Vous aimerez peut-être aussi
- Wideband RF Technologies and Antennas in Microwave FrequenciesD'EverandWideband RF Technologies and Antennas in Microwave FrequenciesPas encore d'évaluation
- AVR Catalouge New PDFDocument9 pagesAVR Catalouge New PDFHamed BourshagaPas encore d'évaluation
- Millimicrosecond Pulse Techniques: International Series of Monographs on Electronics and InstrumentationD'EverandMillimicrosecond Pulse Techniques: International Series of Monographs on Electronics and InstrumentationPas encore d'évaluation
- AVR100 SeriesDocument11 pagesAVR100 SeriesAshrafPas encore d'évaluation
- VHF For The Radio Amateur Frank JonesDocument212 pagesVHF For The Radio Amateur Frank JonesRenato SpenglerPas encore d'évaluation
- Warring - Integrated Circuits How To Make Them WorkDocument71 pagesWarring - Integrated Circuits How To Make Them WorkEnya Andrea Ribba Hernandez67% (3)
- Single Phase Automatic Voltage Regulator DesignDocument9 pagesSingle Phase Automatic Voltage Regulator DesignPeter JordanPas encore d'évaluation
- RegulatorDocument9 pagesRegulatorAni SuherianiPas encore d'évaluation
- Regulador de Voltaje KCR 360Document40 pagesRegulador de Voltaje KCR 360Clever Negrete NovaPas encore d'évaluation
- OSCILLATORSDocument8 pagesOSCILLATORSapi-26100966100% (2)
- 250 To 5000 Watts PWM DCAC 220V Power InverterDocument9 pages250 To 5000 Watts PWM DCAC 220V Power InverterRommel RosillonPas encore d'évaluation
- SC 2007-12 DecDocument116 pagesSC 2007-12 DecJimy HendrixPas encore d'évaluation
- Dm44 Rev TextDocument170 pagesDm44 Rev TextChris56000100% (1)
- Avr GeDocument27 pagesAvr GeLucho_del_PeruPas encore d'évaluation
- Voltage Controlled Ring OscillatorDocument4 pagesVoltage Controlled Ring OscillatorNurulMaisaraAwangPas encore d'évaluation
- Rangkaian RangkaianDocument30 pagesRangkaian RangkaianAhmad JuheriPas encore d'évaluation
- ESR Tester 096kDocument41 pagesESR Tester 096kFabrício AngienePas encore d'évaluation
- Toroids For The Terrified PDFDocument7 pagesToroids For The Terrified PDFJonathan ReaPas encore d'évaluation
- (RFD9910) Common Base Amplifier Linearization Using AugmentationDocument3 pages(RFD9910) Common Base Amplifier Linearization Using AugmentationAnwar ZainuddinPas encore d'évaluation
- Automatic Voltage Regulator in GensetDocument8 pagesAutomatic Voltage Regulator in GensetPravat Kumar BeheraPas encore d'évaluation
- Transformerless Power SupplyDocument3 pagesTransformerless Power Supply27051977Pas encore d'évaluation
- AC Current Monitor by LM358Document14 pagesAC Current Monitor by LM358wlen2012Pas encore d'évaluation
- Hunting Noise SourcesDocument16 pagesHunting Noise Sourceslokesh222Pas encore d'évaluation
- Astable MultivibratorDocument146 pagesAstable Multivibratorsantovaron123Pas encore d'évaluation
- How To Use Your Cobra 29 WX NW STDocument24 pagesHow To Use Your Cobra 29 WX NW STbellscbPas encore d'évaluation
- Electronics Lab IIDocument3 pagesElectronics Lab IIVikram RaoPas encore d'évaluation
- Preamp and Tone Control Circuit With TDA1524ADocument4 pagesPreamp and Tone Control Circuit With TDA1524A_download_only_Pas encore d'évaluation
- Design Issues in CMOS OscillatorsDocument4 pagesDesign Issues in CMOS OscillatorsdhrubPas encore d'évaluation
- Capacitance and Inductance Measurements Using An Oscilloscope and A Function GeneratorDocument9 pagesCapacitance and Inductance Measurements Using An Oscilloscope and A Function Generatoralex castroPas encore d'évaluation
- RCA WR-50B Signal Generator Instruction ManualDocument44 pagesRCA WR-50B Signal Generator Instruction ManualReed JonathanPas encore d'évaluation
- Building A Homebrew HF Receiver: The Vanishing ArtDocument40 pagesBuilding A Homebrew HF Receiver: The Vanishing ArtGHz VcoasmPas encore d'évaluation
