Vous aimerez peut-être aussi
- Fundamentals of Aeroacoustics with Applications to Aeropropulsion Systems: Elsevier and Shanghai Jiao Tong University Press Aerospace SeriesD'EverandFundamentals of Aeroacoustics with Applications to Aeropropulsion Systems: Elsevier and Shanghai Jiao Tong University Press Aerospace SeriesPas encore d'évaluation
- Induccion de Ruido en Matteriales Por Medio de VibracionesDocument9 pagesInduccion de Ruido en Matteriales Por Medio de VibracionesAgg GlezPas encore d'évaluation
- Designing Environmental SoundsDocument5 pagesDesigning Environmental SoundsJunona TutuneaPas encore d'évaluation
- Haptics in Computer Music: A Paradigm ShiftDocument4 pagesHaptics in Computer Music: A Paradigm ShiftipiresPas encore d'évaluation
- Tools - For - Studying - Spectral - Temporal - Effects - of - Noise - 2010 INTERNOISE - 511Document10 pagesTools - For - Studying - Spectral - Temporal - Effects - of - Noise - 2010 INTERNOISE - 511Rami MalekPas encore d'évaluation
- A Percussive Sound Synthesizer Based On Physical and Perceptual AttributesDocument10 pagesA Percussive Sound Synthesizer Based On Physical and Perceptual AttributesΜέμνων ΜπερδεμένοςPas encore d'évaluation
- Experimental Study of Real Gear Transmission Defects Using Sound PerceptionDocument14 pagesExperimental Study of Real Gear Transmission Defects Using Sound PerceptionRamdane YounesPas encore d'évaluation
- Realtime and Accurate Musical Control ofDocument9 pagesRealtime and Accurate Musical Control ofgerardo7martinez-13Pas encore d'évaluation
- Stiff StringsDocument15 pagesStiff StringsaffiomaPas encore d'évaluation
- CMJ 2011Document31 pagesCMJ 2011Nesma DarwishPas encore d'évaluation
- AuralizationDocument10 pagesAuralizationguzskaPas encore d'évaluation
- From Sound Modeling To Analysis-Synthesis of Sounds: 1 Scope of The ArticleDocument9 pagesFrom Sound Modeling To Analysis-Synthesis of Sounds: 1 Scope of The ArticleSlavyana DraganovaPas encore d'évaluation
- 7482-Article Text-7359-1-1-20190718Document11 pages7482-Article Text-7359-1-1-20190718luca.valzanoPas encore d'évaluation
- Structured Additive Synthesis: Towards A Model of Sound Timbre and Electroacoustic Music FormsDocument4 pagesStructured Additive Synthesis: Towards A Model of Sound Timbre and Electroacoustic Music FormsJuan Ignacio Isgro100% (1)
- A Paradigm For Physical Interaction With Sound in 3-D Audio SpaceDocument9 pagesA Paradigm For Physical Interaction With Sound in 3-D Audio SpaceRicardo Cubillos PeñaPas encore d'évaluation
- An Experimental Study of Interior Vehicle Roughness Noise From Disc Brake SystemsDocument11 pagesAn Experimental Study of Interior Vehicle Roughness Noise From Disc Brake SystemsashwaniPas encore d'évaluation
- Enhancing Sound Description in VRML: Alexandre Topol, Florent SchaefferDocument9 pagesEnhancing Sound Description in VRML: Alexandre Topol, Florent SchaefferKorn รักนายหลวงPas encore d'évaluation
- Morphing Techniques For Enhanced Scat SingingDocument4 pagesMorphing Techniques For Enhanced Scat SingingMilton Villarroel G.Pas encore d'évaluation
- Soundscape ThesisDocument8 pagesSoundscape Thesislisajonesshreveport100% (2)
- A Method For Sound Synthesis Based On The Evolutionary Computation of Genetic AlgorithmsDocument10 pagesA Method For Sound Synthesis Based On The Evolutionary Computation of Genetic AlgorithmsBobPas encore d'évaluation
- Augmenting Environmental InteractionDocument15 pagesAugmenting Environmental InteractionSaaj Alfred JarryPas encore d'évaluation
- Compositional Procedures in Tensio: Philippe ManouryDocument38 pagesCompositional Procedures in Tensio: Philippe ManouryVinicius Cesar OliveiraPas encore d'évaluation
- Aes2001 Bonada PDFDocument10 pagesAes2001 Bonada PDFjfkPas encore d'évaluation
- Herrero - Acoustic Noise Reduction Methods For The Launch PadDocument162 pagesHerrero - Acoustic Noise Reduction Methods For The Launch PadrabiabeyzadoanPas encore d'évaluation
