Journal of
Mechanical Engineering and Technology, 6(8), 2015, pp. 0111.
Dr. Blent YARDIMOLU, Dynamic Analysis of Double Wishbone
Suspension, the Graduate School of Engineering and Sciences of zmir Institute
of Technology, July 2006.
http://www.iaeme.com/IJMET/index.asp
176
editor@iaeme.com
Vous aimerez peut-être aussi
- The Design of Formula SAE Half Shafts For Optimum Vehicle AccelerationDocument8 pagesThe Design of Formula SAE Half Shafts For Optimum Vehicle AccelerationRitwik DasPas encore d'évaluation
- Fsae Design Suspension Components PDFDocument13 pagesFsae Design Suspension Components PDFKingsley AyascaPas encore d'évaluation
- 09 Suspension ConceptsDocument33 pages09 Suspension Conceptskaka1211402Pas encore d'évaluation
- Test Rig For Shock AbsorberDocument15 pagesTest Rig For Shock AbsorberRajaSekarsajja100% (1)
- Fsae Suspension Design LawrenceDocument7 pagesFsae Suspension Design LawrenceAbhishek Dixit100% (1)
- FSAE Drivetrain Final PresentationDocument38 pagesFSAE Drivetrain Final PresentationAndreea CotunPas encore d'évaluation
- Kinematic and Dynamic Analysis of Independent Suspension SystemDocument9 pagesKinematic and Dynamic Analysis of Independent Suspension Systemsiddhartha180987100% (3)
- Anty Lock Braking System (For Seminar)Document16 pagesAnty Lock Braking System (For Seminar)ankitkakkar9113Pas encore d'évaluation
- Car Suspension - An Introduction!Document54 pagesCar Suspension - An Introduction!Siddharth Garkhail100% (1)
- FSAE SuspensionDocument37 pagesFSAE SuspensionDonald MuchemwaPas encore d'évaluation
- PCET-NMIET Department of Mechanical EngineeringDocument69 pagesPCET-NMIET Department of Mechanical Engineeringnikhil pandkarPas encore d'évaluation
- Design of Formula Student Racecar Brake SystemDocument15 pagesDesign of Formula Student Racecar Brake SystemVaibhavPas encore d'évaluation
- Suspension Design ProcedureDocument63 pagesSuspension Design ProcedurejalanayushPas encore d'évaluation
- Design and Analysis of Disc Brake and Caliper of Four WheelerDocument5 pagesDesign and Analysis of Disc Brake and Caliper of Four WheelerIJSTEPas encore d'évaluation
- Design - Report (PDR)Document8 pagesDesign - Report (PDR)Abhishek DixitPas encore d'évaluation
- Chassis 23 PDFDocument89 pagesChassis 23 PDFpartizan21Pas encore d'évaluation
- Design Considerations or Factors of A Two Wheeler SuspensionDocument44 pagesDesign Considerations or Factors of A Two Wheeler SuspensionViswaChaitanya Nandigam100% (2)
- Design of The WUFR-19 FSAE Suspension PDFDocument46 pagesDesign of The WUFR-19 FSAE Suspension PDFKetan JainPas encore d'évaluation
- Brake Force CalculationDocument25 pagesBrake Force CalculationVicky TjPas encore d'évaluation
- Drum Brake CalculationDocument3 pagesDrum Brake CalculationKarthigaiselvan Shanmuganathan100% (1)
- Objective:: Material Aluminium 7075 GradeDocument12 pagesObjective:: Material Aluminium 7075 Gradevishal yadav100% (1)
- Applied Vehicle Dynamics Seminar April 7-10, 2017 Sinhgad Technical Education Society - Pune, IndiaDocument2 pagesApplied Vehicle Dynamics Seminar April 7-10, 2017 Sinhgad Technical Education Society - Pune, IndiaPRAVEEN REDDY100% (1)
- Fsae DesignspecsDocument2 pagesFsae DesignspecsMari MuthuPas encore d'évaluation
- Design of Formula SAE Suspension ComponentsDocument13 pagesDesign of Formula SAE Suspension ComponentsYasser Rohom0% (1)
- Fsae DesignspecsDocument2 pagesFsae DesignspecsSureshMcPas encore d'évaluation
- Tubeless TyreDocument21 pagesTubeless Tyreujwaljaiswal100% (1)
- Suspension FEA AnalysisDocument153 pagesSuspension FEA AnalysishellomyfriendsPas encore d'évaluation
- Brake System Design PDFDocument10 pagesBrake System Design PDFaciddropsPas encore d'évaluation
