Vous aimerez peut-être aussi
- AgrremetDocument2 pagesAgrremetridwantpPas encore d'évaluation
- Contoh Pengiriman Dokumen CPNSDocument1 pageContoh Pengiriman Dokumen CPNSchundaPas encore d'évaluation
- Hasil Seleksi Tenaga PeroranganDocument1 pageHasil Seleksi Tenaga PeroranganridwantpPas encore d'évaluation
- Staf Audit InternalDocument1 pageStaf Audit InternalsantriPas encore d'évaluation
- Staf Audit InternalDocument1 pageStaf Audit InternalsantriPas encore d'évaluation
- Kajian Mengenai Siklus RankineDocument3 pagesKajian Mengenai Siklus RankineridwantpPas encore d'évaluation
- 6 Pola Candlestick Yang Paling Menguntungkan Dalam Perdagangan Saham Di Bursa Efek IndonesiaDocument33 pages6 Pola Candlestick Yang Paling Menguntungkan Dalam Perdagangan Saham Di Bursa Efek IndonesiaAgustin Eliasta Ginting100% (28)
- 50 Pertanyaan Yang Paling Sering Ditanyakan Saat Wawancara KerjaDocument76 pages50 Pertanyaan Yang Paling Sering Ditanyakan Saat Wawancara Kerjaekomaja80% (5)
- Soal CPNS2005Document110 pagesSoal CPNS2005dewi2015100% (5)
- Factsheet PDFDocument1 pageFactsheet PDFridwantpPas encore d'évaluation
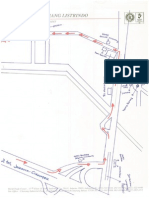
- Denah PT - CL Dari Pintu Tol Cikarang BaratDocument1 pageDenah PT - CL Dari Pintu Tol Cikarang BaratridwantpPas encore d'évaluation
- Analis Perencanaan BisnisDocument2 pagesAnalis Perencanaan BisnisIgnatio BenignoPas encore d'évaluation
- Bem FH Ui 25 27februari2015Document1 pageBem FH Ui 25 27februari2015ridwantpPas encore d'évaluation
- 16 Januari 2014Document2 pages16 Januari 2014ridwantpPas encore d'évaluation
- 50 Pertanyaan Yang Paling Sering Ditanyakan Saat Wawancara KerjaDocument76 pages50 Pertanyaan Yang Paling Sering Ditanyakan Saat Wawancara Kerjaekomaja80% (5)
- Dijadikan Terasa Indah Dalam Pandangan Manusia Cinta Terhadap Apa Yang DiinginkanDocument1 pageDijadikan Terasa Indah Dalam Pandangan Manusia Cinta Terhadap Apa Yang DiinginkanridwantpPas encore d'évaluation
- 1503SBYJF Pengumuman Lowongan Bursa Karir ITS V011Document3 pages1503SBYJF Pengumuman Lowongan Bursa Karir ITS V011reezqeePas encore d'évaluation
- 16 Januari 2014Document2 pages16 Januari 2014ridwantpPas encore d'évaluation
- Abs TrakDocument3 pagesAbs TrakridwantpPas encore d'évaluation
- 16 Januari 2014Document2 pages16 Januari 2014ridwantpPas encore d'évaluation
- Bem FH Ui 25 27februari2015Document1 pageBem FH Ui 25 27februari2015ridwantpPas encore d'évaluation
- Tata Tertib Wisuda Ke 135Document5 pagesTata Tertib Wisuda Ke 135ridwantpPas encore d'évaluation
- BaruDocument2 pagesBaruridwantpPas encore d'évaluation
- Pemanfaatan GelombangDocument9 pagesPemanfaatan GelombangHasrul Putra KamasePas encore d'évaluation
- Makalah Seminar KPDocument3 pagesMakalah Seminar KPridwantpPas encore d'évaluation