Vous aimerez peut-être aussi
- Modelado Bola BarraDocument22 pagesModelado Bola BarraJosé Victor Zaconeta FloresPas encore d'évaluation
- Controlador en El Espacio de Estados para Un Sistema de Suspensión de Un AutobusDocument10 pagesControlador en El Espacio de Estados para Un Sistema de Suspensión de Un AutobusFrank Huaylinos VelasquezPas encore d'évaluation
- LAB01 - Informe Pendulo InvertidoDocument25 pagesLAB01 - Informe Pendulo InvertidosaulPas encore d'évaluation
- Tarea 3 Reduccion de SistemasDocument15 pagesTarea 3 Reduccion de SistemasJunior FigueroaPas encore d'évaluation
- Guia Ejercicios Prueba de HipotesisDocument2 pagesGuia Ejercicios Prueba de HipotesisAndrewx PereaPas encore d'évaluation
- RES SEIC - 237-98 Regimen Tarifario DistribuidorasDocument22 pagesRES SEIC - 237-98 Regimen Tarifario DistribuidorasamoniccesarPas encore d'évaluation
- Proyecto FinalDocument16 pagesProyecto FinalMiguel CastroPas encore d'évaluation
- El Péndulo InvertidoDocument14 pagesEl Péndulo InvertidoAndre Santiago Vega QuispePas encore d'évaluation
- Pendulo Invertido AnalisisDocument3 pagesPendulo Invertido AnalisisSebastian SaltosPas encore d'évaluation
- Trabajo 1 Control SISO AlexisZDocument22 pagesTrabajo 1 Control SISO AlexisZJason GreenPas encore d'évaluation
- Péndulo InvertidoDocument61 pagesPéndulo InvertidoVR DanPas encore d'évaluation
- CTM Ejemplo - Péndulo Invertido - Modelación PDFDocument8 pagesCTM Ejemplo - Péndulo Invertido - Modelación PDFWilson Barco MPas encore d'évaluation
- Ejercicios Controladores PidDocument70 pagesEjercicios Controladores PidJulita Nelson GordonPas encore d'évaluation
- Diseño de Controladores y ObservadoresDocument11 pagesDiseño de Controladores y ObservadoresOmar Gibrahin Hernandez UribePas encore d'évaluation
- Péndulo InvertidoDocument14 pagesPéndulo InvertidoRodolfoReyes-Báez100% (1)
- Practica 3. Espacio de EstadoDocument21 pagesPractica 3. Espacio de EstadoLUISPas encore d'évaluation
- Marco Teorico DinamicaDocument19 pagesMarco Teorico DinamicaEdwin YauliPas encore d'évaluation
- SIMULINK - EcuacionesDocument11 pagesSIMULINK - EcuacionesIan Alexander LopezPas encore d'évaluation
- Copia de Evaluacion-2-Controladores-IndustrialesDocument10 pagesCopia de Evaluacion-2-Controladores-IndustrialesEdison ConchaPas encore d'évaluation
- Modelamiento Masa Resorte PDFDocument11 pagesModelamiento Masa Resorte PDFErick Eduardo Cancho PusePas encore d'évaluation
- Desarrollo de Sistemas Dinámicos Animados en MatlabDocument8 pagesDesarrollo de Sistemas Dinámicos Animados en MatlabDaniel OlmedoPas encore d'évaluation
- Trabajo Colaborativo 1 Sistemas Dinamicos EntregadoDocument20 pagesTrabajo Colaborativo 1 Sistemas Dinamicos EntregadokamiloGOVAR100% (1)
- Función de TransferenciaDocument7 pagesFunción de TransferenciaJhonatan EstradaPas encore d'évaluation
- Modelamiento Matematico de Sistemas Matlab PDFDocument12 pagesModelamiento Matematico de Sistemas Matlab PDFjuan carlos revillaPas encore d'évaluation
