Académique Documents
Professionnel Documents
Culture Documents
Interface Motor DC
Transféré par
Lukman SetiawanCopyright
Formats disponibles
Partager ce document
Partager ou intégrer le document
Avez-vous trouvé ce document utile ?
Ce contenu est-il inapproprié ?
Signaler ce documentDroits d'auteur :
Formats disponibles
Interface Motor DC
Transféré par
Lukman SetiawanDroits d'auteur :
Formats disponibles
LAPORAN
PRAKTEK INTERFACE SISTEM KONTROL DENGAN BEBAN MOTOR
Oleh :
Lukman Setiawan (1614026)
Aloisius Aditya L. S. N (1614009)
Gilang Galih Purnomo (1614016)
Ilham Rachmadi (1614032)
KEMENTERIAN PENDIDIKAN DAN KEBUDAYAAN REPUBLIK
INDONESIA
JOINT PROGRAM STTAR PPPPTK/VEDC MALANG
Pratek Interface Dengan Beban Motor
JURUSAN TEKNIK ELEKTRO
PROGRAM STUDI MEKATRONIKA
2015
A. DASAR TEORI
1. LDR (Light Dependent Resistor)
Light Dependent Resistor atau disingkat dengan LDR adalah jenis Resistor yang nilai
hambatan atau nilai resistansinya tergantung pada intensitas cahaya yang diterimanya. Nilai
Hambatan LDR akan menurun pada saat cahaya terang dan nilai Hambatannya akan menjadi
tinggi jika dalam kondisi gelap. Dengan kata lain, fungsi LDR (Light Dependent Resistor) adalah
untuk menghantarkan arus listrik jika menerima sejumlah intensitas cahaya (Kondisi Terang) dan
menghambat arus listrik dalam kondisi gelap.
Naik turunnya nilai Hambatan akan sebanding dengan jumlah cahaya yang diterimanya.
Pada umumnya, Nilai Hambatan LDR akan mencapai 200 Kilo Ohm (k) pada kondisi gelap
dan menurun menjadi 500 Ohm () pada Kondisi Cahaya Terang.
LDR (Light Dependent Resistor) yang merupakan Komponen Elektronika peka cahaya
ini sering digunakan atau diaplikasikan dalam Rangkaian Elektronika sebagai sensor pada
Lampu Penerang Jalan, Lampu Kamar Tidur, Rangkaian Anti Maling, Shutter Kamera, Alarm
dan lain sebagainya.
Bentuk dan Simbol LDR
Pratek Interface Dengan Beban Motor
Cara Mengukur LDR (Light Dependent Resistor) dengan Multimeter
Alat Ukur yang digunakan untuk mengukur nilai hambatan LDR adalah Multimeter
dengan fungsi pengukuran Ohm (). Agar Pengukuran LDR akurat, kita perlu membuat 2
kondisi pencahayaan yaitu pengukuran pada saat kondisi gelap dan kondisi terang. Dengan
demikian kita dapat mengetahui apakah Komponen LDR tersebut masih dapat berfungsi dengan
baik atau tidak.
Mengukur LDR pada Kondisi Terang :
Atur posisi skala selektor Multimeter pada posisi Ohm
Hubungkan Probe Merah dan Probe Hitam Multimeter pada kedua kaki LDR (tidak ada
polaritas)
Berikan cahaya terang pada LDR
Baca nilai resistansi pada Display Multimeter. Nilai Resistansi LDR pada kondisi terang
akan berkisar sekitar 500 Ohm.
Pratek Interface Dengan Beban Motor
Mengukur LDR pada Kondisi Gelap :
Atur posisi skala selektor Multimeter pada posisi Ohm
Hubungkan Probe Merah dan Probe Hitam Multimeter pada kedua kaki LDR (tidak ada
polaritas)
Tutup bagian permukaan LDR atau pastikan LDR tidak mendapatkan cahaya
Baca nilai resistansi pada Display Multimeter. Nilai Resistansi LDR di kondisi gelap
akan berkisar sekitar 200 KOhm.
