Vous aimerez peut-être aussi
- HM150 19e1Document21 pagesHM150 19e1Javier Rocha100% (1)
- Axial Flow Impulse Turbine DemonstraitorDocument26 pagesAxial Flow Impulse Turbine DemonstraitorAt MuluPas encore d'évaluation
- Instruction Manual: Equipment For Engineering EducationDocument10 pagesInstruction Manual: Equipment For Engineering Educations_nimalanPas encore d'évaluation
- Instruction Manual: KI 120 Slotted Link ApparatusDocument5 pagesInstruction Manual: KI 120 Slotted Link Apparatuss_nimalanPas encore d'évaluation
- Nozzle Performance Study System: Technical DescriptionDocument2 pagesNozzle Performance Study System: Technical DescriptionSheikh IsmailPas encore d'évaluation
- ET102e - V0.9Document66 pagesET102e - V0.9Batyr SarsenovPas encore d'évaluation
- Instruction Manual: HM 290 Base Unit For TurbinesDocument78 pagesInstruction Manual: HM 290 Base Unit For Turbinesbeshir100% (1)
- Instruction Manual: WL 230 Condensation ProcessDocument48 pagesInstruction Manual: WL 230 Condensation ProcessSaba ArifPas encore d'évaluation
- Triaxial Compression Test 1978Document5 pagesTriaxial Compression Test 1978Alejandro425Pas encore d'évaluation
- Experiment Instructions: HM 284 Series and Parallel Connected PumpsDocument98 pagesExperiment Instructions: HM 284 Series and Parallel Connected PumpsDrEmadEl-SaidPas encore d'évaluation
- 690 RA3%2Baire%2Bacondicionado PDFDocument59 pages690 RA3%2Baire%2Bacondicionado PDFKaren Vintimilla100% (1)
- ET101e - V1.4Document82 pagesET101e - V1.4MintesinotPas encore d'évaluation
- Equipment For Engineering Education: G.U.N.T. Gerätebau GMBHDocument38 pagesEquipment For Engineering Education: G.U.N.T. Gerätebau GMBHmuluken walelgnPas encore d'évaluation
- Experiment # 15: LABORATORY MANUAL For ENGR2860U-Fluid MechanicsDocument10 pagesExperiment # 15: LABORATORY MANUAL For ENGR2860U-Fluid MechanicsAbdullah Alshihri100% (1)
- Experiment Instructions: HM150.06 Stability of A Floating BodyDocument12 pagesExperiment Instructions: HM150.06 Stability of A Floating Bodys_nimalanPas encore d'évaluation
- Rolling Disc Mass Moment InertiaDocument18 pagesRolling Disc Mass Moment InertiaShah NawazPas encore d'évaluation
- Experiment Instructions: HM 150.13 Methods of Flow MeasurementDocument30 pagesExperiment Instructions: HM 150.13 Methods of Flow MeasurementSwetha PatelPas encore d'évaluation
- Experiment Instructions: CE 283 Drum Cell FilterDocument20 pagesExperiment Instructions: CE 283 Drum Cell Filternash2000Pas encore d'évaluation
- Experiment Instructions: CE 220 Fluidised Bed FormationDocument51 pagesExperiment Instructions: CE 220 Fluidised Bed FormationRiccardo VianelloPas encore d'évaluation
- Soil Testing TriaxialDocument50 pagesSoil Testing TriaxialBekele AmanPas encore d'évaluation
- Venturi, Orifice, RotameterDocument34 pagesVenturi, Orifice, RotameterVinod VadithyaPas encore d'évaluation
- Hydrostatics TrainerDocument2 pagesHydrostatics TrainerJairo Martínez EscobarPas encore d'évaluation
- Modelling Ngong River Final Project 2010Document109 pagesModelling Ngong River Final Project 20101man1bookPas encore d'évaluation
- Heat Transfer QBDocument15 pagesHeat Transfer QBAsheesh KumarPas encore d'évaluation
- HM15013EDocument10 pagesHM15013EYoni EhmPas encore d'évaluation
- Dead Weight GaugecalibrationDocument3 pagesDead Weight Gaugecalibrationusman_uet08Pas encore d'évaluation