- Control Optimo Pendulo Invertido QyRDocument10 pagesControl Optimo Pendulo Invertido QyRChicho Esau Gutierrez TantarunaPas encore d'évaluation
- Documento Completo ModeladoDocument52 pagesDocumento Completo ModeladoRaul Roque YujraPas encore d'évaluation
- Transformada de Laplace Con MatlabDocument7 pagesTransformada de Laplace Con MatlabJavier Lozano MarrerosPas encore d'évaluation
- Matriz Jacobiana de Un RobotDocument6 pagesMatriz Jacobiana de Un RobotgloretogPas encore d'évaluation
- 5 Respuesta TransitoriaDocument11 pages5 Respuesta TransitoriaAmanda GarcíaPas encore d'évaluation
- Laboratorio 1 ModeladoDocument16 pagesLaboratorio 1 ModeladoDaniel Mejía VanegasPas encore d'évaluation
- Linealizacion de Un Modelo Matematico No LinealDocument7 pagesLinealizacion de Un Modelo Matematico No LinealJosePas encore d'évaluation
- Control de Un Robot Tipo RRDocument10 pagesControl de Un Robot Tipo RRzeuszetaPas encore d'évaluation
- Lab 3 Sistemas de Control 30092021Document9 pagesLab 3 Sistemas de Control 30092021Adalid elaprendizPas encore d'évaluation
- Analisis de Sistemas en El Espacio de Estados.Document7 pagesAnalisis de Sistemas en El Espacio de Estados.Paul Guillen100% (2)
- Funciones Comandos en MatlabDocument11 pagesFunciones Comandos en Matlabjohnelectronica50% (2)
- Control Ejercicios de PidDocument66 pagesControl Ejercicios de PidMundoPic MundoPicPas encore d'évaluation
- Laboratorio 1 de SeñalesDocument9 pagesLaboratorio 1 de SeñalesGustavo LapaPas encore d'évaluation
- Ejercicios Control PDFDocument4 pagesEjercicios Control PDFAnthony YVPas encore d'évaluation
- Sistema de Seguimiento Con IntegradorDocument5 pagesSistema de Seguimiento Con IntegradorJefry CordovaPas encore d'évaluation
- Análisis de Posición Del Mecanismo de Biela-Manivela-CorrederaDocument9 pagesAnálisis de Posición Del Mecanismo de Biela-Manivela-CorrederaAlex L. Puerto100% (3)
- Pendulo Invertido ModeladoDocument6 pagesPendulo Invertido ModeladoSebastian SaltosPas encore d'évaluation
- Tarea 5Document9 pagesTarea 5JHLPas encore d'évaluation
- CTM - Ejemplo de Control Digital - Péndulo Invertido PDFDocument14 pagesCTM - Ejemplo de Control Digital - Péndulo Invertido PDFWilson Barco MPas encore d'évaluation
- Desarrollo de Sistemas Dinámicos Animados en MatlabDocument8 pagesDesarrollo de Sistemas Dinámicos Animados en MatlabDanielOlmedoNavarretePas encore d'évaluation
- Labo03-Mat Apl ElecDocument19 pagesLabo03-Mat Apl ElecLuis Carlos Garcia PeraltaPas encore d'évaluation
- Lab TC 2Document4 pagesLab TC 2ReyesArangurenJuanPas encore d'évaluation
- Modelos Matematicos y Funciones de TransferenciaDocument12 pagesModelos Matematicos y Funciones de TransferenciaFHERFFFPas encore d'évaluation
- Cálculo Experimental de La Constante Equivalente de Un Sistema de ResortesDocument31 pagesCálculo Experimental de La Constante Equivalente de Un Sistema de ResortesAlejo Costa100% (1)
- Lab 2 Etn-702Document14 pagesLab 2 Etn-702Ivan Quispe LugoPas encore d'évaluation
- Taller No1 Modelamiento ElectromecanicoDocument4 pagesTaller No1 Modelamiento ElectromecanicojerioscPas encore d'évaluation
