Vous aimerez peut-être aussi
- Calculo de Ampacidad - Elard GutierrezDocument1 pageCalculo de Ampacidad - Elard Gutierrezelarcito007Pas encore d'évaluation
- Distribucion ElectricaDocument1 pageDistribucion Electricaelarcito007Pas encore d'évaluation
- Arbol Ce EfectosDocument1 pageArbol Ce Efectoselarcito007Pas encore d'évaluation
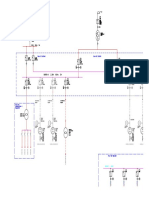
- Flujo de Potencia PLANTADocument1 pageFlujo de Potencia PLANTAelarcito007Pas encore d'évaluation
- REM610 Tech 755927 ESaDocument148 pagesREM610 Tech 755927 ESaelarcito007Pas encore d'évaluation
- Ubicacion Cerco Alto Jesus PDFDocument1 pageUbicacion Cerco Alto Jesus PDFelarcito007Pas encore d'évaluation
- Anexo 1 PP AUTOTRANSFORMADOR DE POTENCIA SE PUNO PDFDocument10 pagesAnexo 1 PP AUTOTRANSFORMADOR DE POTENCIA SE PUNO PDFelarcito007Pas encore d'évaluation
- Modelo Cuadro de CargasDocument1 pageModelo Cuadro de CargasJulio CescPas encore d'évaluation
- CARTA de Compromiso de Ing - ElardDocument1 pageCARTA de Compromiso de Ing - Elardelarcito007Pas encore d'évaluation
- Aislamiento y Apantallamiento de Una Subestacion - DesbloqueadoDocument144 pagesAislamiento y Apantallamiento de Una Subestacion - DesbloqueadoHenry CallePas encore d'évaluation
- Expediente Ingenieria La EnlozadaDocument57 pagesExpediente Ingenieria La Enlozadaelarcito007Pas encore d'évaluation
- XXX2Document1 pageXXX2elarcito007Pas encore d'évaluation
- Informe Resistividad de Terreno Linea 4Document7 pagesInforme Resistividad de Terreno Linea 4elarcito007Pas encore d'évaluation
- Armados Lozada-Model PDFDocument1 pageArmados Lozada-Model PDFelarcito007Pas encore d'évaluation
- Articulo - Coordinacion de AislamientoDocument8 pagesArticulo - Coordinacion de Aislamientoelarcito007Pas encore d'évaluation
- Distancias Miniimas de Seguridad en SEDocument10 pagesDistancias Miniimas de Seguridad en SEelarcito007Pas encore d'évaluation
- Fuera de ServicioDocument1 pageFuera de Servicioelarcito007Pas encore d'évaluation
- Armados Lozada-ModelDocument1 pageArmados Lozada-Modelelarcito007Pas encore d'évaluation
- 1 Propiedades Magneticas de La MateriaDocument11 pages1 Propiedades Magneticas de La Materiaelarcito007Pas encore d'évaluation
- Calculo de Mallas de TierrasDocument9 pagesCalculo de Mallas de TierrasEduardo De Jesús Sánchez MagañaPas encore d'évaluation
- Bibliografia en Normas Ieee PDFDocument7 pagesBibliografia en Normas Ieee PDFPablo PamplonaPas encore d'évaluation
- Teoria 10 - Instacion de Pararrayos-En Lineas 2014Document20 pagesTeoria 10 - Instacion de Pararrayos-En Lineas 2014elarcito007Pas encore d'évaluation
- Introducciony Aplicacionedde PSCADDocument127 pagesIntroducciony Aplicacionedde PSCADelarcito007100% (1)
- Mantenimiento de InterruptoresDocument80 pagesMantenimiento de Interruptoreselarcito007100% (6)
- Seleccion Aislamiento Lineas Transmision EnergiaDocument9 pagesSeleccion Aislamiento Lineas Transmision EnergiaremybonjaskyPas encore d'évaluation
- Luminarias y Lamparas LED 2013 - PhilipsDocument36 pagesLuminarias y Lamparas LED 2013 - PhilipsDiego RodriguezPas encore d'évaluation
- Teoria 09 - Esudio Estadistico 2014Document40 pagesTeoria 09 - Esudio Estadistico 2014elarcito007Pas encore d'évaluation
- Calidad de Energia ElectricaDocument86 pagesCalidad de Energia Electricaelarcito007Pas encore d'évaluation