- Research Paper SuspensionDocument7 pagesResearch Paper SuspensionAnirudh GuptaPas encore d'évaluation
- Computer Aided Design and Analysis of Disc Brake Rotors 2167 7670 1000144Document13 pagesComputer Aided Design and Analysis of Disc Brake Rotors 2167 7670 1000144A L Andriana SyaripPas encore d'évaluation
- Racecar DynamicsDocument14 pagesRacecar Dynamicsnemanjatopalovic1992Pas encore d'évaluation
- Design Optimization of Two Wheeler (Bike) ChassisDocument5 pagesDesign Optimization of Two Wheeler (Bike) ChassisPrakash KatdarePas encore d'évaluation
- Vehicle Responses To Cornering: The Wheel While CorneringDocument22 pagesVehicle Responses To Cornering: The Wheel While CorneringNemish KanwarPas encore d'évaluation
- Baja Sae TyreDocument43 pagesBaja Sae TyreSadia Khattak100% (1)
- FSAE Suspension OptimizationDocument32 pagesFSAE Suspension Optimizationisaiahfreerksen100% (1)
- Engine Design Report For Formula Student CompetitonDocument28 pagesEngine Design Report For Formula Student CompetitonNishant NaglePas encore d'évaluation
- Claude - FSS 1 W Methodology For Formula Student Suspension Kinematics DesignDocument55 pagesClaude - FSS 1 W Methodology For Formula Student Suspension Kinematics DesignSatvik Vatsa100% (2)
- Thesis Quarter Car ModelDocument138 pagesThesis Quarter Car Modelmme58105100% (2)
- Find Your Roll CenterDocument20 pagesFind Your Roll CenterchainplatesPas encore d'évaluation
- 2011 FSAE Design Spec Sheet: Car No. SchoolDocument5 pages2011 FSAE Design Spec Sheet: Car No. SchoolMohammad Parvez RazaPas encore d'évaluation
- 29 Ritsumeikanuniversity SpecsDocument2 pages29 Ritsumeikanuniversity SpecsMari MuthuPas encore d'évaluation
- 15 BAJA SuspensionDocument13 pages15 BAJA Suspensionkeval patel63% (8)
- Optimization of The Damper SettingsDocument42 pagesOptimization of The Damper SettingsAnderson MoribePas encore d'évaluation
- Dynamic Analysis of A Car Chassis PDFDocument5 pagesDynamic Analysis of A Car Chassis PDFsultanu89Pas encore d'évaluation
- Auto Transmission - NotesDocument34 pagesAuto Transmission - Notesvandanaharikumar100% (2)
- Brake CalculationsDocument15 pagesBrake CalculationsSaravanan Saran100% (2)
- Using Pacejka '89 and '94 ModelsDocument30 pagesUsing Pacejka '89 and '94 ModelsboopsubhaPas encore d'évaluation
- SAE BAJA ReportDocument30 pagesSAE BAJA ReportKaran GokaniPas encore d'évaluation
- 08a605 Vehicle Design IIDocument3 pages08a605 Vehicle Design IIdhana555Pas encore d'évaluation
- Chapter 5Document87 pagesChapter 5hadush gebrePas encore d'évaluation
- FSAE Damper Guide - Jim Kasprzak Kaz Tech TipDocument25 pagesFSAE Damper Guide - Jim Kasprzak Kaz Tech TipAlex BradleyPas encore d'évaluation
- Modeling of The Suspension of A Passenger Bus by Finite Element SoftwareDocument3 pagesModeling of The Suspension of A Passenger Bus by Finite Element SoftwarePrasad KhatiPas encore d'évaluation
- Kart Steering System Optimizing and SimulationDocument7 pagesKart Steering System Optimizing and Simulationgame_freakerboy_8346Pas encore d'évaluation
- DESIGN AND DEVELOPMENT OF A TRANSMISSION-with-cover-page-v2Document11 pagesDESIGN AND DEVELOPMENT OF A TRANSMISSION-with-cover-page-v2Maria Camila SantiagoPas encore d'évaluation
- Parametric Analysis of Four Wheel Vehicle Using Adams/Car: Jadav Chetan S. Patel Priyal RDocument6 pagesParametric Analysis of Four Wheel Vehicle Using Adams/Car: Jadav Chetan S. Patel Priyal RInternational Journal of computational Engineering research (IJCER)Pas encore d'évaluation
- Nav 009Document10 pagesNav 009Vishnu Vardhan Reddy YerasiPas encore d'évaluation
- L049062069 PDFDocument8 pagesL049062069 PDFSandra MarkivPas encore d'évaluation
