Vous aimerez peut-être aussi
- Bluetooth Technology: Submitted ByDocument12 pagesBluetooth Technology: Submitted Bynational777Pas encore d'évaluation
- Bluetooth Technology: EE 737 Digital Spread Spectrum Techniques Instructor: Dr. James Stephens Date: 24 May, 2004Document15 pagesBluetooth Technology: EE 737 Digital Spread Spectrum Techniques Instructor: Dr. James Stephens Date: 24 May, 2004Rajesh LenkaPas encore d'évaluation
- Bluetooth IntroductionDocument4 pagesBluetooth IntroductiongowdamandaviPas encore d'évaluation
- Bluetooth Technology in Wireless CommunicationsDocument12 pagesBluetooth Technology in Wireless CommunicationsLiliana AmpPas encore d'évaluation
- The Impact of Bluetooth TechnologyDocument33 pagesThe Impact of Bluetooth TechnologyUnity EfejenePas encore d'évaluation
- List of ContentsDocument13 pagesList of ContentsBedigi SridharPas encore d'évaluation
- Bluetooth Technology in Wireless Communications: Paper Presentation OnDocument11 pagesBluetooth Technology in Wireless Communications: Paper Presentation Onpraveen_449100% (2)
- Bluetooth: Seminar Report ForDocument16 pagesBluetooth: Seminar Report FortravelnagaPas encore d'évaluation
- The Bluetooth SystemDocument16 pagesThe Bluetooth Systemy.priyankareddy7661Pas encore d'évaluation
- Messaging Bluetooth For Your Future .Document14 pagesMessaging Bluetooth For Your Future .vkylovekumarPas encore d'évaluation
- Bluetooth TechnologyDocument17 pagesBluetooth TechnologyAbhinay GuptaPas encore d'évaluation
- Bluetooth: Author: Asharani P. Mirazkar Vijaylaxmi A. HorakeriDocument7 pagesBluetooth: Author: Asharani P. Mirazkar Vijaylaxmi A. Horakeriapi-19799369Pas encore d'évaluation
- BluetoothDocument14 pagesBluetoothSuriyaa SugumarPas encore d'évaluation
- Bluetooth Technology: A Global Specification For Wireless ConnectivityDocument7 pagesBluetooth Technology: A Global Specification For Wireless ConnectivityvenkateshmukharjiPas encore d'évaluation
- Bluetooth: Name and LogoDocument7 pagesBluetooth: Name and LogoRey HeyPas encore d'évaluation
- BluetoothDocument23 pagesBluetoothassignmentsPas encore d'évaluation
- Bluetooth Connect Without CablesDocument55 pagesBluetooth Connect Without CablesTtwentyfour Livetv100% (2)
- What Is BluetoothDocument32 pagesWhat Is BluetoothHeni Jayanti SutadiPas encore d'évaluation
- Bluetooth: M. Habibullah Pagarkar & Chinmay ShahDocument16 pagesBluetooth: M. Habibullah Pagarkar & Chinmay ShahAishwaryaPas encore d'évaluation
- A Survey On Bluetooth TechnologyDocument22 pagesA Survey On Bluetooth TechnologytarasmartinPas encore d'évaluation
- Bluetooth PiconetDocument25 pagesBluetooth PiconetAbhishek SkPas encore d'évaluation
- Prajapati Nirav G (Roll No: 1531) : Faculty of Engineering & I.T. Department Gujarat Technological UniversitDocument14 pagesPrajapati Nirav G (Roll No: 1531) : Faculty of Engineering & I.T. Department Gujarat Technological UniversitNirav PrajapatiPas encore d'évaluation
- The Bluetooth TechnologyDocument8 pagesThe Bluetooth TechnologyKrunal PatelPas encore d'évaluation
- CSE Bluetooth Report PDFDocument18 pagesCSE Bluetooth Report PDFDurgadutt SinghalPas encore d'évaluation
- Experiment No 3Document5 pagesExperiment No 3Priti RumaoPas encore d'évaluation
- Bluetooth TechnologyDocument13 pagesBluetooth TechnologyParthasarathi AnbalaganPas encore d'évaluation
- "MMMM #M: MM M M MM M!Document21 pages"MMMM #M: MM M M MM M!waqaskhattakPas encore d'évaluation
- Bluetooth: Bluetooth Is A ProprietaryDocument31 pagesBluetooth: Bluetooth Is A ProprietaryAbdul BasithPas encore d'évaluation