Pratek Interface Dengan Beban Motor
Catatan :
Hasil Pengukuran akan berubah tergantung pada tingkat intesitas cahaya yang diterima oleh LDR
itu sendiri.
Satuan terang cahaya atau Iluminasi (Illumination) adalah lux
Sebutan lain untuk LDR (Light Dependent Resistor) adalah Photo Resistor, Photo Conduction
ataupun Photocell.
2. Transistor
Transistor adalah sebuah komponen elektronika yang digunakan untuk penguat,
sebagai sirkuit pemutus, sebagai penyambung, sebagai stabilitas tegangan, modulasi
sinyal dan lain-lain. Fungsi transistor juga sebagai kran listrik, yang dimana
berdasarkan tegangan inputnya, memungkinkan pangalisaan listrik yang akurat yang
berasal dari sumber lintrik. Itulah definisi dari transistor.
Berikut ini fungsi transistor :
Adapun fungsi dari transisitor diantaranya sebagaimana di bawah ini:
Transistor sebagai saklar elektronik, yaitu dengan mengatur bias dari sebuah
transistor sampai transistor jenuh maka didapat hubungan singkat antar kaki konektor
Pratek Interface Dengan Beban Motor
dan emitor, dengan memanfaatkan kejadian ini maka transistor bisa digunakan
sebagai saklar.
Transistor sebagai penguat arus, lalu fungsi dari transistor lainnya adalah dapat di
gunakan sebagai penguat arus. Dengan fungsi ini transistor dapat digunakan sebagai
rangkaian power supply tentunya dengan tegangan yang di setting. Untuk dapat
digunakan sebagai fungsi penguat arus transistor harus dibias tegangan yang constant
pada basisnya, agar pada emitor keluar tegangan yang tetap. Umumnya untuk dapat
tegangan basis agar tetap digunakan diode zener.
Transistor sebagai penguat sinyal AC, Adapun fungsi transistor yang yang lainnya
adalah sebagai penguat sinyal AC, dan lain-lain.
Jenis-Jenis dari Transistor
3. Motor DC
Motor DC adalah motor listrik yang memerlukan suplai tegangan arus searah pada kumparan
medan untuk diubah menjadi energi gerak mekanik. Kumparan medan pada motor dc disebut
stator (bagian yang tidak berputar) dan kumparan jangkar disebut rotor (bagian yang berputar).
Motor arus searah, sebagaimana namanya, menggunakan arus langsung yang tidak
langsung/direct-unidirectional. Motor DC memiliki 3 bagian atau komponen utama untuk dapat
berputar sebagai berikut.
Bagian Atau Komponen Utama Motor DC :
Kutub medan. Motor DC sederhana memiliki dua kutub medan: kutub utara dan kutub
selatan. Garis magnetik energi membesar melintasi ruang terbuka diantara kutub-kutub
dari utara ke selatan. Untuk motor yang lebih besar atau lebih komplek terdapat satu atau
lebih elektromagnet.
Pratek Interface Dengan Beban Motor
Current Elektromagnet atau Dinamo. Dinamo yang berbentuk silinder, dihubungkan ke as
penggerak untuk menggerakan beban. Untuk kasus motor DC yang kecil, dinamo
berputar dalam medan magnet yang dibentuk oleh kutub-kutub, sampai kutub utara dan
selatan magnet berganti lokasi.
Commutator. Komponen ini terutama ditemukan dalam motor DC. Kegunaannya adalah
untuk transmisi arus antara dinamo dan sumber daya. Keuntungan utama motor DC
adalah sebagai pengendali kecepatan, yang tidak mempengaruhi kualitas pasokan daya.
Motor ini dapat dikendalikan dengan mengatur: Tegangan dinamo meningkatkan
tegangan dinamo akan meningkatkan kecepatan Arus medan menurunkan arus medan
akan meningkatkan kecepatan
Gambar dari Motor DC
Keuntungan utama motor DC adalah sebagai pengendali kecepatan, yang tidak mempengaruhi
kualitas pasokan daya. Motor ini dapat dikendalikan dengan mengatur:
Tegangan dinamo meningkatkan tegangan dinamo akan meningkatkan kecepatan
Arus medan menurunkan arus medan akan meningkatkan kecepatan.