- Teatro & ESI - Cuadernillo N°3Document41 pagesTeatro & ESI - Cuadernillo N°3Rosa ZalazarPas encore d'évaluation
- Analisis de Regresion y Correlacion LinealDocument3 pagesAnalisis de Regresion y Correlacion LinealVictor DVPas encore d'évaluation
- Ciencias 7Document252 pagesCiencias 7Luis MendozaPas encore d'évaluation
- 20 SeñalizaciónDocument12 pages20 SeñalizaciónCarlos CotoPas encore d'évaluation
- Foro Tematico Calificlable F & QDocument3 pagesForo Tematico Calificlable F & QNick Arthur Sebastian CarrascalPas encore d'évaluation
- Sociologia - Resumen Parcial 1Document14 pagesSociologia - Resumen Parcial 1RodrigoPas encore d'évaluation
- Guia Tercer Parcial Mate Ii Prim 2017Document5 pagesGuia Tercer Parcial Mate Ii Prim 2017Victor MendozaPas encore d'évaluation
- Reporte de La Generación 5 de Las ComputadorasDocument12 pagesReporte de La Generación 5 de Las ComputadorasJoel MorenoPas encore d'évaluation
- Matriz de Riesgo ESCALONA 2022.Document7 pagesMatriz de Riesgo ESCALONA 2022.Bernardo MenesesPas encore d'évaluation
- Atencion Primaria de SaludDocument7 pagesAtencion Primaria de SaludGraciela Estrada PortocarreroPas encore d'évaluation
- Cuaderno de Notas Quimica AplicadaDocument50 pagesCuaderno de Notas Quimica AplicadamaryPas encore d'évaluation
- Clasificación Taxonómica y Especies de ArrozDocument28 pagesClasificación Taxonómica y Especies de ArrozMaria Espino100% (2)
- Examens PDFDocument230 pagesExamens PDFArantxafeba100% (2)
- Manual de Formación NavalDocument37 pagesManual de Formación NavalLjubomirAllanDrpićCormackPas encore d'évaluation
- Orden CerradoDocument44 pagesOrden CerradoOmar Alex Apaza MarcaPas encore d'évaluation
- Resistencia a la abrasión: Ensayo de Los ÁngelesDocument23 pagesResistencia a la abrasión: Ensayo de Los ÁngelesLeon Chavez JoselinPas encore d'évaluation
- Dilemas Actuales Del Derecho de La Familia.Document15 pagesDilemas Actuales Del Derecho de La Familia.MarthaOlgaPas encore d'évaluation
- Artucio Montevideo y La Arq ModernaDocument30 pagesArtucio Montevideo y La Arq ModernaOvidio SantosPas encore d'évaluation
- Ejercicio1 13 Arduino UltrasonicoDocument3 pagesEjercicio1 13 Arduino UltrasonicoGabrielPas encore d'évaluation
- Capa de Enlace de Datos y Capa Física: Funciones y Conceptos ClaveDocument5 pagesCapa de Enlace de Datos y Capa Física: Funciones y Conceptos ClaveAle MorenoPas encore d'évaluation
- EXPOSICIONDocument13 pagesEXPOSICIONZulma ZlmPas encore d'évaluation
- Cuestionario 2.1Document12 pagesCuestionario 2.1kevinPas encore d'évaluation
- Toxicidad metales guion informativoDocument3 pagesToxicidad metales guion informativoEybar Villamizar MoraPas encore d'évaluation
- Triptico Alimentos OrganicosDocument2 pagesTriptico Alimentos Organicosguadalupemariano495Pas encore d'évaluation
- Libro Consulta de Puericultura 20111Document77 pagesLibro Consulta de Puericultura 20111Luis Reynaga JimenezPas encore d'évaluation
- XCeed InsertDocument4 pagesXCeed InsertDiego VGPas encore d'évaluation
- Usos y Aplicaciones de AminasDocument8 pagesUsos y Aplicaciones de AminasIsa Berrones100% (1)
- Bus - Especificaciones k410 6x2 Low Driver - tcm80-257452Document2 pagesBus - Especificaciones k410 6x2 Low Driver - tcm80-257452Juan Diego Chinchay Rojas100% (2)
- Pitidiasis Rosada de GibertDocument6 pagesPitidiasis Rosada de GibertOdel JavierPas encore d'évaluation
- LoxoscelismoDocument10 pagesLoxoscelismoVG GabrielPas encore d'évaluation