- Bluetooth Technology: Mobile ComputingDocument12 pagesBluetooth Technology: Mobile Computingrws1000Pas encore d'évaluation
- Abstract:: The Bluetooth TechnologyDocument8 pagesAbstract:: The Bluetooth Technologymohd shafeePas encore d'évaluation
- Authenticated Data Scrambler and Descrambler For Advanced Bluetooth DevicesDocument4 pagesAuthenticated Data Scrambler and Descrambler For Advanced Bluetooth DevicesijaertPas encore d'évaluation
- The Bluetooth TechnologyDocument8 pagesThe Bluetooth TechnologyKushal DeyPas encore d'évaluation
- 1.1bluetooth:: Department of ECE, SRETDocument26 pages1.1bluetooth:: Department of ECE, SRETSandeep DangPas encore d'évaluation
- Bluetooth: Name and LogoDocument19 pagesBluetooth: Name and LogoGurvinder SinghPas encore d'évaluation
- BluetoothDocument3 pagesBluetoothTejashree NipanePas encore d'évaluation
- Bluetooth - Wikipedia PDFDocument162 pagesBluetooth - Wikipedia PDFpranaliPas encore d'évaluation
- 3modern Communication Techniques-BluetoothDocument10 pages3modern Communication Techniques-BluetoothchiyaseshuPas encore d'évaluation
- Wimax Vs Bluetooth (Leah)Document7 pagesWimax Vs Bluetooth (Leah)nicholo_yupi20Pas encore d'évaluation
- Overview of Bluetooth Technology: Hongfeng Wang July 3, 2001Document20 pagesOverview of Bluetooth Technology: Hongfeng Wang July 3, 2001Leonardo CavalcantiPas encore d'évaluation
- Assignment On Bluetooth TechnologyDocument16 pagesAssignment On Bluetooth TechnologyDeep DoradlaPas encore d'évaluation
- FAJEMILUYI SAMUEL Seminar ReportDocument27 pagesFAJEMILUYI SAMUEL Seminar ReportBobby ZackPas encore d'évaluation
- Bluetooth Protocol 1Document10 pagesBluetooth Protocol 1Nida AzizahPas encore d'évaluation
- Bluetooth Technology RajanDocument3 pagesBluetooth Technology RajanKandibanda NithinPas encore d'évaluation
- Module IV: Bluetooth and IEEE 802.15 4.1 To Understand Bluetooth TechnologyDocument13 pagesModule IV: Bluetooth and IEEE 802.15 4.1 To Understand Bluetooth TechnologyAbhirami SPas encore d'évaluation
- Bluetooth: Name and LogoDocument23 pagesBluetooth: Name and Logoshriyaloves_55586196Pas encore d'évaluation
- Video Over Wireless Bluetooth™ Technology: Ben SmithDocument9 pagesVideo Over Wireless Bluetooth™ Technology: Ben SmithSubhash vetchaPas encore d'évaluation
- History: Bluetooth Is ADocument8 pagesHistory: Bluetooth Is AanandPas encore d'évaluation
- Bluetooth 5Document29 pagesBluetooth 5anandPas encore d'évaluation
- Bluetooth: Name and LogoDocument20 pagesBluetooth: Name and LogoAbhishek IyerPas encore d'évaluation
- Report On Bluetooth® NetworkingDocument15 pagesReport On Bluetooth® NetworkingSubash PandeyPas encore d'évaluation
- Bluetooth: Class Maximum Permitted Power MW (DBM) Range (Approximate) Class 1 Class 2 Class 3Document3 pagesBluetooth: Class Maximum Permitted Power MW (DBM) Range (Approximate) Class 1 Class 2 Class 3sathiendranrkPas encore d'évaluation
- Name and Logo: SGMRP 1Document18 pagesName and Logo: SGMRP 1Samir KilledarPas encore d'évaluation
- Name and LogoDocument8 pagesName and LogoHoney WanjariPas encore d'évaluation
- Submitted in Partial Fulfillment of Award of Degree of Bachelor of Technology in Computer Science and EngineeringDocument22 pagesSubmitted in Partial Fulfillment of Award of Degree of Bachelor of Technology in Computer Science and EngineeringAmol ChaudhariPas encore d'évaluation
- Bluetoothtechnology: Seminor OnDocument9 pagesBluetoothtechnology: Seminor OnNitturi VinodkumarPas encore d'évaluation
- Technical Report On BluetoothDocument21 pagesTechnical Report On BluetoothManisha Gupta50% (4)
- 2004dec16 Ntek PD TaDocument3 pages2004dec16 Ntek PD TaStarLink1Pas encore d'évaluation