- Smoke TunnelDocument55 pagesSmoke TunnelABHIMANYU KHADGAPas encore d'évaluation
- Emissivity Measurement Apparatus (EES-HE-LH)Document53 pagesEmissivity Measurement Apparatus (EES-HE-LH)MRafayAmjadPas encore d'évaluation
- Deep Bed Filter Unit: Technical Teaching EquipmentDocument3 pagesDeep Bed Filter Unit: Technical Teaching EquipmentJennifer MaamaryPas encore d'évaluation
- The Reynolds AnalogyDocument4 pagesThe Reynolds AnalogyBhawani Pratap Singh PanwarPas encore d'évaluation
- Free and Forced Vortices PDFDocument6 pagesFree and Forced Vortices PDFdemisePas encore d'évaluation
- Structure Analysis Lab Subject Code:-Rce-453Document25 pagesStructure Analysis Lab Subject Code:-Rce-453Anubhav KumarPas encore d'évaluation
- Mech4620 Group 12 Report PDFDocument12 pagesMech4620 Group 12 Report PDFAaron Hoytash100% (1)
- Emissivity Measurement Apparatus 1Document7 pagesEmissivity Measurement Apparatus 1Nik SainiPas encore d'évaluation
- lab instru - exp 2 النهائيDocument10 pageslab instru - exp 2 النهائيsultan aliPas encore d'évaluation
- Experiment Instructions: Liquid-Liquid ExtractionDocument17 pagesExperiment Instructions: Liquid-Liquid ExtractionCarlos CortesPas encore d'évaluation
- Coventry UniversityDocument20 pagesCoventry UniversityDuncoh DunPas encore d'évaluation
- Combustion AssignmentDocument30 pagesCombustion AssignmentMichael AlvarezPas encore d'évaluation
- Radial Fan HM280e - V1.3Document94 pagesRadial Fan HM280e - V1.3muluken walelgn0% (1)
- Domlabmanualnew 110517072428 Phpapp02Document44 pagesDomlabmanualnew 110517072428 Phpapp02Mandeep Singh PundirPas encore d'évaluation
- Applied Mechanics Lab ManualDocument80 pagesApplied Mechanics Lab Manualbasakranjan50% (2)
- Force Balance Design For Educational Wind TunnelsDocument10 pagesForce Balance Design For Educational Wind Tunnelsnarien kondamPas encore d'évaluation
- Epicyclic Gear Train ApparatusDocument8 pagesEpicyclic Gear Train ApparatusGurmeet Mehma83% (6)
- Experimental Flume: Operation ManualDocument28 pagesExperimental Flume: Operation ManualUzair BukhariPas encore d'évaluation
- HM150 - 12e - V0.2Orifice Discharge ApparatusDocument25 pagesHM150 - 12e - V0.2Orifice Discharge Apparatusamanuelfitsum589Pas encore d'évaluation
- 1969 Physiolociical Reviewes Rheology of Blood MerrillDocument26 pages1969 Physiolociical Reviewes Rheology of Blood MerrillCelso Luis FilhoPas encore d'évaluation
- Lab Report Triffilliarc PDFDocument17 pagesLab Report Triffilliarc PDFsohail parachaPas encore d'évaluation
- HM150 11e V0.1 58062557829210 PDFDocument95 pagesHM150 11e V0.1 58062557829210 PDFrenasPas encore d'évaluation
- GL 112 Cam Analysis ApparatusDocument6 pagesGL 112 Cam Analysis ApparatusNathi Dan MasekoPas encore d'évaluation
- Mece307 - Sertaç ŞimşekDocument18 pagesMece307 - Sertaç ŞimşekErtürk ErdiPas encore d'évaluation
- Reaction Turbine HM288 - e - V1.0Document94 pagesReaction Turbine HM288 - e - V1.0muluken walelgn100% (2)
- Refrigeration Test RigDocument7 pagesRefrigeration Test Rigshibin874141100% (1)
- Thin Cylinder Sec 2 Group 6Document23 pagesThin Cylinder Sec 2 Group 6pidotnasirPas encore d'évaluation
- Compression Test Lab ReportDocument11 pagesCompression Test Lab ReportRobert K OtienoPas encore d'évaluation
- F9092 - Fluid Properties & Hydrostatics BenchDocument4 pagesF9092 - Fluid Properties & Hydrostatics Benchindra98031Pas encore d'évaluation
