Vous aimerez peut-être aussi
- This Work Is Supported in Part by The Sensip Center and The Consortium Award No. S0322Document5 pagesThis Work Is Supported in Part by The Sensip Center and The Consortium Award No. S0322Prabhakar ElePas encore d'évaluation
- Learning A Locality Preserving Subspace For Visual RecognitionDocument8 pagesLearning A Locality Preserving Subspace For Visual Recognitionprashanth30sgrPas encore d'évaluation
- Two-Dimensional Linear Discriminant Analysis: Jieping Ye Ravi Janardan Qi LiDocument8 pagesTwo-Dimensional Linear Discriminant Analysis: Jieping Ye Ravi Janardan Qi LiRizka FajariniPas encore d'évaluation
- Bit Matrix Index in Image RetievalDocument8 pagesBit Matrix Index in Image Retievalnidee_nishokPas encore d'évaluation
- Region Covariance: A Fast Descriptor For Detection and ClassificationDocument12 pagesRegion Covariance: A Fast Descriptor For Detection and ClassificationRashad NoureddinePas encore d'évaluation
- 00science Saul Nonlinear Dimensionality ReductionDocument4 pages00science Saul Nonlinear Dimensionality ReductionJeong-Yoon LeePas encore d'évaluation
- An Introduction To Locally Linear EmbeddingDocument13 pagesAn Introduction To Locally Linear EmbeddingJorge LeandroPas encore d'évaluation
- Betweeness PurDocument22 pagesBetweeness Purabdou skPas encore d'évaluation
- Robust Sparse Coding For Face RecognitionDocument8 pagesRobust Sparse Coding For Face RecognitioneabrahPas encore d'évaluation
- Sparse Concept Coding For Visual AnalysisDocument6 pagesSparse Concept Coding For Visual AnalysisgalaxystarPas encore d'évaluation
- Fast Low Rank Representation Based Spatial Pyramid Matching For Image ClassificationDocument22 pagesFast Low Rank Representation Based Spatial Pyramid Matching For Image ClassificationShahid KIPas encore d'évaluation
- Nonparametric Regression: Lowess/LoessDocument4 pagesNonparametric Regression: Lowess/LoessHofidisPas encore d'évaluation
- Two-Dimensional Laplacianfaces Method For Face RecognitionDocument7 pagesTwo-Dimensional Laplacianfaces Method For Face RecognitionKeerti Kumar KorlapatiPas encore d'évaluation
- Understanding Principal Component PDFDocument10 pagesUnderstanding Principal Component PDFFrancisco Jácome SarmentoPas encore d'évaluation
- The Double-Base Number System and Its Application To Elliptic Curve CryptographyDocument30 pagesThe Double-Base Number System and Its Application To Elliptic Curve CryptographyVinh CuongPas encore d'évaluation
- Primal Sketch: Integrating Structure and Texture ?: Cheng-En Guo, Song-Chun Zhu, and Ying Nian WuDocument26 pagesPrimal Sketch: Integrating Structure and Texture ?: Cheng-En Guo, Song-Chun Zhu, and Ying Nian WuGautam JhaPas encore d'évaluation
- Kernel Visual RecognitionDocument9 pagesKernel Visual RecognitionjuancarlospPas encore d'évaluation
- LEEBPDocument11 pagesLEEBPSuchi ReddyPas encore d'évaluation
- LaplacianDocument25 pagesLaplacianMatteo LionelloPas encore d'évaluation
- Spatial Feat EmbeddingDocument4 pagesSpatial Feat Embeddingmartin_321Pas encore d'évaluation
- Think Globally, Fit LocallyDocument33 pagesThink Globally, Fit LocallyAli Umair KhanPas encore d'évaluation
- An Introduction To Spatial Database SystemDocument30 pagesAn Introduction To Spatial Database SystemjerryPas encore d'évaluation
- Introduction of The Radial Basis Function (RBF) Networks: February 2001Document8 pagesIntroduction of The Radial Basis Function (RBF) Networks: February 2001jainam dudePas encore d'évaluation
- A New Face Recognition Method Using PCA, LDA and Neural NetworkDocument6 pagesA New Face Recognition Method Using PCA, LDA and Neural NetworkSujith KumarPas encore d'évaluation
- An Introduction To Spatial Database SystemDocument30 pagesAn Introduction To Spatial Database SystemsanggaraPas encore d'évaluation