- OQAM/FBMC for Future Wireless Communications: Principles, Technologies and ApplicationsD'EverandOQAM/FBMC for Future Wireless Communications: Principles, Technologies and ApplicationsÉvaluation : 3.5 sur 5 étoiles3.5/5 (3)
- Advances in Analog and RF IC Design for Wireless Communication SystemsD'EverandAdvances in Analog and RF IC Design for Wireless Communication SystemsGabriele ManganaroÉvaluation : 1 sur 5 étoiles1/5 (1)
- Attachment B Mammo Room Floor PlanDocument1 pageAttachment B Mammo Room Floor PlanPradeepCoolPas encore d'évaluation
- Smart City Mission: Why India Needs Smart Cities'?Document3 pagesSmart City Mission: Why India Needs Smart Cities'?PradeepCoolPas encore d'évaluation
- DS1621Document4 pagesDS1621PradeepCoolPas encore d'évaluation
- Reed SwitchDocument4 pagesReed SwitchPradeepCoolPas encore d'évaluation
- Webcam 100208163119 Phpapp02Document8 pagesWebcam 100208163119 Phpapp02PradeepCoolPas encore d'évaluation
- BT24 DatasheetDocument21 pagesBT24 DatasheetPradeepCoolPas encore d'évaluation
- DTMFDocument5 pagesDTMFPradeepCoolPas encore d'évaluation
- Current Affairs PDF October 2015Document3 pagesCurrent Affairs PDF October 2015PradeepCoolPas encore d'évaluation
- Admission Prospectus AMITYDocument59 pagesAdmission Prospectus AMITYAmit KumarPas encore d'évaluation
- CoverDocument24 pagesCoverPradeepCoolPas encore d'évaluation
- Land Boundary Agreement: HistoricalDocument2 pagesLand Boundary Agreement: HistoricalPradeepCoolPas encore d'évaluation
- India and The WorldDocument24 pagesIndia and The WorldPradeepCoolPas encore d'évaluation
- India and The WorldDocument24 pagesIndia and The WorldPradeepCoolPas encore d'évaluation
- National Judicial Appointments Commission (NJAC)Document3 pagesNational Judicial Appointments Commission (NJAC)PradeepCoolPas encore d'évaluation
- FormatDocument1 pageFormatPradeepCoolPas encore d'évaluation
- History:: Controller Area Network (CAN) Interface in Embedded SystemsDocument12 pagesHistory:: Controller Area Network (CAN) Interface in Embedded SystemsPradeepCoolPas encore d'évaluation
- DtmfdocDocument40 pagesDtmfdoc11090482Pas encore d'évaluation
- Smart City Mission: Why India Needs Smart Cities'?Document3 pagesSmart City Mission: Why India Needs Smart Cities'?PradeepCoolPas encore d'évaluation
- 3.6 Fire SensorDocument1 page3.6 Fire SensorPradeepCoolPas encore d'évaluation
- DTMFDocument5 pagesDTMFPradeepCoolPas encore d'évaluation
- 1st June - 15 JuneDocument19 pages1st June - 15 JunePradeepCoolPas encore d'évaluation
- Awards & HonoursDocument19 pagesAwards & HonoursPradeepCoolPas encore d'évaluation
- 1351147280Document30 pages1351147280lapogkPas encore d'évaluation
- BT24 DatasheetDocument21 pagesBT24 DatasheetPradeepCoolPas encore d'évaluation
- Awards & HonoursDocument19 pagesAwards & HonoursPradeepCoolPas encore d'évaluation
- European Refugee Crisis: How It BeganDocument3 pagesEuropean Refugee Crisis: How It BeganPradeepCoolPas encore d'évaluation
- Alcohol SensorDocument5 pagesAlcohol SensorPradeepCoolPas encore d'évaluation
- European Refugee Crisis: How It BeganDocument3 pagesEuropean Refugee Crisis: How It BeganPradeepCoolPas encore d'évaluation
- Land Acquisition Bill: What Is Land Acquisition and Which Laws Govern It?Document3 pagesLand Acquisition Bill: What Is Land Acquisition and Which Laws Govern It?PradeepCoolPas encore d'évaluation
- AIS700 Troubleshooting Guide 82418-1-EnDocument34 pagesAIS700 Troubleshooting Guide 82418-1-EnAndrey PonomarenkoPas encore d'évaluation
- How To Whitelist An EmailDocument6 pagesHow To Whitelist An Emailkatrina gobPas encore d'évaluation
