Vous aimerez peut-être aussi
- Mems ActuatorDocument10 pagesMems ActuatorRohith RajPas encore d'évaluation
- Free Energy Generator Construction Guidelines For A Zero Point Energy ConverterDocument67 pagesFree Energy Generator Construction Guidelines For A Zero Point Energy ConverterDan BeesonPas encore d'évaluation
- Calculation of Unbalanced Magnetic Pull in A Salient-Pole Synchronous GeneratorDocument7 pagesCalculation of Unbalanced Magnetic Pull in A Salient-Pole Synchronous GeneratorNirav PathakPas encore d'évaluation
- Smart Materials and Structures: International WorkshopDocument10 pagesSmart Materials and Structures: International WorkshopPartha SarathiiPas encore d'évaluation
- Tangential DriveDocument5 pagesTangential Drivecopkutusu2012Pas encore d'évaluation
- Italy 2014ugm Magnetostatic Analysis Iter TestDocument23 pagesItaly 2014ugm Magnetostatic Analysis Iter TestphisitlaiPas encore d'évaluation
- Formulation of Stiffness Constant and Effective Mass For A Folded Beam PDFDocument14 pagesFormulation of Stiffness Constant and Effective Mass For A Folded Beam PDFSabino HectorCamposPas encore d'évaluation
- Decentralized PI/PD Position Control For Active Magnetic BearingsDocument7 pagesDecentralized PI/PD Position Control For Active Magnetic BearingsMuhammadPas encore d'évaluation
- 31 Asif1Document5 pages31 Asif1Vijay KumarPas encore d'évaluation
- Vibration Control Simulation of Beams With Piezoelectric Actuators Using Impedance and FemDocument5 pagesVibration Control Simulation of Beams With Piezoelectric Actuators Using Impedance and FemHoang-Long CaoPas encore d'évaluation
- Electromagnetic Scattering From Chiral MediaDocument4 pagesElectromagnetic Scattering From Chiral MediaTouseef HayatPas encore d'évaluation
- PM Linear ActuatorDocument7 pagesPM Linear ActuatorGthulasi78Pas encore d'évaluation
- X Y Ei Y Y Ei Y Y X Ei Y Y: Smart Mater. Struct. 18 (2009) 115012 YchenetalDocument1 pageX Y Ei Y Y Ei Y Y X Ei Y Y: Smart Mater. Struct. 18 (2009) 115012 YchenetalelishirinPas encore d'évaluation
- Sensors: Effect of External Vibration On PZT Impedance SignatureDocument14 pagesSensors: Effect of External Vibration On PZT Impedance SignatureSai SivaPas encore d'évaluation
- Optimal Energy Density Piezoelectric Twisting Actuators: Benjamin M. Finio and Robert J. WoodDocument6 pagesOptimal Energy Density Piezoelectric Twisting Actuators: Benjamin M. Finio and Robert J. WoodHumair ShaheenPas encore d'évaluation
- Arnautov 1983Document8 pagesArnautov 1983kevin gelaudePas encore d'évaluation
- JESV5SI0109Document5 pagesJESV5SI0109Kiran YaddanapudiPas encore d'évaluation
- Calculation and Measuring of Low-Frequency Magnetic Field of 10 (20) /0,4 KV Transformer Station PrefaceDocument11 pagesCalculation and Measuring of Low-Frequency Magnetic Field of 10 (20) /0,4 KV Transformer Station Prefaceh_salkicPas encore d'évaluation
- Some Recent Developments in Acceleration Sensors: George Juraj STEINDocument4 pagesSome Recent Developments in Acceleration Sensors: George Juraj STEINuamiranda3518Pas encore d'évaluation
- Design and Simulation of Control System For Bearingless Synchronous Reluctance Motor PDFDocument5 pagesDesign and Simulation of Control System For Bearingless Synchronous Reluctance Motor PDFKrishnam NaiduPas encore d'évaluation
- 07a72101-Vibrations and Structural DynamicsDocument8 pages07a72101-Vibrations and Structural Dynamicspoornima reddyPas encore d'évaluation
- Af 65Document10 pagesAf 65he maPas encore d'évaluation
- Tri-Axial Sensors and Actuators Made of A Single Piezoelectric Cylindrical ShellDocument6 pagesTri-Axial Sensors and Actuators Made of A Single Piezoelectric Cylindrical ShellAnubhav KumarPas encore d'évaluation
