Vous aimerez peut-être aussi
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5795)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- Physics Notes Section ADocument10 pagesPhysics Notes Section Astreaks1018100% (4)
- Specific Gravity and Water Absorption Tests On AggregatesDocument7 pagesSpecific Gravity and Water Absorption Tests On AggregatesChou FighterPas encore d'évaluation
- Honors Physics I - Chapter 10: Thermodynamics 2013-2014 ExamDocument7 pagesHonors Physics I - Chapter 10: Thermodynamics 2013-2014 ExamPLAYVOPas encore d'évaluation
- Gravity-Balancing of Spatial Robotic Manipulators: Mechanism and Machine TheoryDocument14 pagesGravity-Balancing of Spatial Robotic Manipulators: Mechanism and Machine TheoryLucas HenriquePas encore d'évaluation
- DKD R 5 1 e Resistance ThermometersDocument10 pagesDKD R 5 1 e Resistance ThermometersHassan Ahmed KhanPas encore d'évaluation
- Introduction To Physics: 1.2 Scalars & VectorsDocument3 pagesIntroduction To Physics: 1.2 Scalars & Vectorsaliah farhanyPas encore d'évaluation
- 10 Vectors HandoutsDocument97 pages10 Vectors HandoutsArries Official2Pas encore d'évaluation
- IEEE STD C57.98-1993 - IEEE Guide For Transformer Impulse Tests.Document59 pagesIEEE STD C57.98-1993 - IEEE Guide For Transformer Impulse Tests.anand_girgaonkar100% (1)
- Department of Academics: 1.0 Stability 1.1 DisplacementDocument10 pagesDepartment of Academics: 1.0 Stability 1.1 DisplacementIvan SimonPas encore d'évaluation
- CT Calc-Gs-Lvac Swgr.Document54 pagesCT Calc-Gs-Lvac Swgr.madhavanPas encore d'évaluation
- Chapter2 ReviewerDocument6 pagesChapter2 ReviewerLJ IDANE ARANASPas encore d'évaluation
- Velocity Dependent Force ProblemsDocument5 pagesVelocity Dependent Force ProblemsspoonrooPas encore d'évaluation
- Beaconhouse Clifton Campus - IB World SchoolDocument4 pagesBeaconhouse Clifton Campus - IB World SchoolRosheeni ShakeelPas encore d'évaluation
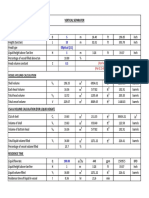
- Vertical Separator Input: 5 10 Elliptical (2:1) 1Document2 pagesVertical Separator Input: 5 10 Elliptical (2:1) 1Veera ManiPas encore d'évaluation
- Physics Answers Electric and MagnetismDocument8 pagesPhysics Answers Electric and MagnetismGeethanjali SivakumarPas encore d'évaluation
- Transmission LinesDocument19 pagesTransmission LinesSherwin CatolosPas encore d'évaluation
- Lectur Power Sys Representation 30032020 110408pmDocument20 pagesLectur Power Sys Representation 30032020 110408pmGaylethunder007Pas encore d'évaluation
- Test PaperDocument3 pagesTest PaperAnushaPas encore d'évaluation
- 0303 FrictionDocument4 pages0303 FrictionimfizicsPas encore d'évaluation
- Physics I ProblemsDocument1 pagePhysics I ProblemsbosschellenPas encore d'évaluation
- Levin Jo 11Document7 pagesLevin Jo 11Satyaki ChowdhuryPas encore d'évaluation
- PPN j522Document16 pagesPPN j522TiowlPas encore d'évaluation
- Industrial InstrumentationDocument24 pagesIndustrial InstrumentationNHIÊN CÙ VĂNPas encore d'évaluation
- Btech Ce 3 Sem Engineering Mechanics Kce 301 2023Document4 pagesBtech Ce 3 Sem Engineering Mechanics Kce 301 2023HS EDITZPas encore d'évaluation
- Assignment 2 - ME19301Document2 pagesAssignment 2 - ME19301ashwinharry69Pas encore d'évaluation
- Velocity and Acceleration WorksheetDocument4 pagesVelocity and Acceleration Worksheetapi-311245804Pas encore d'évaluation
- Objectives:: Experiment No.3 Radial ConductionDocument5 pagesObjectives:: Experiment No.3 Radial ConductionWalid AdnanPas encore d'évaluation
- Chapter 2 Example ProblemsDocument41 pagesChapter 2 Example ProblemsYaqein AliPas encore d'évaluation
- N ' L M I: Ewton S Aws of OtionDocument8 pagesN ' L M I: Ewton S Aws of OtionSamyak JainPas encore d'évaluation
- Chapter 6Document45 pagesChapter 6Paolo EsguerraPas encore d'évaluation