- Basler Elect Excitation System Upgrade Frame6UG09Document53 pagesBasler Elect Excitation System Upgrade Frame6UG09Ksureshki SureshPas encore d'évaluation
- Computation of Transformer Losses Under The Effects of Non-Sinusoidal CurrentsDocument14 pagesComputation of Transformer Losses Under The Effects of Non-Sinusoidal CurrentsAnonymous IlrQK9HuPas encore d'évaluation
- RA60H1317M RF Power MOSFET Amplifier Module DatasheetDocument9 pagesRA60H1317M RF Power MOSFET Amplifier Module DatasheetAbbas MaghazehiPas encore d'évaluation
- Bias For Integrated CircuitsDocument10 pagesBias For Integrated CircuitsNaveen KumarPas encore d'évaluation
- LTspice 4 E2Document155 pagesLTspice 4 E2Ruud van TarunPas encore d'évaluation
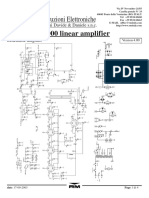
- Costruzioni Elettroniche: Mod. KLV 1000 Linear AmplifierDocument4 pagesCostruzioni Elettroniche: Mod. KLV 1000 Linear AmplifierPisu Miau Pisu Miau100% (2)
- Elliott Sound Products - Linear Power Supply DesignDocument26 pagesElliott Sound Products - Linear Power Supply Designksb9790Pas encore d'évaluation
- PC2193 Basic Electronics Introduction To The OscilloscopeDocument7 pagesPC2193 Basic Electronics Introduction To The OscilloscopeddyzleePas encore d'évaluation
- Capacitance and Inductance Measurements Using An Oscilloscope PDFDocument10 pagesCapacitance and Inductance Measurements Using An Oscilloscope PDFfernandofsvPas encore d'évaluation
- 1 Electrical - and - Electronics - Measurment. McGraw Hill, 2013-413-651Document239 pages1 Electrical - and - Electronics - Measurment. McGraw Hill, 2013-413-651Andrea Acuña100% (1)
- Blocking Oscillator: Resistor Transformer Transistor Duty-Cycle Leds Red-Eye EffectDocument5 pagesBlocking Oscillator: Resistor Transformer Transistor Duty-Cycle Leds Red-Eye EffectArul RajPas encore d'évaluation
- Aa3Rl - Transmission Line Calculator: Input Data: Output DataDocument5 pagesAa3Rl - Transmission Line Calculator: Input Data: Output DataNd ReyesPas encore d'évaluation
- Tektronix OscilloscopesDocument30 pagesTektronix OscilloscopesBrad JestinPas encore d'évaluation
- TS 830S Service High ResolutionDocument71 pagesTS 830S Service High ResolutionrjtyreePas encore d'évaluation
- Constant Current SourceDocument5 pagesConstant Current SourceAnonymous TPVfFif6TOPas encore d'évaluation
- Colpitt Oscillator PDFDocument2 pagesColpitt Oscillator PDFScottPas encore d'évaluation
- 148 AlignmentDocument7 pages148 AlignmentEric PskdPas encore d'évaluation
- Small High Efficiency Loop AntennasDocument5 pagesSmall High Efficiency Loop Antennaswhynot05Pas encore d'évaluation
- Antique Transformer and Parts Catalogs and SpecificationsDocument5 pagesAntique Transformer and Parts Catalogs and Specificationskimbalsummers801Pas encore d'évaluation
- Analog Circuits-II Answer KeyDocument30 pagesAnalog Circuits-II Answer KeyreneeshczPas encore d'évaluation
- 14 20B10PDocument43 pages14 20B10PJimmy Fonseca GarbanzoPas encore d'évaluation
- Forward Design 300W STmicroelectronics App NoteDocument10 pagesForward Design 300W STmicroelectronics App Notecristi7521Pas encore d'évaluation
- Experiment 2 - Iduction Motor Drive Using Slip Power RecoveryDocument6 pagesExperiment 2 - Iduction Motor Drive Using Slip Power RecoveryDeepak BansalPas encore d'évaluation
- UC3845 Technical ExplanationDocument15 pagesUC3845 Technical ExplanationankurmalviyaPas encore d'évaluation
- Variable Frequency Drive: Abstract-The DC To AC Converters Is Known AsDocument4 pagesVariable Frequency Drive: Abstract-The DC To AC Converters Is Known AsDiego AragónPas encore d'évaluation
- UC3842 Inside SchematicsDocument17 pagesUC3842 Inside Schematicsp.c100% (1)
- UC3842 DesignDocument7 pagesUC3842 DesignCui BapPas encore d'évaluation