- ME 31701 GyroscopeDocument6 pagesME 31701 GyroscopeHemanth Kumar APas encore d'évaluation
- ME 123 Lift and Drag Lab HandoutDocument11 pagesME 123 Lift and Drag Lab HandoutFanis VlazakisPas encore d'évaluation
- Hm150 08EDocument13 pagesHm150 08EYoni EhmPas encore d'évaluation
- Experiment Instructions: HM 150.08 Impact of Jet ApparatusDocument8 pagesExperiment Instructions: HM 150.08 Impact of Jet ApparatusNurfarina HusseinPas encore d'évaluation
- PHYS 314 Final Exam Questions: R= 2 v sin (β - α) cos β g cos αDocument3 pagesPHYS 314 Final Exam Questions: R= 2 v sin (β - α) cos β g cos αs_nimalanPas encore d'évaluation
- Hnde SyllabusDocument35 pagesHnde Syllabuss_nimalanPas encore d'évaluation
- Complex PastDocument6 pagesComplex Pasts_nimalanPas encore d'évaluation
- Request For The Vehicle Permit For The Lecturers and Executive Staff From Eight Years of ServiceDocument2 pagesRequest For The Vehicle Permit For The Lecturers and Executive Staff From Eight Years of Services_nimalanPas encore d'évaluation
- Ceramic Materials Short Courses The American Ceramic SocietyDocument2 pagesCeramic Materials Short Courses The American Ceramic Societys_nimalanPas encore d'évaluation
- 2014 Applied Maths Higher Level QuestionsDocument5 pages2014 Applied Maths Higher Level Questionss_nimalanPas encore d'évaluation
- Joint Matriculation Board - : General Certificate EducationDocument6 pagesJoint Matriculation Board - : General Certificate Educations_nimalanPas encore d'évaluation
- Me208: Fundamentals of Machine Design CREDITS 6 (L 4, T 0, P 2)Document3 pagesMe208: Fundamentals of Machine Design CREDITS 6 (L 4, T 0, P 2)s_nimalanPas encore d'évaluation
- First Year First Semester Syllabus: 1. Matrices (06 Hours)Document4 pagesFirst Year First Semester Syllabus: 1. Matrices (06 Hours)s_nimalanPas encore d'évaluation
- Governors For HNDE (Mech) - Labuduwa: 1. Watt GovernorDocument12 pagesGovernors For HNDE (Mech) - Labuduwa: 1. Watt Governors_nimalanPas encore d'évaluation
- MathsDocument178 pagesMathss_nimalanPas encore d'évaluation
- Equipment For Engineering Education: Instructions ManualDocument17 pagesEquipment For Engineering Education: Instructions Manuals_nimalanPas encore d'évaluation
- Instruction Manual: HM 150 Basic Hydraulics BenchDocument13 pagesInstruction Manual: HM 150 Basic Hydraulics Benchs_nimalanPas encore d'évaluation
- Instruction Manual: CT 159 Internal Combustion Engine Basic ModuleDocument25 pagesInstruction Manual: CT 159 Internal Combustion Engine Basic Modules_nimalanPas encore d'évaluation
- Experiment Instructions: HM 134 Falling Ball ViscometerDocument15 pagesExperiment Instructions: HM 134 Falling Ball Viscometers_nimalanPas encore d'évaluation
- Experiment Instructions: HM150.06 Stability of A Floating BodyDocument12 pagesExperiment Instructions: HM150.06 Stability of A Floating Bodys_nimalanPas encore d'évaluation
- Advantage of HydraulicDocument59 pagesAdvantage of Hydraulics_nimalanPas encore d'évaluation
- CSC113 Solution 2009Document6 pagesCSC113 Solution 2009s_nimalanPas encore d'évaluation
- DIN7178Document4 pagesDIN7178Marco Cruz0% (1)
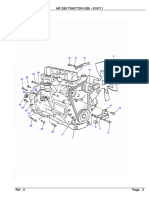
- Massey Ferguson MF 298 TRACTOR (GB) Service Parts Catalogue Manual (Part Number 819711)Document16 pagesMassey Ferguson MF 298 TRACTOR (GB) Service Parts Catalogue Manual (Part Number 819711)qlb898316Pas encore d'évaluation