- M Jayakumar Paper (17142691331)Document12 pagesM Jayakumar Paper (17142691331)N V DhandapaniPas encore d'évaluation
- Double WishboneDocument6 pagesDouble WishboneRian StevePas encore d'évaluation
- A Study On The Reasons For Transgender To Become EntrepreneursDocument7 pagesA Study On The Reasons For Transgender To Become EntrepreneursIAEME PublicationPas encore d'évaluation
- Voice Based Atm For Visually Impaired Using ArduinoDocument7 pagesVoice Based Atm For Visually Impaired Using ArduinoIAEME PublicationPas encore d'évaluation
- Determinants Affecting The User's Intention To Use Mobile Banking ApplicationsDocument8 pagesDeterminants Affecting The User's Intention To Use Mobile Banking ApplicationsIAEME PublicationPas encore d'évaluation
- Analyse The User Predilection On Gpay and Phonepe For Digital TransactionsDocument7 pagesAnalyse The User Predilection On Gpay and Phonepe For Digital TransactionsIAEME PublicationPas encore d'évaluation
- Impact of Emotional Intelligence On Human Resource Management Practices Among The Remote Working It EmployeesDocument10 pagesImpact of Emotional Intelligence On Human Resource Management Practices Among The Remote Working It EmployeesIAEME PublicationPas encore d'évaluation
- Visualising Aging Parents & Their Close Carers Life Journey in Aging EconomyDocument4 pagesVisualising Aging Parents & Their Close Carers Life Journey in Aging EconomyIAEME PublicationPas encore d'évaluation
- Broad Unexposed Skills of Transgender EntrepreneursDocument8 pagesBroad Unexposed Skills of Transgender EntrepreneursIAEME PublicationPas encore d'évaluation
- Modeling and Analysis of Surface Roughness and White Later Thickness in Wire-Electric Discharge Turning Process Through Response Surface MethodologyDocument14 pagesModeling and Analysis of Surface Roughness and White Later Thickness in Wire-Electric Discharge Turning Process Through Response Surface MethodologyIAEME PublicationPas encore d'évaluation
- A Study of Various Types of Loans of Selected Public and Private Sector Banks With Reference To Npa in State HaryanaDocument9 pagesA Study of Various Types of Loans of Selected Public and Private Sector Banks With Reference To Npa in State HaryanaIAEME PublicationPas encore d'évaluation
- Influence of Talent Management Practices On Organizational Performance A Study With Reference To It Sector in ChennaiDocument16 pagesInfluence of Talent Management Practices On Organizational Performance A Study With Reference To It Sector in ChennaiIAEME PublicationPas encore d'évaluation
- A Study On The Impact of Organizational Culture On The Effectiveness of Performance Management Systems in Healthcare Organizations at ThanjavurDocument7 pagesA Study On The Impact of Organizational Culture On The Effectiveness of Performance Management Systems in Healthcare Organizations at ThanjavurIAEME PublicationPas encore d'évaluation
- Gandhi On Non-Violent PoliceDocument8 pagesGandhi On Non-Violent PoliceIAEME PublicationPas encore d'évaluation
- A Study On Talent Management and Its Impact On Employee Retention in Selected It Organizations in ChennaiDocument16 pagesA Study On Talent Management and Its Impact On Employee Retention in Selected It Organizations in ChennaiIAEME PublicationPas encore d'évaluation
- Attrition in The It Industry During Covid-19 Pandemic: Linking Emotional Intelligence and Talent Management ProcessesDocument15 pagesAttrition in The It Industry During Covid-19 Pandemic: Linking Emotional Intelligence and Talent Management ProcessesIAEME PublicationPas encore d'évaluation
- Application of Frugal Approach For Productivity Improvement - A Case Study of Mahindra and Mahindra LTDDocument19 pagesApplication of Frugal Approach For Productivity Improvement - A Case Study of Mahindra and Mahindra LTDIAEME PublicationPas encore d'évaluation