- ECE 421 Lab4Document39 pagesECE 421 Lab4LuelsonCordovaDeclaradorPas encore d'évaluation
- User Manual: EM Clamp For Immunity Tests Acc. EN 61000-4-6Document7 pagesUser Manual: EM Clamp For Immunity Tests Acc. EN 61000-4-6spohanPas encore d'évaluation
- 18cs46 Module-2Document26 pages18cs46 Module-2Karthik KaranthPas encore d'évaluation
- Samsung Ue40h5570 Ueh55xx Series Led TV Training ManualDocument62 pagesSamsung Ue40h5570 Ueh55xx Series Led TV Training ManualHamza Abbasi100% (1)
- Introduction To Microwave Communication: Dr. Hoda BoghdadyDocument56 pagesIntroduction To Microwave Communication: Dr. Hoda BoghdadyPh AhmedHussien GalalPas encore d'évaluation
- Huawei U2000 Performance KPI On NMSDocument5 pagesHuawei U2000 Performance KPI On NMSfjbsantiagoPas encore d'évaluation
- ION BeginningDocument78 pagesION BeginningRolm BrosPas encore d'évaluation
- Mastering Wireshark - Sample ChapterDocument31 pagesMastering Wireshark - Sample ChapterPackt PublishingPas encore d'évaluation
- AMPTRAC Connectivity Management SystemDocument14 pagesAMPTRAC Connectivity Management SystemBuild SolutionsPas encore d'évaluation
- Information Sheet 1.1: Introduction To Networking: What Is A Network?Document4 pagesInformation Sheet 1.1: Introduction To Networking: What Is A Network?Arman SantiagoPas encore d'évaluation
- Configuring E-Ports On Brocade FC Switches Using FC PortsDocument11 pagesConfiguring E-Ports On Brocade FC Switches Using FC Portsdu2efsPas encore d'évaluation
- Huawei Current Layer Strategy V1.3Document62 pagesHuawei Current Layer Strategy V1.3vikas_bhardwaj301Pas encore d'évaluation
- PDF Kamere Sony z190Document170 pagesPDF Kamere Sony z190Sead OsmicicPas encore d'évaluation
- Dr.M.A.ARCHANA - EMF&MW - LAB - COURSE MATERIALDocument110 pagesDr.M.A.ARCHANA - EMF&MW - LAB - COURSE MATERIALVaibhav Rāj SinghPas encore d'évaluation
- Iw6300 TDMDocument66 pagesIw6300 TDMstefanoff1914Pas encore d'évaluation
- Guia de Estudio ConservacionDocument126 pagesGuia de Estudio ConservacionNICOLE CARDENAS BELTRANPas encore d'évaluation
- 5989 2382enDocument62 pages5989 2382enDinu IonutPas encore d'évaluation
- Introduction of Ethical HackingDocument8 pagesIntroduction of Ethical HackingNair ShreejaPas encore d'évaluation
- ICom IDASDocument12 pagesICom IDASMikePas encore d'évaluation
- Presentation Skills 1Document27 pagesPresentation Skills 1kimmijain2002Pas encore d'évaluation
- Which Country Number Start With 234 - Google SearchDocument1 pageWhich Country Number Start With 234 - Google SearchjohnPas encore d'évaluation
- Introduction To MicrocontrollersDocument13 pagesIntroduction To MicrocontrollerssvirkomartinkoPas encore d'évaluation
- MN000784A01-BG Enus MOTOTRBO XiR C2yy660 FULL KEYPAD PORTABLE RADIO USER GUIDEDocument222 pagesMN000784A01-BG Enus MOTOTRBO XiR C2yy660 FULL KEYPAD PORTABLE RADIO USER GUIDEEi SadPas encore d'évaluation
- DoubleTalk Carrier in Carrier Acceptance & OverviewDocument4 pagesDoubleTalk Carrier in Carrier Acceptance & OverviewarzeszutPas encore d'évaluation
- VDR Monitor Instruction Manual PosterDocument7 pagesVDR Monitor Instruction Manual PosterardipangulihiPas encore d'évaluation
- 5G RAN2.1 NSA/SA Architecture Introduction: Huawei Technologies Co., LTDDocument23 pages5G RAN2.1 NSA/SA Architecture Introduction: Huawei Technologies Co., LTDTarik BouzitPas encore d'évaluation
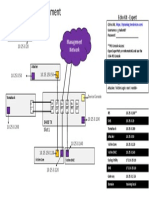
- Student 8: IP Assignment: Management NetworkDocument1 pageStudent 8: IP Assignment: Management NetworkBruno NunesPas encore d'évaluation
- InDefend Data SheetDocument3 pagesInDefend Data Sheetabhijit379Pas encore d'évaluation