Vous aimerez peut-être aussi
- 7.4 Tower Design: Bracing SystemsDocument49 pages7.4 Tower Design: Bracing SystemsBoisterous_Girl100% (1)
- Noise and Vibration in Friction Systems (2015)Document258 pagesNoise and Vibration in Friction Systems (2015)Brenno Moura MouraPas encore d'évaluation
- Design SectionDocument19 pagesDesign SectionKrishna KumarPas encore d'évaluation
- New Features StaadDocument4 pagesNew Features Staadmayur_lanjewarPas encore d'évaluation
- Design of Pressed Steel Tank Using IS CodesDocument5 pagesDesign of Pressed Steel Tank Using IS CodesISFAQUL AHMEDPas encore d'évaluation
- Connection Design in The 2005 Aisc SpecificationDocument10 pagesConnection Design in The 2005 Aisc SpecificationRohan Karande0% (1)
- Seafastening Holding Down BracketDocument1 pageSeafastening Holding Down BracketRohan Karande50% (2)
- M14Cent Pump VibDocument49 pagesM14Cent Pump VibBhargav Chaudhari100% (1)
- 15A 2 Environmental LoadsDocument14 pages15A 2 Environmental LoadsCahyadi SetiawanPas encore d'évaluation
- Tekla Structures Catalog ProfilesDocument144 pagesTekla Structures Catalog ProfilesNeenu VsPas encore d'évaluation
- 2.4 Base Excitation: - Important Class of Vibration Analysis - Preventing Excitations From PassingDocument51 pages2.4 Base Excitation: - Important Class of Vibration Analysis - Preventing Excitations From Passingpriyankar007Pas encore d'évaluation
- Plate GirdersDocument34 pagesPlate GirdersSUDHAKAR KUMARPas encore d'évaluation
- STAAD Pro - PDelta AnalysisDocument9 pagesSTAAD Pro - PDelta Analysisswe_maniPas encore d'évaluation
- Project MezzanineDocument2 pagesProject Mezzaninepujan77Pas encore d'évaluation
- Room AcousticsDocument88 pagesRoom AcousticsArunPas encore d'évaluation
- Thermal Stress ExamplesDocument10 pagesThermal Stress ExamplesVishal V BhagwatPas encore d'évaluation
- Methods For Earthquake AnalysisDocument92 pagesMethods For Earthquake Analysisafcis100% (2)
- STRUCTURAL - Chapter 2 - Structural Static Analysis (UP19980818)Document36 pagesSTRUCTURAL - Chapter 2 - Structural Static Analysis (UP19980818)Rory Cristian Cordero RojoPas encore d'évaluation
- Kirby Sheeting Panel Charts PDFDocument2 pagesKirby Sheeting Panel Charts PDFAnonymous ELujOV3Pas encore d'évaluation
- Capacities of UB SectionsDocument48 pagesCapacities of UB SectionsRohan KarandePas encore d'évaluation
- IEC - 60034-17 - 2002 Motor Induccion Con VDFDocument22 pagesIEC - 60034-17 - 2002 Motor Induccion Con VDFnovitopoPas encore d'évaluation
- Direct Analysis Method Stability DesignDocument25 pagesDirect Analysis Method Stability Designferi046Pas encore d'évaluation
- Direct Analysis Method Stability DesignDocument25 pagesDirect Analysis Method Stability Designferi046Pas encore d'évaluation
- BASEPLT9Document27 pagesBASEPLT9Homero Silva100% (3)
- Asce 7Document20 pagesAsce 7Anonymous tBhJoH5wgMPas encore d'évaluation
- UB5 Steel Beam Analysis & Design (BS5950Document4 pagesUB5 Steel Beam Analysis & Design (BS5950yambalaoingjrPas encore d'évaluation
- Design of Welded StructuresDocument837 pagesDesign of Welded Structuresconstantinoiu cora100% (2)
- Analysis and Design of Building 3Document6 pagesAnalysis and Design of Building 3ReubenPas encore d'évaluation
- AutoCAD in 7 Days - SampleDocument36 pagesAutoCAD in 7 Days - SampleHaji AliPas encore d'évaluation
- Seismic Soil-Structure Interaction in BuildingsDocument14 pagesSeismic Soil-Structure Interaction in Buildingsahha65100% (2)
- STRUCTURAL - Chapter 14 - Explicit Dynamics Analysis (UP19980818)Document26 pagesSTRUCTURAL - Chapter 14 - Explicit Dynamics Analysis (UP19980818)Rory Cristian Cordero RojoPas encore d'évaluation