- Topological Data Analysis PresentationDocument87 pagesTopological Data Analysis Presentationtriviachallenge99Pas encore d'évaluation
- 2 Description of T He Proposed SystemDocument10 pages2 Description of T He Proposed SystemGautham ShettyPas encore d'évaluation
- Paper Title: Author Name AffiliationDocument6 pagesPaper Title: Author Name AffiliationPritam PatilPas encore d'évaluation
- Searching For A Solution To The Automatic RBF Network Design ProblemDocument24 pagesSearching For A Solution To The Automatic RBF Network Design ProblemAnonymous Wu14iV9dqPas encore d'évaluation
- Topological Methods For The Analysis of High Dimensional Data Sets and 3D Object RecognitionDocument11 pagesTopological Methods For The Analysis of High Dimensional Data Sets and 3D Object RecognitionAminePas encore d'évaluation
- Constrained Compound MRF Model With Bi-Level Line Field For Color Image SegmentationDocument22 pagesConstrained Compound MRF Model With Bi-Level Line Field For Color Image SegmentationShanmugapriyaVinodkumarPas encore d'évaluation
- Feature Selection For Nonlinear Kernel Support Vector MachinesDocument6 pagesFeature Selection For Nonlinear Kernel Support Vector MachinesSelly Anastassia Amellia KharisPas encore d'évaluation
- Spatial Pyramid Matching For Scene Category RecognitionDocument6 pagesSpatial Pyramid Matching For Scene Category RecognitionVaibhav JainPas encore d'évaluation
- Estimation of Parameters of Lomax Distribution by Using Maximum Product Spacings MethodDocument9 pagesEstimation of Parameters of Lomax Distribution by Using Maximum Product Spacings MethodIJRASETPublicationsPas encore d'évaluation
- 18 022 PDFDocument33 pages18 022 PDFUma TamilPas encore d'évaluation
- Data Models Vector Data Model: Remote Sensing & Gis (18Cv651)Document12 pagesData Models Vector Data Model: Remote Sensing & Gis (18Cv651)Vinayaka DPas encore d'évaluation
- Presented By: Ercherio Marpaung (14S15056) Dewi Fortuna Simangunsong (14S15007)Document30 pagesPresented By: Ercherio Marpaung (14S15056) Dewi Fortuna Simangunsong (14S15007)Ercherio MarpaungPas encore d'évaluation
- Color Transfer Between ImagesDocument11 pagesColor Transfer Between ImagesArmanda DanielPas encore d'évaluation
- Zeng 2019Document4 pagesZeng 2019Sai SaiPas encore d'évaluation
- Stats306b Spring14 Lecture7 - ScribedDocument6 pagesStats306b Spring14 Lecture7 - ScribedasfdSFDSFGEPas encore d'évaluation
- Abs CCR Clustering and Collaborative RepresentationDocument2 pagesAbs CCR Clustering and Collaborative Representationg_31682896Pas encore d'évaluation
- Correlation Visualization of High Dimensional DataDocument7 pagesCorrelation Visualization of High Dimensional DataHaruna TofaPas encore d'évaluation
- A Distributed Linear Least Squares Method For Precise Localization With Low Complexity in Wireless Sensor NetworksDocument16 pagesA Distributed Linear Least Squares Method For Precise Localization With Low Complexity in Wireless Sensor NetworksMakhsyar Souvilly DinniPas encore d'évaluation
- Graph Regularized Non-Negative Matrix Factorization For Data RepresentationDocument14 pagesGraph Regularized Non-Negative Matrix Factorization For Data Representationavi_weberPas encore d'évaluation
- School of Biomedical Engineering, Southern Medical University, Guangzhou 510515, ChinaDocument4 pagesSchool of Biomedical Engineering, Southern Medical University, Guangzhou 510515, ChinaTosh JainPas encore d'évaluation
- Thesis Proposal: Graph Structured Statistical Inference: James SharpnackDocument20 pagesThesis Proposal: Graph Structured Statistical Inference: James SharpnackaliPas encore d'évaluation
- Aviris Hyperspectral Images Compression Using 3d Spiht AlgorithmDocument6 pagesAviris Hyperspectral Images Compression Using 3d Spiht AlgorithmIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalPas encore d'évaluation