- Three-Dimensional Magnetotelluric Forward Modeling For Static-Shifted ModelDocument4 pagesThree-Dimensional Magnetotelluric Forward Modeling For Static-Shifted ModelSiti Reiwanti AuliyaniPas encore d'évaluation
- Sitti Al 2001Document8 pagesSitti Al 2001scribdcheeallePas encore d'évaluation
- Prediction of Stability and Performance of An Active Mechanical Structure Under Uncertainty Conditions Using Finite Element and Neural ComputationDocument8 pagesPrediction of Stability and Performance of An Active Mechanical Structure Under Uncertainty Conditions Using Finite Element and Neural ComputationHadhoud MécaniquePas encore d'évaluation
- Advanced Beam Analysis For Integrated ModellingDocument10 pagesAdvanced Beam Analysis For Integrated ModellingnrmaheshPas encore d'évaluation
- Atomic Photoionization in The Born Approximation and Angular Distribution of PhotoelectronsDocument13 pagesAtomic Photoionization in The Born Approximation and Angular Distribution of Photoelectronspcd09Pas encore d'évaluation
- Actuator Fault Detection System For A Mini-Quadrotor: A. Freddi, S. Longhi and A. MonteriùDocument6 pagesActuator Fault Detection System For A Mini-Quadrotor: A. Freddi, S. Longhi and A. MonteriùadilsondissoPas encore d'évaluation
- 190-196 AlqassarDocument7 pages190-196 AlqassarSumartono SaribPas encore d'évaluation
- Analysis of Tapered Beam Piezoelectric Energy HarvestersDocument4 pagesAnalysis of Tapered Beam Piezoelectric Energy HarvestersshikhamaharanaPas encore d'évaluation
- Simulation of Piezoelectric Devices by Two - and Three-Dimensional Finite ElementsDocument15 pagesSimulation of Piezoelectric Devices by Two - and Three-Dimensional Finite Elementszhangcwy1225Pas encore d'évaluation
- Fyp Related PaperDocument10 pagesFyp Related PaperhinaPas encore d'évaluation
- IJCER (WWW - Ijceronline.com) International Journal of Computational Engineering ResearchDocument8 pagesIJCER (WWW - Ijceronline.com) International Journal of Computational Engineering ResearchInternational Journal of computational Engineering research (IJCER)Pas encore d'évaluation
- Active Feedbackdamping SystemDocument11 pagesActive Feedbackdamping SystemAkash AkuPas encore d'évaluation
- Dynamic Characterisation OF A Flexible Manipulator System: Theory and ExperimentsDocument6 pagesDynamic Characterisation OF A Flexible Manipulator System: Theory and ExperimentsselvamPas encore d'évaluation
- 1111 2524 PDFDocument15 pages1111 2524 PDFEsthi KusumaPas encore d'évaluation
- Vibration Energy Harvesting Using Single and Comb-Shaped Piezoelectric Beam Structures: Modeling and SimulationDocument7 pagesVibration Energy Harvesting Using Single and Comb-Shaped Piezoelectric Beam Structures: Modeling and SimulationAmir JoonPas encore d'évaluation
- Shibuya, Y. Fujita, S. Tamaki, E. - Analysis of Very Fast Transients in TransforDocument7 pagesShibuya, Y. Fujita, S. Tamaki, E. - Analysis of Very Fast Transients in TransforJiraya15Pas encore d'évaluation
- Machine Dynamics Lecture Notes SKMDDocument151 pagesMachine Dynamics Lecture Notes SKMDelizPas encore d'évaluation
- Circular WaveguideDocument19 pagesCircular WaveguideLam DinhPas encore d'évaluation
- Principles of Electromechanical Energy ConversionDocument21 pagesPrinciples of Electromechanical Energy ConversionJehovah CoelhoPas encore d'évaluation
- Gear Fault Detection Using The Geometric Properties of Electrical Currents in Three-Phase Induction Motor-Based SystemsDocument12 pagesGear Fault Detection Using The Geometric Properties of Electrical Currents in Three-Phase Induction Motor-Based SystemsydydPas encore d'évaluation
- Microwave-Propelled Sails and Their ControlDocument6 pagesMicrowave-Propelled Sails and Their ControlmegustalazorraPas encore d'évaluation