- 01v Trans DTC To 65535Document31 pages01v Trans DTC To 65535Merim CickusicPas encore d'évaluation
- Fittings - Jaco Compression Fit CatalogDocument6 pagesFittings - Jaco Compression Fit CatalogSinergroup Water Filters Water Purifiers Water SoftenersPas encore d'évaluation
- SRT SRTB SRT-C PDFDocument3 pagesSRT SRTB SRT-C PDFKhaleel PashaPas encore d'évaluation
- Generator AuxiliariesDocument4 pagesGenerator AuxiliariesNilesh KumarPas encore d'évaluation
- GMV Valve 3010 - S + DVL A3 02-04-2014 Ver.D Table.04 - 008.ENDocument2 pagesGMV Valve 3010 - S + DVL A3 02-04-2014 Ver.D Table.04 - 008.ENDimitrios Koustas100% (4)
- Circle Cyl Cond # 1Document156 pagesCircle Cyl Cond # 1walleyranPas encore d'évaluation
- Toma Fuerza Chelsea-489-Parts-ManualDocument44 pagesToma Fuerza Chelsea-489-Parts-ManualJorge MendozaPas encore d'évaluation
- CatalogZP Yamaha 40VMHO-VEO-YETODocument75 pagesCatalogZP Yamaha 40VMHO-VEO-YETOKirill Korolev100% (1)
- Basement Ventilation CalculationDocument4 pagesBasement Ventilation CalculationShubhajit ChakrabortyPas encore d'évaluation
- Sen06616 03Document3 707 pagesSen06616 03xuan100% (2)
- Airbus Manual Freefall LGDocument40 pagesAirbus Manual Freefall LGjoshoa fernandoPas encore d'évaluation
- Manual Jun AirDocument56 pagesManual Jun AirIlyaPas encore d'évaluation
- Hoja de Vida Maquina Piloteadora Sany 330Document3 pagesHoja de Vida Maquina Piloteadora Sany 330Tefi OrtizPas encore d'évaluation
- QuickServe Online - (3666087) B3.9, B4.5, B4.5 RGT, and B5.9 Service ManualDocument20 pagesQuickServe Online - (3666087) B3.9, B4.5, B4.5 RGT, and B5.9 Service ManualArief FadillaPas encore d'évaluation
- Lecture4. DC Generators - 1.ppt - 0Document52 pagesLecture4. DC Generators - 1.ppt - 0abd rahim bin a.samatPas encore d'évaluation
- Ignition SystemDocument11 pagesIgnition SystemSatyajitSahooPas encore d'évaluation
- Ariel Corporation - Arielcorp - Com18Document1 pageAriel Corporation - Arielcorp - Com18Anwar SadatPas encore d'évaluation
- Sidewinder 24 30 Manual REV 05 2014Document6 pagesSidewinder 24 30 Manual REV 05 2014kirk sutherlandPas encore d'évaluation
- AE Mitsubishi s4s-dt ManualDocument22 pagesAE Mitsubishi s4s-dt Manualjoel jeffery SarkarPas encore d'évaluation
- FC 115Document6 pagesFC 115Alexander LopezPas encore d'évaluation
- 2-Spool Control Valve (1 - 2) - Wheel Loader Komatsu Wa20-1 - Work Equipment Control System 777partsDocument3 pages2-Spool Control Valve (1 - 2) - Wheel Loader Komatsu Wa20-1 - Work Equipment Control System 777partsashraf elsayedPas encore d'évaluation
- Catalogo Crox125 WBDocument45 pagesCatalogo Crox125 WBJeisson Beltrán ValderramaPas encore d'évaluation
- Air ConditioningDocument12 pagesAir ConditioningSPas encore d'évaluation
- Chapter 15 - (Bi) Turbocharging and Air CoolingDocument21 pagesChapter 15 - (Bi) Turbocharging and Air CoolingnikolasthermosolutionsPas encore d'évaluation
- MaK M281-M332C Engineer S HandbookDocument62 pagesMaK M281-M332C Engineer S Handbookalmonday100% (3)
- 7711015B 653V Manual PDFDocument8 pages7711015B 653V Manual PDFDegueula CelestinPas encore d'évaluation
- Cylinder Head 10-00-1 (Hino Engine Type J08etm-Ksda) - 2Document4 pagesCylinder Head 10-00-1 (Hino Engine Type J08etm-Ksda) - 2Oecox Cah DjadoelPas encore d'évaluation
- NSK Cat E1102m b206-233Document14 pagesNSK Cat E1102m b206-233Bibek DevPas encore d'évaluation