4. Relay
Relay adalah Saklar (Switch) yang dioperasikan secara listrik dan merupakan komponen
Electromechanical (Elektromekanikal) yang terdiri dari 2 bagian utama yakni Elektromagnet
6
Pratek Interface Dengan Beban Motor
(Coil) dan Mekanikal (seperangkat Kontak Saklar/Switch). Relay menggunakan Prinsip
Elektromagnetik untuk menggerakkan Kontak Saklar sehingga dengan arus listrik yang kecil
(low power) dapat menghantarkan listrik yang bertegangan lebih tinggi. Sebagai contoh, dengan
Relay yang menggunakan Elektromagnet 5V dan 50 mA mampu menggerakan Armature Relay
(yang berfungsi sebagai saklarnya) untuk menghantarkan listrik 220V 2A.
Gambar Bentuk dan Simbol Relay
Dibawah ini adalah gambar bentuk Relay dan Simbol Relay yang sering ditemukan di Rangkaian
Elektronika.
Prinsip Kerja Relay
Pada dasarnya, Relay terdiri dari 4 komponen dasar yaitu :
7
Pratek Interface Dengan Beban Motor
1. Electromagnet (Coil)
2. Armature
3. Switch Contact Point (Saklar)
4. Spring
B. Praktek
Praktek ke 1
a. Tujuan
1. Dapat menghitung tegangan yang melewati beban Motor DC dengan
menggunakan relay
b. Alat :
1. Catu Daya 12V;-12V : 1 Unit
2. CatuDaya 5V /12V : 1 Unit
3. AVO Meter Digital : 1 Unit
c. Bahan :
1. Kabel Merah
: Secukupnya
2. Kabel Hitam
: Secukupnya
3. Kabel Jumper
: Secukupnya
4. Resistor
: 1 Buah
5. Switch SPTD
: 1 Buah
6. Relay
: 1 Buah
7. Motor DC
: 1 Buah
d. Keselamatan Kerja :
1. Pastikan catudaya dalam keadaan mati
2. Periksa catudaya mempunyai teganagn 5 V dengan menggunakan AVO meter
3. Pastikan trainer dalam keadanbaik dan berfungsi dengan benar.
4. Pastikan kabel dalam keadaan baik
Pratek Interface Dengan Beban Motor
Praktik 1 :
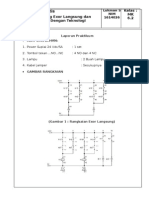
System interface Motor Putar kiri dan Kanan menggunakan kendali relay
Gambar 1.1: Simulasi praktek 1 : Motor dengan kendali relay
Pratek Interface Dengan Beban Motor
Gambar 1.2 Rangkaian Real Praktik 1 : Motor dengan kendali relay
Analisa Praktek 1
Praktek
Uo = 4,87
RB = 2,2K
UCE = 90 mV
UBE = 0.66V
Urelay = 4,82 V
UM = 10,5 V
URB = 4,12V
ULed1 = 10,4V
ULed2 =10,4 V
10
Pratek Interface Dengan Beban Motor
R Led =
RB =
I B=
U SU Led
I Led
U iU BE
IB
R Led =
I B=
80 mA
=2 mA
40
12 V 1,5 V
=350 E 12=330
30 mA
IC
RB =
5 V 0,7 V
= 2,15K E12 = 2,2K
2 mA
Kesimpulan
Pada rangkaian ini driver motor menggunakan relay DPDT yang diaktifkan dengan
transistor dimana saat input ttl bernilai high maka motor berputar ke kanan dan jika input ttl
bernilai low maka motor akan berputar ke kiri.
Praktek 2
a. Tujuan
Mengaplikasiakan op amp sebagai pengendali motor putar kanan putar kiri
1.
2.
3.
1.
2.
3.
4.
5.
6.