- Application of Artificial Ground Planes in Dual-Band Orthogonally-Polarized Low-Profile High-Gain Planar Antenna Design A. Foroozesh, M. Ngmou Kehn, and L. ShafaiDocument30 pagesApplication of Artificial Ground Planes in Dual-Band Orthogonally-Polarized Low-Profile High-Gain Planar Antenna Design A. Foroozesh, M. Ngmou Kehn, and L. Shafaieng1364Pas encore d'évaluation
- 6GHz Septum PolarizerDocument14 pages6GHz Septum PolarizerJoseph EdwardsPas encore d'évaluation
- Differential Forms on Electromagnetic NetworksD'EverandDifferential Forms on Electromagnetic NetworksÉvaluation : 4 sur 5 étoiles4/5 (1)
- ZFGHFGHFGDocument6 pagesZFGHFGHFGAhmad Firdaus Zawawil AnwarPas encore d'évaluation
- Analysis of Electromagnetic Field Effects Using FEM For Transmission Lines TranspositionDocument5 pagesAnalysis of Electromagnetic Field Effects Using FEM For Transmission Lines TranspositionFelipe BelarminoPas encore d'évaluation
- Opticon ManualDocument31 pagesOpticon ManualVirginTebowPas encore d'évaluation
- Vibration Calculations in A Electric MotorDocument14 pagesVibration Calculations in A Electric MotorSantiago MolinaPas encore d'évaluation
- Modelo de Ising 2d PDFDocument29 pagesModelo de Ising 2d PDFFidel RomanPas encore d'évaluation
- Jun 03Document13 pagesJun 03Saddam RiazPas encore d'évaluation
- Magnetic Eye TrackingDocument7 pagesMagnetic Eye Trackinghub23Pas encore d'évaluation
- The Nonlinear Dynamics of Electrostatically-Actuated, Single-Walled Carbon Nanotube ResonatorsDocument12 pagesThe Nonlinear Dynamics of Electrostatically-Actuated, Single-Walled Carbon Nanotube Resonatorsteju1996coolPas encore d'évaluation
- Magnetic Levitation.Document7 pagesMagnetic Levitation.komedimetrotvPas encore d'évaluation
- Fault Detection and Isolation in UAVDocument6 pagesFault Detection and Isolation in UAVHridAy BavlePas encore d'évaluation
- Open Mathematics: Black-Scholes Equation and The Delta Hedge of The European Option Under Skew Brownian MotionDocument10 pagesOpen Mathematics: Black-Scholes Equation and The Delta Hedge of The European Option Under Skew Brownian MotionDavide MaranoPas encore d'évaluation
- CHENG Gear Tooth GeometryDocument11 pagesCHENG Gear Tooth GeometryDavide MaranoPas encore d'évaluation
- Open Mathematics: Statistical ($/alpha ,/varphi) $-ConnectionsDocument11 pagesOpen Mathematics: Statistical ($/alpha ,/varphi) $-ConnectionsDavide MaranoPas encore d'évaluation
- Research Article: Model Reduction of The Flexible Rotating Crankshaft of A Motorcycle Engine CranktrainDocument10 pagesResearch Article: Model Reduction of The Flexible Rotating Crankshaft of A Motorcycle Engine CranktrainDavide MaranoPas encore d'évaluation
- 8 ?5 @A7 Ÿ B Cadÿ Efÿ 7 G67 5:Ÿ Ehbf Hfÿ: 8Ÿ Eiÿ ?5 at Ÿ K:?Ÿ Elÿ 7 G67 5:Ÿ EhbfDocument2 pages8 ?5 @A7 Ÿ B Cadÿ Efÿ 7 G67 5:Ÿ Ehbf Hfÿ: 8Ÿ Eiÿ ?5 at Ÿ K:?Ÿ Elÿ 7 G67 5:Ÿ EhbfDavide MaranoPas encore d'évaluation
- Sound System Design - 1Document89 pagesSound System Design - 1Davide MaranoPas encore d'évaluation
- My Foolish Heart Transcript PDFDocument3 pagesMy Foolish Heart Transcript PDFDavide Marano100% (1)
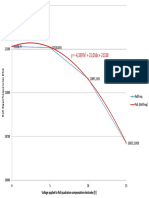
- Roll Eigenfrequencies Interpolation: Voltage Applied To Roll Quadrature Compensation Electrodes (V)Document1 pageRoll Eigenfrequencies Interpolation: Voltage Applied To Roll Quadrature Compensation Electrodes (V)Davide MaranoPas encore d'évaluation
- The Effect of Center Distance Change On Gear Teeth EngagementDocument21 pagesThe Effect of Center Distance Change On Gear Teeth EngagementDavide MaranoPas encore d'évaluation
- Rating of Asymmetric Tooth Gears: Alex L. Kapelevich and Yuriy V. ShekhtmanDocument6 pagesRating of Asymmetric Tooth Gears: Alex L. Kapelevich and Yuriy V. ShekhtmanDavide MaranoPas encore d'évaluation
- GT 0916Document84 pagesGT 0916Davide MaranoPas encore d'évaluation
- U2 04 04Document30 pagesU2 04 04Davide MaranoPas encore d'évaluation