- Optimal Reconfiguration of Power Distribution Radial Network Using Hybrid Meta-Heuristic AlgorithmsDocument13 pagesOptimal Reconfiguration of Power Distribution Radial Network Using Hybrid Meta-Heuristic AlgorithmsIAEME PublicationPas encore d'évaluation
- A Multiple - Channel Queuing Models On Fuzzy EnvironmentDocument13 pagesA Multiple - Channel Queuing Models On Fuzzy EnvironmentIAEME PublicationPas encore d'évaluation
- Role of Social Entrepreneurship in Rural Development of India - Problems and ChallengesDocument18 pagesRole of Social Entrepreneurship in Rural Development of India - Problems and ChallengesIAEME PublicationPas encore d'évaluation
- EXPERIMENTAL STUDY OF MECHANICAL AND TRIBOLOGICAL RELATION OF NYLON/BaSO4 POLYMER COMPOSITESDocument9 pagesEXPERIMENTAL STUDY OF MECHANICAL AND TRIBOLOGICAL RELATION OF NYLON/BaSO4 POLYMER COMPOSITESIAEME PublicationPas encore d'évaluation
- Various Fuzzy Numbers and Their Various Ranking ApproachesDocument10 pagesVarious Fuzzy Numbers and Their Various Ranking ApproachesIAEME PublicationPas encore d'évaluation
- Knowledge Self-Efficacy and Research Collaboration Towards Knowledge Sharing: The Moderating Effect of Employee CommitmentDocument8 pagesKnowledge Self-Efficacy and Research Collaboration Towards Knowledge Sharing: The Moderating Effect of Employee CommitmentIAEME PublicationPas encore d'évaluation
- A Proficient Minimum-Routine Reliable Recovery Line Accumulation Scheme For Non-Deterministic Mobile Distributed FrameworksDocument10 pagesA Proficient Minimum-Routine Reliable Recovery Line Accumulation Scheme For Non-Deterministic Mobile Distributed FrameworksIAEME PublicationPas encore d'évaluation
- Dealing With Recurrent Terminates in Orchestrated Reliable Recovery Line Accumulation Algorithms For Faulttolerant Mobile Distributed SystemsDocument8 pagesDealing With Recurrent Terminates in Orchestrated Reliable Recovery Line Accumulation Algorithms For Faulttolerant Mobile Distributed SystemsIAEME PublicationPas encore d'évaluation
- Financial Literacy On Investment Performance: The Mediating Effect of Big-Five Personality Traits ModelDocument9 pagesFinancial Literacy On Investment Performance: The Mediating Effect of Big-Five Personality Traits ModelIAEME PublicationPas encore d'évaluation
- Prediction of Average Total Project Duration Using Artificial Neural Networks, Fuzzy Logic, and Regression ModelsDocument13 pagesPrediction of Average Total Project Duration Using Artificial Neural Networks, Fuzzy Logic, and Regression ModelsIAEME PublicationPas encore d'évaluation
- Analysis of Fuzzy Inference System Based Interline Power Flow Controller For Power System With Wind Energy Conversion System During Faulted ConditionsDocument13 pagesAnalysis of Fuzzy Inference System Based Interline Power Flow Controller For Power System With Wind Energy Conversion System During Faulted ConditionsIAEME PublicationPas encore d'évaluation
- Quality of Work-Life On Employee Retention and Job Satisfaction: The Moderating Role of Job PerformanceDocument7 pagesQuality of Work-Life On Employee Retention and Job Satisfaction: The Moderating Role of Job PerformanceIAEME PublicationPas encore d'évaluation
- Moderating Effect of Job Satisfaction On Turnover Intention and Stress Burnout Among Employees in The Information Technology SectorDocument7 pagesModerating Effect of Job Satisfaction On Turnover Intention and Stress Burnout Among Employees in The Information Technology SectorIAEME PublicationPas encore d'évaluation
- A Review of Particle Swarm Optimization (Pso) AlgorithmDocument26 pagesA Review of Particle Swarm Optimization (Pso) AlgorithmIAEME PublicationPas encore d'évaluation