7.
dengan 1 input TTL.
b. Alat :
Catu Daya 12V;-12V : 1 Unit
CatuDaya 5V /12V : 1 Unit
AVO Meter Digital : 1 Unit
c. Bahan :
Kabel Merah
: 2 Buah
Kabel Hitam
: 2 Buah
Kabel Jumper
: Secukupnya
Resistor
: 3 Buah
Switch SPDT
: 1 Buah
Relay
: 1 Buah
Op-Amp
: 2 Buah
11
Pratek Interface Dengan Beban Motor
d. Keselamatan Kerja :
1. Pastikan catudaya dalam keadaan mati
2. Periksa catudaya mempunyai teganagn 5 V dengan menggunakan AVO meter
3. Periksa catudaya mempunyai tegangan 12 V dan 12 V dengan menggunakan
AVO meter
4. Pastikan kabel dalam keadaan baik
Praktik 2 :
System interface Motor Putar kiri dan Kanan dengan 1 input menggunakan op-amp
Gambar 2.1: Simulasi praktek 2 : Motor dengan 1 input menggunakan op-amp
12
Pratek Interface Dengan Beban Motor
Gambar 2.2 Rangkaian Real Praktik 2 : Motor dengan 1 input menggunakan op-amp
Analisa Praktek 2
Praktik
Teggangan (U)
UO = 4,96 V
UR1 = 3,75 V
UR2 = 1,9 V
UM(kanan) = 13,32 V
UM(Kiri) = -13,09 V
13
Pratek Interface Dengan Beban Motor
RB =
I B=
U iU BEUm
IB
80 mA
=2 mA
40
I B=
RB =
IC
11,3 V 0,7 V 12V
= 700680
2 mA
Kesimpulan
Saat input positif op amp mendapat teganga lebih tinggi dari pada input negatif maka
output tegangan pada op amp akan bernilai positif dan motor berputar ke kanan. Sedangkan saat
input negatif op amp mendapatkan tegangan lebih besar daripada input positif maka output op
amp akan bernilai negatif dan motor berputar ke kiri.
Praktek 3
a. Tujuan
1. Mengaplikasiakan op amp sebagai pengendali motor putar kanan putar kiri
dengan 2 input TTL.
b. Alat :
1. Catu Daya 12V;-12V
2. CatuDaya 5V /12V
3. AVO Meter Digital
c. Bahan :
1. Transistor TIP31C
2. Transistor TIP32C
3. Resistor 1K
4. Resistor 1,2k
5. Switch SPDT
6.
7.
8.
d.
1.
2.
3.
: 1 Unit
: 1 Unit
: 1 Unit
: 2 buah
: 2 buah
: 4 buah
: 2 buah
: 1 Unit
Op amp
: 2 buah
Motor DC 12V
: 1 buah
Kabel jumper
: secukupnya
Keselamatan Kerja :
Pastikan catudaya dalam keadaan mati
Periksa catudaya mempunyai tegangan 5 V dengan menggunakan AVO meter
Periksa catudaya mempunyai tegangan 12 V dan 12 V dengan menggunakan
AVO meter
14
Pratek Interface Dengan Beban Motor
4. Pastikan kabel dalam keadaan baik
System interface Motor Putar kiri dan Kanan dengan 2 input menggunakan op-amp
Gambar 3.1: Simulasi Praktek 3 pada livewire
15
Pratek Interface Dengan Beban Motor
Gambar 3.2: Rangkaian Real Praktek 3 menggunakan OP-amp
Analisa Praktek 3:
Praktek
UO1 = 9.98V
UO2 =9.95V
RB = 1,2K
UCE = 6,5V
UBE = 0,73V
UM = 7,3V
URB =3,7V; -3,9V
RB =
I B=
U iU BEUm
IB
80 mA
=2 mA
40
I B=
RB =
IC
10 V 0,7 V 12 V
= 1,35K1,2K
2 mA
Kesimpulan :
Motor akan berputar ke kanan atau ke kiri bila salah satu switch bernilai high dan
motor akan berhenti bila kedua switch bernilai sama. Karena Vo pada kedua switch bernilai sama
sehingga Vmotor bernilai 0V.