- Pose EstimationDocument4 pagesPose Estimationnounou2132Pas encore d'évaluation
- SSC Cvpr09 EhsanDocument8 pagesSSC Cvpr09 EhsanGilbertPas encore d'évaluation
- Registration For Correlative Microscopy Using Image AnalogiesDocument10 pagesRegistration For Correlative Microscopy Using Image AnalogiesmarcniethammerPas encore d'évaluation
- Algorithms and Applications For Spatial Data Mining PDFDocument32 pagesAlgorithms and Applications For Spatial Data Mining PDFrbhramarPas encore d'évaluation
- A Combinatorial Interpretation of Double Base Number System and Some ConsequencesDocument15 pagesA Combinatorial Interpretation of Double Base Number System and Some ConsequencesBeru RazaPas encore d'évaluation
- Discriminative Decorrelation For Clustering and ClassificationDocument14 pagesDiscriminative Decorrelation For Clustering and ClassificationMohsen AnsariPas encore d'évaluation
- ActingDocument1 pageActingFadhil SahibPas encore d'évaluation
- Dense CRFDocument9 pagesDense CRFTiến QuảngPas encore d'évaluation
- Recognition of English Characters by Codes Generated Using Neighbour IdentificationDocument7 pagesRecognition of English Characters by Codes Generated Using Neighbour IdentificationEn VyPas encore d'évaluation
- A Discriminate Multidimensional Mapping For Small Sample DatabaseDocument9 pagesA Discriminate Multidimensional Mapping For Small Sample DatabaseSâm HoàngPas encore d'évaluation
- Bad GeometryDocument5 pagesBad GeometryMilica PopovicPas encore d'évaluation
- New Chaotic Binary Sequences With Good Correlation Property Using Logistic MapsDocument6 pagesNew Chaotic Binary Sequences With Good Correlation Property Using Logistic MapsInternational Organization of Scientific Research (IOSR)Pas encore d'évaluation
- Efficient Sparse Representation Classification Using Adaptive ClusteringDocument7 pagesEfficient Sparse Representation Classification Using Adaptive ClusteringShahid KIPas encore d'évaluation
- Module 12Document25 pagesModule 12Shahid KIPas encore d'évaluation
- Fast Low Rank Representation Based Spatial Pyramid Matching For Image ClassificationDocument22 pagesFast Low Rank Representation Based Spatial Pyramid Matching For Image ClassificationShahid KIPas encore d'évaluation
- CVPR16 Tutorial Subspace Clustering Scalable SSC ReneDocument34 pagesCVPR16 Tutorial Subspace Clustering Scalable SSC ReneShahid KIPas encore d'évaluation
- Machine LearningDocument15 pagesMachine LearningShahid KIPas encore d'évaluation
- EE380 (Control Systems) Lab Work of Experiment 5.: Student Name Roll No. Bench NoDocument2 pagesEE380 (Control Systems) Lab Work of Experiment 5.: Student Name Roll No. Bench NoShahid KIPas encore d'évaluation
- Assignment 3Document2 pagesAssignment 3Shahid KIPas encore d'évaluation
- Ee370 Ass2 Matlab CodeDocument1 pageEe370 Ass2 Matlab CodeShahid KIPas encore d'évaluation
- Lec 3 VerilogDocument36 pagesLec 3 VerilogShahid KIPas encore d'évaluation
- Adaptive Filter For Ecg Noise Reduction Using Rls Algorithm: Arshdeep Singh, Rajesh MehraDocument5 pagesAdaptive Filter For Ecg Noise Reduction Using Rls Algorithm: Arshdeep Singh, Rajesh MehraShahid KIPas encore d'évaluation
- Lec 03Document19 pagesLec 03akashsherPas encore d'évaluation
- EE321 - Assignment I: January 11, 2014Document1 pageEE321 - Assignment I: January 11, 2014Shahid KIPas encore d'évaluation
- Allamah Nu'Mani and Other Deobandis On Ibn Abd Al-Wahhab and His FollowersDocument11 pagesAllamah Nu'Mani and Other Deobandis On Ibn Abd Al-Wahhab and His FollowersShahid KI100% (1)
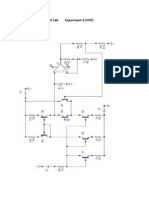
- EE381A: EC Lab Experiment-2 (VCO)Document2 pagesEE381A: EC Lab Experiment-2 (VCO)Shahid KIPas encore d'évaluation