- INTERPOLACION Metodos NumericosDocument12 pagesINTERPOLACION Metodos NumericosPeter PittmanPas encore d'évaluation
- Problemas de Ingenieria de Control IDocument11 pagesProblemas de Ingenieria de Control IAnonymous AUTTUBPas encore d'évaluation
- Lab Compensador Adelanto y AtrasoDocument9 pagesLab Compensador Adelanto y AtrasoSebastian BeltranPas encore d'évaluation
- Aproximacion Funciones Con MatlabDocument49 pagesAproximacion Funciones Con MatlabMichael GastelluPas encore d'évaluation
- 4 - MARCO - TEORICOl - LM - IV RoxDocument33 pages4 - MARCO - TEORICOl - LM - IV RoxRogerPas encore d'évaluation
- Control de Temperatura Con PID Aplicando El Metodo de La Curva de ReaccionDocument10 pagesControl de Temperatura Con PID Aplicando El Metodo de La Curva de ReaccionTherion456Pas encore d'évaluation
- ProyectoDocument18 pagesProyectoEdwar Cordova QuiquiaPas encore d'évaluation
- Ejercicios de Integrales de Línea, Superficie y VolumenD'EverandEjercicios de Integrales de Línea, Superficie y VolumenÉvaluation : 4 sur 5 étoiles4/5 (2)
- Actividad 3 Tarea 2 219005 1Document18 pagesActividad 3 Tarea 2 219005 1Andrewx PereaPas encore d'évaluation
- 4.5.1.2 Packet Tracer - Skills Integration Challenge InstructionsDocument2 pages4.5.1.2 Packet Tracer - Skills Integration Challenge InstructionsAndrewx PereaPas encore d'évaluation
- Acceso Ejercicio 4.5.1.2Document15 pagesAcceso Ejercicio 4.5.1.2Andrewx PereaPas encore d'évaluation
- 4.4.2.2 Packet Tracer - Configuring Wireless LAN Access InstructionsDocument3 pages4.4.2.2 Packet Tracer - Configuring Wireless LAN Access InstructionsAndrewx PereaPas encore d'évaluation
- Evaluacion Diagnostica de AprendizajeDocument5 pagesEvaluacion Diagnostica de AprendizajeAndrewx PereaPas encore d'évaluation
- Sondeo de Conocimiento MatematicasDocument5 pagesSondeo de Conocimiento MatematicasAndrewx PereaPas encore d'évaluation
- Silueta Textual Guía de AprendizajeDocument2 pagesSilueta Textual Guía de AprendizajeDorian Miguel Ospino CaroPas encore d'évaluation
- Circuito MixtoDocument4 pagesCircuito MixtoAndrewx PereaPas encore d'évaluation
- Teorema de ChebyshevDocument20 pagesTeorema de ChebyshevAndrewx PereaPas encore d'évaluation
- Refper 2Document2 pagesRefper 2Andrewx PereaPas encore d'évaluation
- Matriz Inversa Paso A Paso en MatlabDocument4 pagesMatriz Inversa Paso A Paso en MatlabAndrewx PereaPas encore d'évaluation
- Ejercicios Prueba de HipotesisDocument7 pagesEjercicios Prueba de HipotesisAndrewx PereaPas encore d'évaluation
- Practica No 2Document16 pagesPractica No 2ALAN GONZALEZ ACOSTAPas encore d'évaluation
- BalotarioDocument5 pagesBalotarioJenifer RamosPas encore d'évaluation
- ConsolidaciónDocument12 pagesConsolidaciónCarlos Alberto Bonet AlvarezPas encore d'évaluation
- Regla de Las FasesDocument8 pagesRegla de Las FasesnicolasPas encore d'évaluation
- Introducción de La FísicaDocument8 pagesIntroducción de La FísicacarlosPas encore d'évaluation
- S09. Práctica de Conservación de La EnergíaDocument2 pagesS09. Práctica de Conservación de La EnergíaFernando Roca GonzalesPas encore d'évaluation
