Vous aimerez peut-être aussi
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- Atlas Bradford (Ver03-Apr05)Document8 pagesAtlas Bradford (Ver03-Apr05)Gabriel IbarraPas encore d'évaluation
- Dometic RM4185 6405 PDFDocument20 pagesDometic RM4185 6405 PDFcarlosrei2Pas encore d'évaluation
- Information Security Chapter 2 Planning For SecurityDocument20 pagesInformation Security Chapter 2 Planning For SecurityBramara Sri100% (1)
- Diff BW CBO and RBODocument2 pagesDiff BW CBO and RBORamreddy BollaPas encore d'évaluation
- Wilmat Counterbalance Truck 11-11-2010Document2 pagesWilmat Counterbalance Truck 11-11-2010alirizal0% (1)
- Passport Appointment PDFDocument5 pagesPassport Appointment PDFRitu AgarwalPas encore d'évaluation
- SIRTOS A Simple Real Time Operating SystemDocument6 pagesSIRTOS A Simple Real Time Operating Systemmiguel angelPas encore d'évaluation
- Municipality of AloguinsanDocument5 pagesMunicipality of AloguinsanLady Mae BrigoliPas encore d'évaluation
- University of Wah Wah Engineering College Assignment # 05Document6 pagesUniversity of Wah Wah Engineering College Assignment # 05Ha M ZaPas encore d'évaluation
- Acornejo Southmayd ProfileDocument11 pagesAcornejo Southmayd Profileapi-242543114Pas encore d'évaluation
- Checklists 4yrDocument2 pagesChecklists 4yrKarla TreviñoPas encore d'évaluation
- S2N Gyro Interface ManualDocument20 pagesS2N Gyro Interface ManualAfrizal Setiawan100% (1)
- Grade 2 SasmoDocument8 pagesGrade 2 SasmoThích Toán HọcPas encore d'évaluation
- VMware VSphere Troubleshooting 5.5Document224 pagesVMware VSphere Troubleshooting 5.5Eugen-Florian NegruPas encore d'évaluation
- EOI - Replacement of CSU & OGC at UranDocument7 pagesEOI - Replacement of CSU & OGC at UranGaurav TripathiPas encore d'évaluation
- ETG3000 BrochureDocument9 pagesETG3000 BrochureMayolo MartinezPas encore d'évaluation
- Detailed Lesson Log in MathematicsDocument7 pagesDetailed Lesson Log in MathematicsChan Chan100% (1)
- Position PaperDocument3 pagesPosition Paperapi-178099475100% (1)
- Software: Measurlink Is An Easy-To-Use, Windows-Based Family of Quality Data Management Software ApplicationsDocument8 pagesSoftware: Measurlink Is An Easy-To-Use, Windows-Based Family of Quality Data Management Software ApplicationsBrandi DalePas encore d'évaluation
- ABB REL5xx RIOConverterDocument10 pagesABB REL5xx RIOConverterzinab90100% (1)
- Syed Saddam Kazmi: Career ObjectivesDocument3 pagesSyed Saddam Kazmi: Career Objectiveslike saddamPas encore d'évaluation
- 4x16 RM NyyfDocument1 page4x16 RM NyyfjamilPas encore d'évaluation
- Sabor CaseDocument3 pagesSabor CaseTushar LaroiyaPas encore d'évaluation
- Snare Drum: Some Entries From Various Sources (Loosely Cited)Document6 pagesSnare Drum: Some Entries From Various Sources (Loosely Cited)gljebglejebPas encore d'évaluation
- Oracle Linux 6 InstallationDocument35 pagesOracle Linux 6 InstallationendalePas encore d'évaluation
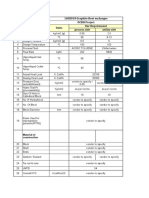
- 16HE018 Graphite Heat Exchanger DCBH Project Sr. No. Particulars Units Our Requirement Process Side Utility SideDocument2 pages16HE018 Graphite Heat Exchanger DCBH Project Sr. No. Particulars Units Our Requirement Process Side Utility SideBhaumik BhuvaPas encore d'évaluation
- Rectangular Tank SizingDocument8 pagesRectangular Tank Sizingvofaith100% (16)
- Alejandra PDFDocument1 pageAlejandra PDFCristian Melendres OrellanaPas encore d'évaluation
- CFD Analysis of Free Cooling of Modular Data CentersDocument4 pagesCFD Analysis of Free Cooling of Modular Data CentersEmad AbdelsamadPas encore d'évaluation
- PLSQL TutorialspointDocument22 pagesPLSQL TutorialspointSatanu MaityPas encore d'évaluation