- Ac PDFDocument1 pageAc PDFShahid KIPas encore d'évaluation
- 8085 InstructionsetDocument21 pages8085 InstructionsetAmarjeet OberoiPas encore d'évaluation
- Ballbeam EE380 Fall09 PDFDocument13 pagesBallbeam EE380 Fall09 PDFShahid KIPas encore d'évaluation
- Acknowledgement: Gawade S.R. Class Coordinator Prof. Shirke Sir, Principal Dr. Narve N.G. and All The StaffDocument16 pagesAcknowledgement: Gawade S.R. Class Coordinator Prof. Shirke Sir, Principal Dr. Narve N.G. and All The StaffShubham PhadtarePas encore d'évaluation
- Preparation For Speaking 2Document3 pagesPreparation For Speaking 2Em bé MậpPas encore d'évaluation
- Medium Expansion Bridge Plug (ME) : Product DescriptionDocument2 pagesMedium Expansion Bridge Plug (ME) : Product DescriptionWan Abdullah Mahmood100% (1)
- RT809F Programmer All Adapters LCD ReadeDocument5 pagesRT809F Programmer All Adapters LCD ReadeAlif Rizky ibadillahPas encore d'évaluation
- AI Gym Buddy Using MediapipeDocument7 pagesAI Gym Buddy Using MediapipeInternational Journal of Innovative Science and Research TechnologyPas encore d'évaluation
- TNote Fog PDFDocument4 pagesTNote Fog PDFayviwurbayviwurbPas encore d'évaluation
- Amphibious House A Novel Practice As A Flood MitigDocument13 pagesAmphibious House A Novel Practice As A Flood MitigPearlPas encore d'évaluation
- VFP9 All Versions On One ComputerDocument25 pagesVFP9 All Versions On One ComputerJorge PortePas encore d'évaluation
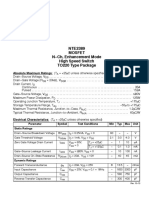
- NTE2389 Mosfet N CH, Enhancement Mode High Speed Switch TO220 Type PackageDocument2 pagesNTE2389 Mosfet N CH, Enhancement Mode High Speed Switch TO220 Type PackagetoroalPas encore d'évaluation
- Mr. Michael Johnston (Orica)Document16 pagesMr. Michael Johnston (Orica)Don CorleonePas encore d'évaluation
- Mohammad Gufran Inst. Tech - MaintenanceDocument3 pagesMohammad Gufran Inst. Tech - Maintenancerazaullahkhan37Pas encore d'évaluation
- Study Guide ML Math PDFDocument4 pagesStudy Guide ML Math PDFjerryPas encore d'évaluation
- Britons Are Increasingly Avoiding The News: Media and SocietyDocument2 pagesBritons Are Increasingly Avoiding The News: Media and SocietyJessica BarbosaPas encore d'évaluation
- Jesd204c Primer Part1Document3 pagesJesd204c Primer Part1Pronadeep BoraPas encore d'évaluation
- Additive ManufacturingDocument13 pagesAdditive ManufacturingPrajwal ChatraPas encore d'évaluation
- Methods of Data CollectionDocument40 pagesMethods of Data Collectionsurekhapawar100% (2)
- HW of Example 3.10Document6 pagesHW of Example 3.10Ahmed AlzaidiPas encore d'évaluation
- Nivelco PlovakDocument2 pagesNivelco PlovakzeljkoradaPas encore d'évaluation
- Queueing Theory: Queueing Theory Is The Mathematical Study of Waiting Lines, orDocument12 pagesQueueing Theory: Queueing Theory Is The Mathematical Study of Waiting Lines, orGabrielPas encore d'évaluation
- Document Downloadsdirect545560516extension PDF&FT 1650273072&Lt 1650276682&user Id 606985587&uahk 6-CMDocument7 pagesDocument Downloadsdirect545560516extension PDF&FT 1650273072&Lt 1650276682&user Id 606985587&uahk 6-CMHà Phương NguyễnPas encore d'évaluation
- Definition and Description: 6.1 Bench TerracesDocument22 pagesDefinition and Description: 6.1 Bench Terracesshafiullah NaseriPas encore d'évaluation
- Harshit Kumar ReportDocument60 pagesHarshit Kumar ReportHarshit RajPas encore d'évaluation
- Machine Learning For Natural Language Processing: Hidden Markov ModelsDocument33 pagesMachine Learning For Natural Language Processing: Hidden Markov ModelsHưngPas encore d'évaluation
- Iec 62053 21Document7 pagesIec 62053 21Arley Villa Salazar33% (3)
- Ch.3 Digital Service Unit (DSU) CabinetDocument14 pagesCh.3 Digital Service Unit (DSU) CabinetMohamed ZakimPas encore d'évaluation
- MT8072iP Datasheet ENGDocument2 pagesMT8072iP Datasheet ENGMohamed SaadPas encore d'évaluation