- Sherman - Extended Shear TabsDocument148 pagesSherman - Extended Shear TabsRohan KarandePas encore d'évaluation
- Tesis OffshoreDocument265 pagesTesis OffshoreRosalita Cordaro100% (1)
- 06 Eurocodes Steel Workshop WALDDocument136 pages06 Eurocodes Steel Workshop WALDIonut SavaPas encore d'évaluation
- Lux Simulation Report 10.8.2018wDocument12 pagesLux Simulation Report 10.8.2018wChi Kit PhoonPas encore d'évaluation
- STAAD PRO TRAINING TOPICSDocument2 pagesSTAAD PRO TRAINING TOPICSNitesh BhurePas encore d'évaluation
- How Do You Calculate Chequered Plate WeightDocument2 pagesHow Do You Calculate Chequered Plate Weightssr11700% (1)
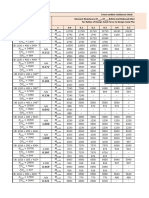
- Calculation Sheet For Car ShedDocument5 pagesCalculation Sheet For Car ShedNasr Abd ElsalamPas encore d'évaluation
- Tekla, Strucures, Hints, And, TipsDocument5 pagesTekla, Strucures, Hints, And, Tipsrk_gprkavi2011Pas encore d'évaluation
- General Catalogue VOL1Document330 pagesGeneral Catalogue VOL1lifib23970Pas encore d'évaluation
- VB 6.0 TutorialsDocument19 pagesVB 6.0 TutorialsSantoshPas encore d'évaluation
- Steel Column Design Eurocode 3Document2 pagesSteel Column Design Eurocode 3Jonp4ul_MiddletonPas encore d'évaluation
- Warehouse DesignDocument3 pagesWarehouse DesignEditor IJTSRDPas encore d'évaluation
- Unit 3 Limit State of ServiceabilityDocument55 pagesUnit 3 Limit State of ServiceabilityManoj SharmaPas encore d'évaluation
- Structural Analysis and Design of Fuel Gas Coalescer Platform FoundationDocument29 pagesStructural Analysis and Design of Fuel Gas Coalescer Platform FoundationsridharPas encore d'évaluation
- PILE FOUNDATION DESIGN Manual Cal - CommentsDocument6 pagesPILE FOUNDATION DESIGN Manual Cal - CommentsDilip PatelPas encore d'évaluation
- Reference Description of Problem Values Units: Infomile SolutionsDocument3 pagesReference Description of Problem Values Units: Infomile SolutionsdhawanaxitPas encore d'évaluation
- API Reinforced Concrete Piles Precast Concrete PilesDocument5 pagesAPI Reinforced Concrete Piles Precast Concrete PilesGnabBangPas encore d'évaluation
- Anchor Bolt Design GuideDocument55 pagesAnchor Bolt Design GuideRajesh N Priya GopinathanPas encore d'évaluation
- Tutorial Ram ConectionDocument17 pagesTutorial Ram ConectionFOXMEXPas encore d'évaluation
- Software Verification: AISC-360-16 Example 004Document4 pagesSoftware Verification: AISC-360-16 Example 004alejandro mantillaPas encore d'évaluation
- StruCad Evolution Getting Started TutorialDocument41 pagesStruCad Evolution Getting Started Tutorialnifty25Pas encore d'évaluation
- Load Combination For Steel Design Per BS en 1990 EditionDocument2 pagesLoad Combination For Steel Design Per BS en 1990 EditionAsaru Deen100% (1)
- GS. Load Types in STAAD - ProDocument2 pagesGS. Load Types in STAAD - ProFrancis CayananPas encore d'évaluation
- Computer Aided Engineering Space Gass Tutorial Questions (Beam Frames Trusses)Document9 pagesComputer Aided Engineering Space Gass Tutorial Questions (Beam Frames Trusses)April IngramPas encore d'évaluation
- Tekla Imort From Staad-By Engr. Atul SaxenaDocument54 pagesTekla Imort From Staad-By Engr. Atul SaxenaAtul Kumar Engineer100% (1)
- Huong Dan MegafloorDocument11 pagesHuong Dan Megafloortrung1983Pas encore d'évaluation
- Water Tank Support Structure Design - RISA Tutorial ExampleDocument13 pagesWater Tank Support Structure Design - RISA Tutorial Exampleraghu_mnPas encore d'évaluation
- STAAD Pro Training Chandigarh - StaadDocument2 pagesSTAAD Pro Training Chandigarh - StaadGaurav BargujarPas encore d'évaluation