- Analysis On Machine Cell Recognition and Detaching From Neural SystemsDocument9 pagesAnalysis On Machine Cell Recognition and Detaching From Neural SystemsIAEME PublicationPas encore d'évaluation
- Buckeye PD Report: Teodulo Sánchez IncidentDocument12 pagesBuckeye PD Report: Teodulo Sánchez IncidentLatino RebelsPas encore d'évaluation
- Volvo v70 Xc70 Xc90 2003 SupplementDocument68 pagesVolvo v70 Xc70 Xc90 2003 SupplementVictor Gutiérrez MarcoletaPas encore d'évaluation
- Acoustic Devices Dispositivos AcústicosDocument4 pagesAcoustic Devices Dispositivos AcústicosMAX LEANDRO DE OLIVEIRAPas encore d'évaluation
- AMG BrochureDocument52 pagesAMG BrochureBarry KwokPas encore d'évaluation
- BMW F30 Coding CheatSheetDocument2 pagesBMW F30 Coding CheatSheetАрсений СтаркPas encore d'évaluation
- Asphalt 8 Car-File 2021Document10 pagesAsphalt 8 Car-File 2021mayehaPas encore d'évaluation
- 18MY Range Rover Evoque SpecificationDocument2 pages18MY Range Rover Evoque SpecificationNiket SinhaPas encore d'évaluation
- Estimasi B 2153 SIT-1Document2 pagesEstimasi B 2153 SIT-1Fastryan Ricko FardinandPas encore d'évaluation
- Peugeot 208 HandbookDocument332 pagesPeugeot 208 HandbooktareksobhPas encore d'évaluation
- 300 Series Euro 4 300 Euro 4 3616 (2007 and After)Document2 pages300 Series Euro 4 300 Euro 4 3616 (2007 and After)Yusuf VawdaPas encore d'évaluation
- IM TRIKE4in1 1912Document138 pagesIM TRIKE4in1 1912Aury DoePas encore d'évaluation
- 2014 LightingDocument27 pages2014 LightingimgtxPas encore d'évaluation
- Tesla PresentationDocument22 pagesTesla PresentationSavita Wadhawan100% (1)
- 2016 Mustang Alignment SpecsDocument3 pages2016 Mustang Alignment SpecsHENRYPas encore d'évaluation
- Car Battery MappingDocument3 pagesCar Battery Mappingsurez80Pas encore d'évaluation
- Evmpay ReportDocument18 pagesEvmpay ReportphilsonmanamelPas encore d'évaluation
- Ford Fiesta Specifications: Exterior DimensionsDocument2 pagesFord Fiesta Specifications: Exterior DimensionsBuhuntuUhuPas encore d'évaluation
- Automobile EngineeringDocument66 pagesAutomobile EngineeringRaj KapoorPas encore d'évaluation
- Vehicle Tech.Document2 pagesVehicle Tech.Ebubekir Buğra ÖzarslanPas encore d'évaluation
- Traffic Rules and FineDocument8 pagesTraffic Rules and FineNarayan VermaPas encore d'évaluation
- Jammer 2007 WebDocument172 pagesJammer 2007 WebArjuna PradoPas encore d'évaluation
- 2020 Can Am Off Road - Apache Track Kits Leaflet - enDocument7 pages2020 Can Am Off Road - Apache Track Kits Leaflet - enNicolas VillamayorPas encore d'évaluation
- Trailer Inspection Report FormDocument5 pagesTrailer Inspection Report FormyunanPas encore d'évaluation
- US Aprilia Caponord BrochureDocument7 pagesUS Aprilia Caponord BrochurePiaggioGroupAmericasPas encore d'évaluation
- Affidavit of Damage To VehicleDocument2 pagesAffidavit of Damage To Vehiclevhiena may estrelladoPas encore d'évaluation
- Uromac T-Rail RV - BrochureDocument2 pagesUromac T-Rail RV - BrochureCristiano RonaldoPas encore d'évaluation
- All New Yaris 2018 PDFDocument9 pagesAll New Yaris 2018 PDFJojo SosorodotanPas encore d'évaluation
- Montana, Silhouette & Venture: 1999 Chevrolet Venture LT 1999 Chevrolet Venture LTDocument9 pagesMontana, Silhouette & Venture: 1999 Chevrolet Venture LT 1999 Chevrolet Venture LTcarlosmhPas encore d'évaluation
- Vin Plate Decoding InformationDocument572 pagesVin Plate Decoding InformationRobert SimmonsPas encore d'évaluation
- CV Electronics Ltd. Plant, Agricultural & Municipal Remanufactured Parts CatalogueDocument24 pagesCV Electronics Ltd. Plant, Agricultural & Municipal Remanufactured Parts Cataloguemike kuhlmann0% (1)