- AppNote03 Uc3842Document14 pagesAppNote03 Uc3842Heriberto Flores AmpiePas encore d'évaluation
- Aplicacion Uc3842Document15 pagesAplicacion Uc3842Gian Mejia100% (1)
- BMD101 PDFDocument14 pagesBMD101 PDFrajPas encore d'évaluation
- 7SJ45 Application NoteDocument18 pages7SJ45 Application NoteSathish KumarPas encore d'évaluation
- Celem TXDocument2 pagesCelem TXAshok PatelPas encore d'évaluation
- One ShotDocument14 pagesOne ShotDiego LeivaPas encore d'évaluation
- DatasheetDocument4 pagesDatasheetselocaPas encore d'évaluation
- 6 BJT Basic PropertiesDocument67 pages6 BJT Basic PropertiesRaheetha AhmedPas encore d'évaluation
- Welded Mesh SpecificationDocument4 pagesWelded Mesh Specificationsunil050776Pas encore d'évaluation
- System Sensor PC2W-P Data SheetDocument4 pagesSystem Sensor PC2W-P Data SheetJMAC SupplyPas encore d'évaluation
- Photodegradation of Perovskite Solar CellsDocument10 pagesPhotodegradation of Perovskite Solar Cellsamjad FarooqPas encore d'évaluation
- TN HTB Spherical LensesDocument5 pagesTN HTB Spherical LensesHitesh KashyapPas encore d'évaluation
- HCPL-3150 (Single Channel), HCPL-315J (Dual Channel) : Data SheetDocument27 pagesHCPL-3150 (Single Channel), HCPL-315J (Dual Channel) : Data SheethaPas encore d'évaluation
- IGCSE Physics Summary of Chapters 18-19Document12 pagesIGCSE Physics Summary of Chapters 18-19Anya UwƠPas encore d'évaluation
- Diagram AsDocument7 pagesDiagram AsAracely Saraos100% (2)
- Surge Current Protection Using SuperconductorDocument25 pagesSurge Current Protection Using SuperconductorAbhishek Walter PaulPas encore d'évaluation
- V-F / F-V Convertor: General Description Package OutlineDocument15 pagesV-F / F-V Convertor: General Description Package Outlinejjtrivedi8717Pas encore d'évaluation
- 400W Rms Hexfet Mosfet Symmetrical AmplifierDocument10 pages400W Rms Hexfet Mosfet Symmetrical Amplifieralbedo367Pas encore d'évaluation
- Tda 2005Document21 pagesTda 2005Vamsi Mani Deep ElapakurtyPas encore d'évaluation
- Power Electronics Media Tensión PDFDocument88 pagesPower Electronics Media Tensión PDFPato LlumiPas encore d'évaluation
- Microelectronics Reliability: Yong LiuDocument8 pagesMicroelectronics Reliability: Yong Liu李云龙Pas encore d'évaluation
- Chandigarh University, Gharuan Assingment-02 (UNIT-II) Applied Physics (APT-111)Document1 pageChandigarh University, Gharuan Assingment-02 (UNIT-II) Applied Physics (APT-111)Priyanka SharmaPas encore d'évaluation
- Nanowires and NanorodsDocument9 pagesNanowires and Nanorodsprakush_prakushPas encore d'évaluation
- Advances in Diverse Industrial Applications of Nano CompositesDocument588 pagesAdvances in Diverse Industrial Applications of Nano CompositesJosé RamírezPas encore d'évaluation
- Riparazione EcmDocument17 pagesRiparazione Ecmjalvarez_385073Pas encore d'évaluation
- Problems (Electronics)Document3 pagesProblems (Electronics)AndoryuuBanRaian100% (1)
- Design of 8051 Microcontroller: Behavioral Modeling of ALU and Decoder For 8051 MicrocontrollerDocument23 pagesDesign of 8051 Microcontroller: Behavioral Modeling of ALU and Decoder For 8051 Microcontrollerjaved1067Pas encore d'évaluation
- Final Year Project Report Writing GuidelinesV5.0Document8 pagesFinal Year Project Report Writing GuidelinesV5.0Ridzuan RahmanPas encore d'évaluation
- Ruuvitag Revb6 SchematicDocument1 pageRuuvitag Revb6 SchematicJimmy HunterPas encore d'évaluation
- PM-6005 Service ManualDocument54 pagesPM-6005 Service ManualKarmelo Elorrieta67% (3)
- Ce CB CC ConfigurationDocument4 pagesCe CB CC ConfigurationKrishna GhimirePas encore d'évaluation
- Sed 1565Document87 pagesSed 1565martinch buggsyPas encore d'évaluation
- The Journeyman Electrician Exam Study Guide: Proven Methods for Successfully Passing the Journeyman Electrician Exam with ConfidenceD'EverandThe Journeyman Electrician Exam Study Guide: Proven Methods for Successfully Passing the Journeyman Electrician Exam with ConfidencePas encore d'évaluation