- RCDC Installation Walkthrough GuideDocument20 pagesRCDC Installation Walkthrough GuideprashantkothariPas encore d'évaluation
- LPG Cylinder Sizes PDFDocument2 pagesLPG Cylinder Sizes PDFIvan ValenciaPas encore d'évaluation
- Exactly The Power You Need.: The NC-B SeriesDocument12 pagesExactly The Power You Need.: The NC-B SeriesbalanPas encore d'évaluation
- RK FacadeDocument52 pagesRK FacadeSunil GavaskarPas encore d'évaluation
- Column LoadsDocument3 pagesColumn LoadsV.m. RajanPas encore d'évaluation
- BS8110 Simply Supported Slab DesignDocument8 pagesBS8110 Simply Supported Slab DesignRavish RavindraPas encore d'évaluation
- Bs5950 Calculation Decking SheetDocument6 pagesBs5950 Calculation Decking SheetKho C Ahl100% (1)
- Load Combination Is 800-2007Document5 pagesLoad Combination Is 800-2007Jitendra PPas encore d'évaluation
- 1657Document29 pages1657TrisonPas encore d'évaluation
- EX02. 2D Beam Analysis (Simply Supported Beam)Document6 pagesEX02. 2D Beam Analysis (Simply Supported Beam)Lisa DiasPas encore d'évaluation
- BS 5950-2000 Example 001Document5 pagesBS 5950-2000 Example 001Anitha Hassan KabeerPas encore d'évaluation
- Exhibition Stand - REV 0Document12 pagesExhibition Stand - REV 0shibu4321Pas encore d'évaluation
- Delta AnalysisDocument1 pageDelta AnalysisTamizhan_KPas encore d'évaluation
- Matriz KG StaadDocument1 pageMatriz KG StaadurdanetanpPas encore d'évaluation
- Release Notes Csi Bridge V 2220Document10 pagesRelease Notes Csi Bridge V 2220hichem titouPas encore d'évaluation
- STAAD Document On Pushover Analysis PDFDocument16 pagesSTAAD Document On Pushover Analysis PDFMustesin AlikhanPas encore d'évaluation
- Psat-1 3 4Document7 pagesPsat-1 3 4Suresh SinghPas encore d'évaluation
- Adv Trans NuclearDocument33 pagesAdv Trans NuclearJose Alberto RodriguezPas encore d'évaluation
- Defining A Linear Static AnalysisDocument4 pagesDefining A Linear Static AnalysisPraveen SreedharanPas encore d'évaluation
- Perform Analysis Tab: Setting DescriptionDocument1 pagePerform Analysis Tab: Setting Descriptionmanoj444_777Pas encore d'évaluation
- CAEfatigue VIBRATION Installation and User Guide ExamplesDocument13 pagesCAEfatigue VIBRATION Installation and User Guide ExamplesHarsha KolarPas encore d'évaluation
- Stiffness Method For BeamsDocument4 pagesStiffness Method For BeamseOzdemir1Pas encore d'évaluation
- 2006-Ultimateflexural Strength Hollow SectionsDocument7 pages2006-Ultimateflexural Strength Hollow Sectionsvijay2192Pas encore d'évaluation
- John F. Harvey - Theory and Design of Modern Pressure Vessels PDFDocument5 pagesJohn F. Harvey - Theory and Design of Modern Pressure Vessels PDFRohan KarandePas encore d'évaluation
- T Section Properties CalcDocument3 pagesT Section Properties CalcRohan KarandePas encore d'évaluation
- Curved Beam With Restrained Ends Unit 3Document7 pagesCurved Beam With Restrained Ends Unit 3Parthibann RadhabosePas encore d'évaluation
- Design of Members: Rui SimõesDocument53 pagesDesign of Members: Rui SimõesciposPas encore d'évaluation
- AISC Shapes Database v14.1Document18 pagesAISC Shapes Database v14.1pazz0Pas encore d'évaluation
- SteelDesign LTB Fu NewDocument36 pagesSteelDesign LTB Fu NewRohan KarandePas encore d'évaluation
- 30 Good Rules for Cost-Effective Connection DesignDocument4 pages30 Good Rules for Cost-Effective Connection Designมานะ จรูญพงษ์ศักดิ์Pas encore d'évaluation
- 13-Gb Good and Bad DetailingDocument6 pages13-Gb Good and Bad Detailingjunhe898Pas encore d'évaluation
- T Section Properties CalculatorDocument3 pagesT Section Properties CalculatorRohan KarandePas encore d'évaluation