- PLAN MEJORAMIENTO 1P Física 1109Document1 pagePLAN MEJORAMIENTO 1P Física 1109Aileen KarinaPas encore d'évaluation
- 1.1 Definición de Un Vector en R2 y R3, y Su Interpretación Geométrica.Document9 pages1.1 Definición de Un Vector en R2 y R3, y Su Interpretación Geométrica.BeTo MartinezPas encore d'évaluation
- Carga y Descarga Capacitores-Pract 7-P.Grupo 2-Lab. Electromangnetismo-Grupo CDocument7 pagesCarga y Descarga Capacitores-Pract 7-P.Grupo 2-Lab. Electromangnetismo-Grupo CDANIELA ALEXANDRA EMBUS GAVIRIAPas encore d'évaluation
- Informe 1 de Quimica Fisica BoyleDocument12 pagesInforme 1 de Quimica Fisica BoyleMaría Gabriela GuevaraPas encore d'évaluation
- Cinetica de Una Partícula - Fuerza y Aceleracion Coord. Cartesianas - 2020-IIDocument13 pagesCinetica de Una Partícula - Fuerza y Aceleracion Coord. Cartesianas - 2020-IISecundo Saúl100% (1)
- Informe Final UNILEVER 5Document70 pagesInforme Final UNILEVER 5Julio Perez100% (1)
- Informe Motor DCDocument28 pagesInforme Motor DCDanny RiveraPas encore d'évaluation
- El Autor Del UniversoDocument141 pagesEl Autor Del UniversoXimo FerrerPas encore d'évaluation
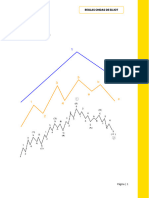
- Reglas Ondas de ElliotDocument15 pagesReglas Ondas de ElliotSamuel SorianoPas encore d'évaluation
- Calculo de Potencia para La Compra de Grupo ElectrogenoDocument1 pageCalculo de Potencia para La Compra de Grupo ElectrogenoEdgar Joel Ruiz PradoPas encore d'évaluation
- Guia 8 III TrimestreDocument38 pagesGuia 8 III TrimestreeduardoPas encore d'évaluation
- MECÁNICA DE FLUIDOS: Análisis Dimensional y SimilitudDocument15 pagesMECÁNICA DE FLUIDOS: Análisis Dimensional y SimilitudCristian Pachon Corredor0% (1)
- Práctico 3Document2 pagesPráctico 3Andrea CampsPas encore d'évaluation
- Tipos de Actuadores AngelDocument9 pagesTipos de Actuadores AngelIsraelRamonAnthuanPas encore d'évaluation
- Efecto Corana y SkinDocument1 pageEfecto Corana y SkinMemo Romero HernandezPas encore d'évaluation
- Acumulador de Orgón - ManualDocument6 pagesAcumulador de Orgón - Manualelnarigazo100% (2)
- Lab 6 - Fenómenos MagnéticosDocument9 pagesLab 6 - Fenómenos MagnéticosGustavo DeLa Espriella CruzPas encore d'évaluation
- Guía de Humidificación (Corregida)Document9 pagesGuía de Humidificación (Corregida)Sara CastroPas encore d'évaluation
- Cap04 - Movimiento Del Agua A Través de Suelos Permeabilidad e InfiltraciónDocument12 pagesCap04 - Movimiento Del Agua A Través de Suelos Permeabilidad e Infiltraciónedga19100% (2)
- Reporte de Analisis de VibraciónDocument20 pagesReporte de Analisis de VibraciónJorge Luis SalvadorPas encore d'évaluation
- Problemas - Trabajo y EnergiaDocument2 pagesProblemas - Trabajo y EnergiaAnonymous kzl75IeTX5Pas encore d'évaluation
- Operaciones Unitarias Ejercicio 2Document2 pagesOperaciones Unitarias Ejercicio 2Jefferson Benitez MPas encore d'évaluation
- Modelacion Dinamica de Sistemas de ControlDocument15 pagesModelacion Dinamica de Sistemas de ControlCarlozs Luizs'100% (2)