- Multiplexed Networks for Embedded Systems: CAN, LIN, FlexRay, Safe-by-Wire...D'EverandMultiplexed Networks for Embedded Systems: CAN, LIN, FlexRay, Safe-by-Wire...Pas encore d'évaluation
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionD'EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionÉvaluation : 4.5 sur 5 étoiles4.5/5 (543)
- Electrical Engineering 101: Everything You Should Have Learned in School...but Probably Didn'tD'EverandElectrical Engineering 101: Everything You Should Have Learned in School...but Probably Didn'tÉvaluation : 4.5 sur 5 étoiles4.5/5 (27)
- Power System Control and ProtectionD'EverandPower System Control and ProtectionB. Don RussellÉvaluation : 4 sur 5 étoiles4/5 (11)
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionD'EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionÉvaluation : 4 sur 5 étoiles4/5 (331)
- Conquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeD'EverandConquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeÉvaluation : 4.5 sur 5 étoiles4.5/5 (10)
- A Mind at Play: How Claude Shannon Invented the Information AgeD'EverandA Mind at Play: How Claude Shannon Invented the Information AgeÉvaluation : 4 sur 5 étoiles4/5 (53)
- INCOSE Systems Engineering Handbook: A Guide for System Life Cycle Processes and ActivitiesD'EverandINCOSE Systems Engineering Handbook: A Guide for System Life Cycle Processes and ActivitiesÉvaluation : 5 sur 5 étoiles5/5 (1)
- 2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersD'Everand2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersÉvaluation : 5 sur 5 étoiles5/5 (1)
- Guide to the IET Wiring Regulations: IET Wiring Regulations (BS 7671:2008 incorporating Amendment No 1:2011)D'EverandGuide to the IET Wiring Regulations: IET Wiring Regulations (BS 7671:2008 incorporating Amendment No 1:2011)Évaluation : 4 sur 5 étoiles4/5 (2)
- Practical Electrical Wiring: Residential, Farm, Commercial, and IndustrialD'EverandPractical Electrical Wiring: Residential, Farm, Commercial, and IndustrialÉvaluation : 3.5 sur 5 étoiles3.5/5 (3)
- Retro Gaming with Raspberry Pi: Nearly 200 Pages of Video Game ProjectsD'EverandRetro Gaming with Raspberry Pi: Nearly 200 Pages of Video Game ProjectsPas encore d'évaluation
- Programming the Raspberry Pi, Third Edition: Getting Started with PythonD'EverandProgramming the Raspberry Pi, Third Edition: Getting Started with PythonÉvaluation : 5 sur 5 étoiles5/5 (2)
- Empires of Light: Edison, Tesla, Westinghouse, and the Race to Electrify the WorldD'EverandEmpires of Light: Edison, Tesla, Westinghouse, and the Race to Electrify the WorldÉvaluation : 4 sur 5 étoiles4/5 (87)
- Open Radio Access Network (O-RAN) Systems Architecture and DesignD'EverandOpen Radio Access Network (O-RAN) Systems Architecture and DesignPas encore d'évaluation
- Hacking Electronics: An Illustrated DIY Guide for Makers and HobbyistsD'EverandHacking Electronics: An Illustrated DIY Guide for Makers and HobbyistsÉvaluation : 3.5 sur 5 étoiles3.5/5 (2)
- DIY Drones for the Evil Genius: Design, Build, and Customize Your Own DronesD'EverandDIY Drones for the Evil Genius: Design, Build, and Customize Your Own DronesÉvaluation : 3.5 sur 5 étoiles3.5/5 (3)
- Digital Transformation: Survive and Thrive in an Era of Mass ExtinctionD'EverandDigital Transformation: Survive and Thrive in an Era of Mass ExtinctionÉvaluation : 4.5 sur 5 étoiles4.5/5 (9)
- C++ Programming Language: Simple, Short, and Straightforward Way of Learning C++ ProgrammingD'EverandC++ Programming Language: Simple, Short, and Straightforward Way of Learning C++ ProgrammingÉvaluation : 4 sur 5 étoiles4/5 (1)