- Acoustic Environment ClassificationDocument10 pagesAcoustic Environment ClassificationSyukriNizamPas encore d'évaluation
- FFT Analysis As A Creative Tool in Live PDFDocument4 pagesFFT Analysis As A Creative Tool in Live PDFjluispostigaPas encore d'évaluation
- Rethinking The Box: Approaches To The Reality of Electronic Music PerformanceDocument12 pagesRethinking The Box: Approaches To The Reality of Electronic Music PerformanceMatthias StrassmüllerPas encore d'évaluation
- Convention Paper 5452: Audio Engineering SocietyDocument10 pagesConvention Paper 5452: Audio Engineering SocietyNathalia Parra GarzaPas encore d'évaluation
- The Columbine Massacre - Barack Obama - Zionist Wolf in Sheep's (PDFDrive)Document18 pagesThe Columbine Massacre - Barack Obama - Zionist Wolf in Sheep's (PDFDrive)Roman TilahunPas encore d'évaluation
- Applied Acoustics: Jens Forssén, Alice Ho Ffmann, Wolfgang KroppDocument9 pagesApplied Acoustics: Jens Forssén, Alice Ho Ffmann, Wolfgang KroppLuis Jorge Herrera FernandezPas encore d'évaluation
- A Live Performance System in Pure Data: Pitch Contour As Figurative GestureDocument10 pagesA Live Performance System in Pure Data: Pitch Contour As Figurative Gesturerickygraham2009100% (1)
- Efficient and Accurate Sound Propagation Using Adaptive Rectangular DecompositionDocument13 pagesEfficient and Accurate Sound Propagation Using Adaptive Rectangular DecompositionruphashriPas encore d'évaluation
- 46 Silence PDFDocument8 pages46 Silence PDFBùi Quang ChấtPas encore d'évaluation
- Keller Et Al2010 ICMCDocument8 pagesKeller Et Al2010 ICMCmusicoyargentinoPas encore d'évaluation
- Numerical Computation of The Sound Radiation FromDocument22 pagesNumerical Computation of The Sound Radiation FromNURI ONUR CATAKPas encore d'évaluation
- Physically Based Audio Rendering of ContactDocument4 pagesPhysically Based Audio Rendering of Contacty zPas encore d'évaluation
- AcousticsDocument131 pagesAcousticsSudhir SwarnkarPas encore d'évaluation
- Trombone Synthesis by Model and MeasurementDocument14 pagesTrombone Synthesis by Model and MeasurementMarcSanchisMartínezPas encore d'évaluation
- Acoustics The Science of SoundDocument132 pagesAcoustics The Science of SoundDelaniaD100% (4)
- Scrubber An Interface For Friction Induced SoundsDocument6 pagesScrubber An Interface For Friction Induced Soundsy zPas encore d'évaluation
- Audio Segment HeuristicDocument10 pagesAudio Segment HeuristicSuresh KumarPas encore d'évaluation
- Suppression of Acoustic Noise in Speech ProcessingDocument8 pagesSuppression of Acoustic Noise in Speech ProcessingprakashPas encore d'évaluation
- Digital Sound Synthesis by Physical ModellingDocument12 pagesDigital Sound Synthesis by Physical ModellingBrandy ThomasPas encore d'évaluation
- Trumpet Performance1Document15 pagesTrumpet Performance1api-477941527Pas encore d'évaluation
- The Soundwalk As An Operational Component For Urban Design, Venot and SemidorDocument6 pagesThe Soundwalk As An Operational Component For Urban Design, Venot and SemidorlindaokeeffePas encore d'évaluation
- IMAC XXV s44p02 Review Vibro Acoustics Analysis Procedures Prediction Low Frequency NoiseDocument19 pagesIMAC XXV s44p02 Review Vibro Acoustics Analysis Procedures Prediction Low Frequency Noised_u_i_l_i_oPas encore d'évaluation
- Spatial Composition Techniques and Sound Spatialisation TechnologiesDocument11 pagesSpatial Composition Techniques and Sound Spatialisation Technologiesoswald1974100% (1)
- A Comparison of Single-Reed and Bowed-String Excitations of A Hybrid Wind InstrumentDocument7 pagesA Comparison of Single-Reed and Bowed-String Excitations of A Hybrid Wind InstrumentRaiatea MoeataPas encore d'évaluation
- Content-Based Classification of Musical Instrument Timbres: Agostini Longari PollastriDocument8 pagesContent-Based Classification of Musical Instrument Timbres: Agostini Longari Pollastrihrishi30Pas encore d'évaluation