16
Pratek Interface Dengan Beban Motor
Praktek 4
a. Tujuan
1. Dapat mengaplikasikan IC ULN sebagai sistem kontrol.
b. Alat :
1. Trainer Digital
: 1 Unit
2. CatuDaya 5V /12V : 1 Unit
3. AVO Meter Digital : 1 Unit
c. Bahan :
1. Kabel Merah
: 2 Buah
2. Kabel Hitam
: 2 Buah
3. Kabel Jumper
: Secukupnya
4. Resistor
: 1 Buah
5. IC ULN 2083
: 1 Buah
6. Motor DC
: 1 Buah
7. Relay
: 1 Buah
d. Keselamatan Kerja :
1. Pastikan catudaya dalam keadaan mati
2. Periksa catudaya mempunyai tegangan 5 V dengan menggunakan AVO meter
3. Periksa catudaya mempunyai tegangan 12 V dan 12 V dengan menggunakan
AVO meter
4. Pastikan kabel dalam keadaan baik
System interface motor putar kiri dan kanan menggunakan IC ULN
17
Pratek Interface Dengan Beban Motor
Gambar 4.1: Simulasi Praktek 4 pada livewire
Gambar 4.2: Rangkaian Real Praktek 4 Menggunakan IC ULN
Analisa Praktek 4:
Praktek
18
Pratek Interface Dengan Beban Motor
UO1 =4,9V
UO2 =4,9V
UM = 10,4V
Kesimpulan :
IC ULN 2803 merupakan IC open collector yang memiliki tegangan maksimum
mencapai 50 volt dan arus 500mA. Untuk mengaktifkan output pada IC ULN, maka rangkaian
yang harus dirancang adalah dengan menggunakan pull up. Yaitu dengan cara memberi tegangan
sumber pada beban, karena output IC tersebut bernilai low saat kondisi high.Praktek 5
a. Tujuan
1. Mengetahui prisip kerja LDR
2. Dapat mengaplikasi LDR pada suatu system.
b. Alat :
1. Trainer Digital
: 1 Unit
2. CatuDaya 5V /12V : 1 Unit
3. AVO Meter Digital : 1 Unit
c. Bahan :
1. Kabel Merah
: 4 Buah
2. Kabel Hitam
: 4 Buah
3. Kabel Jumper
: Secukupnya
4. Resistor
: 3 Buah
5. Switch SPDT
: 1 Buah
6. Relay
: 1 Buah
7. LDR
: 1 Buah
8. OP-amp
: 1 Buah
9. Transistor TIP31C
: 1 Buah
10. Transistor TIP32C
: 1 Buah
d. Keselamatan Kerja :
1. Pastikan catudaya dalam keadaan mati
2. Periksa catudaya mempunyai teganagn 5 V dengan menggunakan AVO meter
3. Pastikan trainer dalam keadanbaik dan berfungsi dengan benar.
4. Pastikan kabel dalam keadaan baik
System interface motor putar kiri dan kanan menggunakan sensor LDR
19
Pratek Interface Dengan Beban Motor
Gambar 5.1: Simulasi Praktek 5 pada livewire
Gambar 5.2: Rangkaian Real Praktek 5 Menggunakan Sensor LDR
20
Pratek Interface Dengan Beban Motor
Analisa Praktek 5:
Komparator:
V o=
R1
V
R 1 + R2 i
10 V =
R1
12
R 1+ 400
R1=2,1 K 2,2 K
///
U iU BEUm
IB
I B=
80 mA
=2 mA
40
RB =
RB =
I B=
IC
11,9 V 0,7 V 12
= 400390
2mA
Kesimpulan :
Saat LDR pada kondisi terang tahannya 400 sehingga tegangan yang dihasilkan pada
komparator lebih besar daripada tegangan yang ada pada input positif dan motor berputar ke
kiri. Sedangkan pada saat kondisi gelap tahan LDR 2M sehingga tegangan pada komparator
lebih kecil daripada tegangan pada input positif dan motor berputar ke kanan.