- Mems TransducersDocument21 pagesMems TransducersDavide MaranoPas encore d'évaluation
- Odeon ManualDocument195 pagesOdeon ManualDavide MaranoPas encore d'évaluation
- Astm D3350-10Document7 pagesAstm D3350-10Jorge HuarcayaPas encore d'évaluation
- Wastewater Treatment Options For Paper Mills Using Waste Paper/imported Pulps As Raw Materials: Bangladesh PerspectiveDocument4 pagesWastewater Treatment Options For Paper Mills Using Waste Paper/imported Pulps As Raw Materials: Bangladesh PerspectiveKool LokeshPas encore d'évaluation
- Software TestingDocument4 pagesSoftware TestingX DevilXPas encore d'évaluation
- M.3 Pressure Switches Hex 24: Rohs IiDocument18 pagesM.3 Pressure Switches Hex 24: Rohs IiSeyedAli TabatabaeePas encore d'évaluation
- Peugeot 3008 BrochureDocument18 pagesPeugeot 3008 Brochuremihai12movePas encore d'évaluation
- Desmophen 1200 - en - 00134597 17947398 20766463Document3 pagesDesmophen 1200 - en - 00134597 17947398 20766463Sabri AeroChemPas encore d'évaluation
- En Privacy The Best Reseller SMM Panel, Cheap SEO and PR - MRPOPULARDocument4 pagesEn Privacy The Best Reseller SMM Panel, Cheap SEO and PR - MRPOPULARZhenyuan LiPas encore d'évaluation
- Welding Matlab CodeDocument16 pagesWelding Matlab Codevenkat27081995Pas encore d'évaluation
- ISO - 3601-2 O-Rings HousingDocument56 pagesISO - 3601-2 O-Rings HousingAlexey FlidliderPas encore d'évaluation
- University of Mumbai: Syllabus For Sem V & VI Program: B.Sc. Course: PhysicsDocument18 pagesUniversity of Mumbai: Syllabus For Sem V & VI Program: B.Sc. Course: Physicsdbhansali57Pas encore d'évaluation
- MMD 74 XX DR PS 0020 - C03Document1 pageMMD 74 XX DR PS 0020 - C03bramexPas encore d'évaluation
- Alloc 150 DMDocument301 pagesAlloc 150 DMSheik Mohamed ImranPas encore d'évaluation
- Drying AgentDocument36 pagesDrying AgentSo MayePas encore d'évaluation
- Yucca Mountain Safety Evaluation Report - Volume 2Document665 pagesYucca Mountain Safety Evaluation Report - Volume 2The Heritage FoundationPas encore d'évaluation
- ZXComputingDocument100 pagesZXComputingozzy75Pas encore d'évaluation
- Universal USB Installer - Easy As 1 2 3 - USB Pen Drive LinuxDocument4 pagesUniversal USB Installer - Easy As 1 2 3 - USB Pen Drive LinuxAishwarya GuptaPas encore d'évaluation
- Ic703 ServiceDocument57 pagesIc703 Servicewalters2Pas encore d'évaluation
- Rankel Engine.Document16 pagesRankel Engine.Divya Prakash SrivastavaPas encore d'évaluation
- CE 411 Lecture 03 - Moment AreaDocument27 pagesCE 411 Lecture 03 - Moment AreaNophiPas encore d'évaluation
- Seminar Report 2Document25 pagesSeminar Report 2DrMahendra Kumar Gokhroo0% (1)
- Copy Move Forgery Based On DWT-DCTDocument4 pagesCopy Move Forgery Based On DWT-DCTShiva KeePas encore d'évaluation
- Fusible PVC SpecificationsDocument17 pagesFusible PVC Specificationsamir_hayfaPas encore d'évaluation
- Acids and Bases Part 3 (Weak Acids) EdexcelDocument2 pagesAcids and Bases Part 3 (Weak Acids) EdexcelKevin The Chemistry TutorPas encore d'évaluation
- Cloud Computing - Feb-Mar 2017Document40 pagesCloud Computing - Feb-Mar 2017Abhishek SinghPas encore d'évaluation
- Surveying Civil Engineering Pictorial Booklet 15 English MediumDocument125 pagesSurveying Civil Engineering Pictorial Booklet 15 English MediumtnstcnpalanisamyPas encore d'évaluation
- AVR Interrupt Programming in Assembly and CDocument38 pagesAVR Interrupt Programming in Assembly and CK142526 AlishanPas encore d'évaluation
- 4 MPM Scope - OutputDocument45 pages4 MPM Scope - OutputSajid Ali MaariPas encore d'évaluation
- Language Processing System:-: CompilerDocument6 pagesLanguage Processing System:-: CompilerRenganathan rameshPas encore d'évaluation
- CatalogDocument76 pagesCatalogmkpasha55mpPas encore d'évaluation
- Green Line TransformerDocument4 pagesGreen Line TransformerwakasPas encore d'évaluation