- Sonification of GesturesDocument17 pagesSonification of GesturesAndreas AlmqvistPas encore d'évaluation
- The Mathematics of Mixing: AES Member AES FellowDocument10 pagesThe Mathematics of Mixing: AES Member AES FellowNathalia Parra GarzaPas encore d'évaluation
- Sonification of GesturesDocument18 pagesSonification of GesturesAndreas AlmqvistPas encore d'évaluation
- Exploring Phase Information in Sound Source SeparaDocument9 pagesExploring Phase Information in Sound Source SeparaPaulo FeijãoPas encore d'évaluation
- Acoustics: The Science of SoundDocument131 pagesAcoustics: The Science of SoundNikhil VermaPas encore d'évaluation
- Measurement and Evaluation of Sound Intensity at The Medan Railway Station Using A Sound Level MeterDocument10 pagesMeasurement and Evaluation of Sound Intensity at The Medan Railway Station Using A Sound Level MeterMUHAMMAD ZAIYAN BIN MOHAMAD ZAMRIPas encore d'évaluation
- The Acoustic Doppler Effect Applied To The Study of Linear MotionsDocument12 pagesThe Acoustic Doppler Effect Applied To The Study of Linear MotionsSains Sekolah RendahPas encore d'évaluation
- Sound Synthesis TheoryDocument31 pagesSound Synthesis TheoryDavid Wolfswinkel100% (2)
- Sti Measurement of An Emergency P.A. System.: Santiago Iturburu, Lucas Fernandez Garabenta, Pedro VeneziaDocument18 pagesSti Measurement of An Emergency P.A. System.: Santiago Iturburu, Lucas Fernandez Garabenta, Pedro Veneziaiturburu48593Pas encore d'évaluation
- Mechanics of Flow-Induced Sound and Vibration, Volume 1: General Concepts and Elementary SourcesD'EverandMechanics of Flow-Induced Sound and Vibration, Volume 1: General Concepts and Elementary SourcesPas encore d'évaluation
- Discrete Fourier Transform: 2.1 DefinitionsDocument37 pagesDiscrete Fourier Transform: 2.1 DefinitionsgfhjdfPas encore d'évaluation
- Barros v2 n2 PDFDocument1 pageBarros v2 n2 PDFgfhjdfPas encore d'évaluation
- Choi ResumeDocument3 pagesChoi ResumegfhjdfPas encore d'évaluation
- DIC Swatch ReadMe PDFDocument23 pagesDIC Swatch ReadMe PDFeduarx100prePas encore d'évaluation
- AlgoCompNRTS - Week 1 Lecture NotesDocument16 pagesAlgoCompNRTS - Week 1 Lecture NotesgfhjdfPas encore d'évaluation
- MA 1506 Mathematics II Tutorial 11: Partial Differential EquationsDocument14 pagesMA 1506 Mathematics II Tutorial 11: Partial Differential EquationsgfhjdfPas encore d'évaluation
- Faust Den Haag April 2006 v6Document53 pagesFaust Den Haag April 2006 v6gfhjdfPas encore d'évaluation
- Assignment 3Document3 pagesAssignment 3gfhjdfPas encore d'évaluation
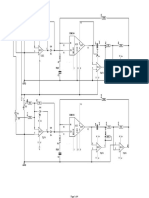
- Benjolinschematic 164Document4 pagesBenjolinschematic 164gfhjdfPas encore d'évaluation
- Lac Paper 2017Document3 pagesLac Paper 2017gfhjdfPas encore d'évaluation
- Technical IntroductionDocument21 pagesTechnical IntroductionAlexander KunPas encore d'évaluation
- LabsDocument2 pagesLabsgfhjdfPas encore d'évaluation
- Overlap Space CoordDocument1 pageOverlap Space CoordgfhjdfPas encore d'évaluation
- IS71014B Workshops in Creative Coding 1 (2016-17) : Genetic SculptorDocument2 pagesIS71014B Workshops in Creative Coding 1 (2016-17) : Genetic SculptorgfhjdfPas encore d'évaluation
- Reading and Writing Image FilesDocument40 pagesReading and Writing Image FilesgfhjdfPas encore d'évaluation
- Feature Detection - OpenCV 2.4.13.2 DocumentationDocument14 pagesFeature Detection - OpenCV 2.4.13.2 DocumentationgfhjdfPas encore d'évaluation
- IS71014B Workshops in Creative Coding 1 (2016-17) : Genetic Photobooth ModificationDocument2 pagesIS71014B Workshops in Creative Coding 1 (2016-17) : Genetic Photobooth ModificationgfhjdfPas encore d'évaluation
- Writing Externals For MaxDocument4 pagesWriting Externals For MaxgfhjdfPas encore d'évaluation
- Feature Detection - OpenCV 2.4.13.2 DocumentationDocument14 pagesFeature Detection - OpenCV 2.4.13.2 DocumentationgfhjdfPas encore d'évaluation
- Cept Rum Explained From PP TDocument4 pagesCept Rum Explained From PP TgfhjdfPas encore d'évaluation