Praktek 6
a. Tujuan
1. Mengetahui prinsip kerja ne555 sebagai PWM.
2. Dapat mengaplikasikan PWM sebagai pengatur kecepatan pada
motor.
b. Alat :
1. Catu Daya 5V
2. Catu Daya 12V
3. Avometer Digital
c. Bahan :
1. Transistor TIP31C
2. Transistor TIP32C
3. Ne555
4. Op amp
5. Resistor
: 1 Unit
: 1 Unit
: 1 Unit
: 2 buah
: 2 buah
: 1 buah
: 2 buah
: 4 buah
21
Pratek Interface Dengan Beban Motor
6. Kapasitor
: 1 buah
7. Potensiometer
: 1 buah
8. Switch SPDT
: 1 Unit
9. Motor DC 12V
: 1 buah
10.
Kabel jumper
: secukupnya
d. Keselamatan Kerja :
1. Periksa catu daya mempunyai teganagn 5V dan 12V dengan
menggunakan AVO meter.
2. Pastikan catu daya dalam keadaan mati saat merancang.
3. Pastikan trainer dan seluruh komponen dalam keadan baik dan
berfungsi dengan benar.
System interface motor putar kiri dan kanan menggunakan PWM
Gambar 6.1: Simulasi Praktek 6 pada livewire
Analisa :
PWM
22
Pratek Interface Dengan Beban Motor
R
( A+2 RB )C
1,44
F=
R
( A+2 RB ) 10.106
1,44
10.000 Hz=
R
( A+2 RB )=14,4
Kesimpulan :
Apabila frekuensi semakin tinggi maka motor akan berputar semakin cepat begitu pula
sebaliknya apabila frekuensi semakin rendah maka motor DC akan berputar semakin lambat.
23
Vous aimerez peut-être aussi
- Daftar IsiDocument5 pagesDaftar IsiLukman SetiawanPas encore d'évaluation
- Kki MoDocument8 pagesKki MoLukman SetiawanPas encore d'évaluation
- Laporan Kegiatan Mingguan Kuliah Kerja Industri I: AutowrapperDocument5 pagesLaporan Kegiatan Mingguan Kuliah Kerja Industri I: AutowrapperLukman SetiawanPas encore d'évaluation
- RealisasiDocument4 pagesRealisasiLukman SetiawanPas encore d'évaluation
- Alat Ukur Panjang Digital Berbasis Mikro PDFDocument19 pagesAlat Ukur Panjang Digital Berbasis Mikro PDFLukman SetiawanPas encore d'évaluation
- MK62 LukmanSetiawan ONdanOFFDocument4 pagesMK62 LukmanSetiawan ONdanOFFLukman SetiawanPas encore d'évaluation
- Materi SipDocument14 pagesMateri Siprachmat92Pas encore d'évaluation
- Lampiran 1Document1 pageLampiran 1Lukman SetiawanPas encore d'évaluation
- Exor Dan ORDocument5 pagesExor Dan ORLukman SetiawanPas encore d'évaluation
- KONTROL OTOMATIS ELEKTRIKDocument5 pagesKONTROL OTOMATIS ELEKTRIKLukman SetiawanPas encore d'évaluation
- Mendeteksi Posisi HH Android Kita Yang HilangDocument1 pageMendeteksi Posisi HH Android Kita Yang HilangLukman SetiawanPas encore d'évaluation
- Mendeteksi Posisi HH Android Kita Yang HilangDocument1 pageMendeteksi Posisi HH Android Kita Yang HilangLukman SetiawanPas encore d'évaluation
- Modul Praktikum Rangkaian DigitalDocument45 pagesModul Praktikum Rangkaian Digitalchairul_latief13Pas encore d'évaluation
- MK62 LukmanSetiawan ONdanOFFDocument4 pagesMK62 LukmanSetiawan ONdanOFFLukman SetiawanPas encore d'évaluation
- Momentum SudutDocument4 pagesMomentum SudutLukman SetiawanPas encore d'évaluation