- Fundamentals of Beam Bracing PDFDocument16 pagesFundamentals of Beam Bracing PDFGautham AllimuthuPas encore d'évaluation
- Behavior of Flush and Extended End-Plate Beam-To-ColumnDocument11 pagesBehavior of Flush and Extended End-Plate Beam-To-ColumnRohan KarandePas encore d'évaluation
- AISC High Strength Bolts Webinar Handout - 4per PDFDocument33 pagesAISC High Strength Bolts Webinar Handout - 4per PDFLeviPas encore d'évaluation
- Maheswaran Jeron PDFDocument228 pagesMaheswaran Jeron PDFRohan KarandePas encore d'évaluation
- Fundamentals of Beam Bracing PDFDocument16 pagesFundamentals of Beam Bracing PDFGautham AllimuthuPas encore d'évaluation
- Tubular Strength Comparison of Offshore Jacket Structures Under Api Rp2a and Iso 19902Document10 pagesTubular Strength Comparison of Offshore Jacket Structures Under Api Rp2a and Iso 19902Rohan KarandePas encore d'évaluation
- BSC Hs Physics Semester I To Vi CbcegsDocument43 pagesBSC Hs Physics Semester I To Vi CbcegsGerald BrightPas encore d'évaluation
- Airframe Structural Design (Asd)Document10 pagesAirframe Structural Design (Asd)Salim Omer Bamukra Al-MashjariPas encore d'évaluation
- On Sound: Phys130, A04 Dr. Robert MacdonaldDocument24 pagesOn Sound: Phys130, A04 Dr. Robert MacdonaldAlinaBogoiPas encore d'évaluation
- Module 10 - Simple Harmonic MotionDocument6 pagesModule 10 - Simple Harmonic MotionSukhvinder SinghPas encore d'évaluation
- U ManometersDocument28 pagesU ManometersGözde SalkıçPas encore d'évaluation
- Qualifier Study Guide: Office 221 Department of Physics, Florida State University, Tallahassee, FL 32308Document17 pagesQualifier Study Guide: Office 221 Department of Physics, Florida State University, Tallahassee, FL 32308Hussein AlghoulPas encore d'évaluation
- Mentor Graphics White PaperDocument13 pagesMentor Graphics White PaperTang LihuaPas encore d'évaluation
- Crystal OscillatorDocument7 pagesCrystal OscillatorParesh SawantPas encore d'évaluation
- Wind Analysis of Microwave Antenna TowersDocument11 pagesWind Analysis of Microwave Antenna TowersAlexs DiazPas encore d'évaluation
- Vibration and Noise 354: e F T F T F e A T XDocument2 pagesVibration and Noise 354: e F T F T F e A T XMorena MoremoholoPas encore d'évaluation
- Feedback For PhysicistsDocument54 pagesFeedback For PhysicistsGabriel BarcikPas encore d'évaluation
- Handouts On DOMDocument10 pagesHandouts On DOMGitanj ShethPas encore d'évaluation
- Line-Line Short Circuit of Synchronous Machine Illustration of Computer-Aided Machine AnalysisDocument8 pagesLine-Line Short Circuit of Synchronous Machine Illustration of Computer-Aided Machine Analysisdhirajbharat20Pas encore d'évaluation
- Applied Physics Quiz Answer KeyDocument1 pageApplied Physics Quiz Answer KeyKunwar Achint SinghPas encore d'évaluation
- Mid Term Exam Physics QuestionsDocument1 pageMid Term Exam Physics QuestionsMd. Imran AhmedPas encore d'évaluation
- Whitepaper Ncode MethodsforAcceleratingDynamicDurabilityTests V2-Halfpenny PDFDocument19 pagesWhitepaper Ncode MethodsforAcceleratingDynamicDurabilityTests V2-Halfpenny PDFphysicsnewblolPas encore d'évaluation
- Darve Cme104 MatlabDocument24 pagesDarve Cme104 MatlabArjun KumarPas encore d'évaluation
- Cantilever Discussion and ResultDocument12 pagesCantilever Discussion and ResultYewHang SooPas encore d'évaluation
- Dynamics: Vector Mechanics For EngineersDocument32 pagesDynamics: Vector Mechanics For EngineersMadhulaalasa KurmaPas encore d'évaluation
- Oscillations H2 QuestionsDocument37 pagesOscillations H2 QuestionsCealaPas encore d'évaluation
- PC-Sample QuestionsDocument24 pagesPC-Sample QuestionsHeather EllainePas encore d'évaluation