- Benjolinschematic 164Document4 pagesBenjolinschematic 164gfhjdfPas encore d'évaluation
- AI Lecture Nortes: Tim Blackwell October 24, 2016Document27 pagesAI Lecture Nortes: Tim Blackwell October 24, 2016gfhjdfPas encore d'évaluation
- Cfdvhd4l Left Hand Solos Book 1 Classical ThemeDocument4 pagesCfdvhd4l Left Hand Solos Book 1 Classical Themegfhjdf0% (1)
- ErrataDocument3 pagesErratagfhjdfPas encore d'évaluation
- Chap Ra Errata First PrintingDocument3 pagesChap Ra Errata First PrintingVishalSelvanPas encore d'évaluation
- Interfacing Pure Data With FaustDocument8 pagesInterfacing Pure Data With FaustVincenzoRicciardelliPas encore d'évaluation
- Dubai Municipality RequirementsDocument1 pageDubai Municipality RequirementsmaheshbandhamPas encore d'évaluation
- Loctite Instant Adhesives: Instant Solutions in Every DropDocument9 pagesLoctite Instant Adhesives: Instant Solutions in Every DroptejassidhpuraPas encore d'évaluation
- Ariston Shape 10l Also Elhelyezesu Villanybojler Robbantott AbraDocument4 pagesAriston Shape 10l Also Elhelyezesu Villanybojler Robbantott AbraSinkó AttilaPas encore d'évaluation
- Ref Qty Part # Part Description UsageDocument2 pagesRef Qty Part # Part Description UsageJusaNadaPas encore d'évaluation
- Duropal Worktop Collection UK & Ireland 2021-2024Document19 pagesDuropal Worktop Collection UK & Ireland 2021-2024VivanPas encore d'évaluation
- Design of Seismic Force On BuildingDocument12 pagesDesign of Seismic Force On BuildingAjay DalviPas encore d'évaluation
- Boss Ve-20 ManualDocument144 pagesBoss Ve-20 ManualCarlo Mauricio González Parra100% (1)
- IP OP DevicesDocument9 pagesIP OP DevicesMalik Ali BiadPas encore d'évaluation
- Resistivity LoggimnhDocument12 pagesResistivity LoggimnhMaqsood IqbalPas encore d'évaluation
- 3M Festool Catalog - 60-4402-7925-9Document25 pages3M Festool Catalog - 60-4402-7925-9Kaled VásquezPas encore d'évaluation
- Difference Between PPM and PPMVDocument2 pagesDifference Between PPM and PPMVKhanh TrangPas encore d'évaluation
- TumblrDocument1 pageTumblrLumi ErePas encore d'évaluation
- Manual ZyXEL P-660R-T1 v3.40.Pdf1Document302 pagesManual ZyXEL P-660R-T1 v3.40.Pdf1Juan Sampertegui MoralesPas encore d'évaluation
- 2N Lift1: Brief ManualDocument12 pages2N Lift1: Brief ManualMartijnMartensPas encore d'évaluation
- Tech Musings: Don Lancaster'sDocument6 pagesTech Musings: Don Lancaster'sngaltunokPas encore d'évaluation
- Reuse of Textile e Uent Treatment Plant Sludge in Building MaterialsDocument7 pagesReuse of Textile e Uent Treatment Plant Sludge in Building MaterialsPriya PinkyPas encore d'évaluation
- ROS Installation Guide: RequirementsDocument2 pagesROS Installation Guide: RequirementsLiz QuartzPas encore d'évaluation
- Unix Important QuestionsDocument3 pagesUnix Important QuestionsNeo DragonPas encore d'évaluation
- RBC NiceDocument56 pagesRBC NiceTIOCA01Pas encore d'évaluation
- Work With Linked ServersDocument44 pagesWork With Linked ServersioiPas encore d'évaluation
- PasarDocument4 pagesPasarGonzalo vargasPas encore d'évaluation
- EIA/TIA 568A Wiring Standard EIA/TIA 568B Wiring StandardDocument3 pagesEIA/TIA 568A Wiring Standard EIA/TIA 568B Wiring Standardavnish100Pas encore d'évaluation
- Waste TreatmentDocument8 pagesWaste TreatmentJournalNX - a Multidisciplinary Peer Reviewed JournalPas encore d'évaluation
- Non-Concurrent Space ForcesDocument2 pagesNon-Concurrent Space ForcesJessica De GuzmanPas encore d'évaluation
- Ips e PR 850 PDFDocument73 pagesIps e PR 850 PDFdeyanshu7Pas encore d'évaluation
- Frappe Framework DocumentationDocument150 pagesFrappe Framework DocumentationTom Ssemwogerere100% (2)
- Mujahadeen AR-15Document13 pagesMujahadeen AR-15Chris Leahy100% (2)
- A New Approach To Completing A Previously Drilled Subsea WellDocument8 pagesA New Approach To Completing A Previously Drilled Subsea WellmnoriegalPas encore d'évaluation
- Project EngineerDocument3 pagesProject EngineerMuhammad NadeemPas encore d'évaluation