- Coa SyllabusDocument11 pagesCoa SyllabusSaravana VelPas encore d'évaluation
- Dimplex Cadiz Dry Radiator UKDocument8 pagesDimplex Cadiz Dry Radiator UKDaniel AdebayoPas encore d'évaluation
- GE TMX R+ Fault FindingDocument73 pagesGE TMX R+ Fault FindingPaulo PortelaPas encore d'évaluation
- Cme Ordering GuideDocument27 pagesCme Ordering GuideDavid EcheverriPas encore d'évaluation
- Mental Math Secrets - How To Be a Human CalculatorD'EverandMental Math Secrets - How To Be a Human CalculatorÉvaluation : 5 sur 5 étoiles5/5 (3)
- A Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormD'EverandA Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormÉvaluation : 5 sur 5 étoiles5/5 (5)
- Basic Math & Pre-Algebra Workbook For Dummies with Online PracticeD'EverandBasic Math & Pre-Algebra Workbook For Dummies with Online PracticeÉvaluation : 4 sur 5 étoiles4/5 (2)
- Build a Mathematical Mind - Even If You Think You Can't Have One: Become a Pattern Detective. Boost Your Critical and Logical Thinking Skills.D'EverandBuild a Mathematical Mind - Even If You Think You Can't Have One: Become a Pattern Detective. Boost Your Critical and Logical Thinking Skills.Évaluation : 5 sur 5 étoiles5/5 (1)
- Quantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsD'EverandQuantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsÉvaluation : 4.5 sur 5 étoiles4.5/5 (3)
- Fluent in 3 Months: How Anyone at Any Age Can Learn to Speak Any Language from Anywhere in the WorldD'EverandFluent in 3 Months: How Anyone at Any Age Can Learn to Speak Any Language from Anywhere in the WorldÉvaluation : 3 sur 5 étoiles3/5 (80)
- Calculus Workbook For Dummies with Online PracticeD'EverandCalculus Workbook For Dummies with Online PracticeÉvaluation : 3.5 sur 5 étoiles3.5/5 (8)
- Mathematical Mindsets: Unleashing Students' Potential through Creative Math, Inspiring Messages and Innovative TeachingD'EverandMathematical Mindsets: Unleashing Students' Potential through Creative Math, Inspiring Messages and Innovative TeachingÉvaluation : 4.5 sur 5 étoiles4.5/5 (21)
- Mental Math: How to Develop a Mind for Numbers, Rapid Calculations and Creative Math Tricks (Including Special Speed Math for SAT, GMAT and GRE Students)D'EverandMental Math: How to Develop a Mind for Numbers, Rapid Calculations and Creative Math Tricks (Including Special Speed Math for SAT, GMAT and GRE Students)Pas encore d'évaluation
- Images of Mathematics Viewed Through Number, Algebra, and GeometryD'EverandImages of Mathematics Viewed Through Number, Algebra, and GeometryPas encore d'évaluation
- ParaPro Assessment Preparation 2023-2024: Study Guide with 300 Practice Questions and Answers for the ETS Praxis Test (Paraprofessional Exam Prep)D'EverandParaPro Assessment Preparation 2023-2024: Study Guide with 300 Practice Questions and Answers for the ETS Praxis Test (Paraprofessional Exam Prep)Pas encore d'évaluation
- Math Workshop, Grade K: A Framework for Guided Math and Independent PracticeD'EverandMath Workshop, Grade K: A Framework for Guided Math and Independent PracticeÉvaluation : 5 sur 5 étoiles5/5 (1)
- How Math Explains the World: A Guide to the Power of Numbers, from Car Repair to Modern PhysicsD'EverandHow Math Explains the World: A Guide to the Power of Numbers, from Car Repair to Modern PhysicsÉvaluation : 3.5 sur 5 étoiles3.5/5 (9)
- A-level Maths Revision: Cheeky Revision ShortcutsD'EverandA-level Maths Revision: Cheeky Revision ShortcutsÉvaluation : 3.5 sur 5 étoiles3.5/5 (8)
- A Guide to Success with Math: An Interactive Approach to Understanding and Teaching Orton Gillingham MathD'EverandA Guide to Success with Math: An Interactive Approach to Understanding and Teaching Orton Gillingham MathÉvaluation : 5 sur 5 étoiles5/5 (1)