Vous aimerez peut-être aussi
- Dirigida Estaticaprimeraleypara Escolaresy Energia para Ciclo NormalDocument6 pagesDirigida Estaticaprimeraleypara Escolaresy Energia para Ciclo NormalWilbert Amanca CordovaPas encore d'évaluation
- Solucionario Del Examen Parcial de Fisica 2Document6 pagesSolucionario Del Examen Parcial de Fisica 2Wilbert Amanca CordovaPas encore d'évaluation
- Simulacro Energia Movimiento Armonico SimpleDocument5 pagesSimulacro Energia Movimiento Armonico SimpleWilbert Amanca CordovaPas encore d'évaluation
- Cantidad de Mov MasDocument31 pagesCantidad de Mov MasWilbert Amanca CordovaPas encore d'évaluation
- Planilla de ArmadosDocument53 pagesPlanilla de ArmadosWilbert Amanca CordovaPas encore d'évaluation
- Energía Mecánica 2015Document4 pagesEnergía Mecánica 2015Wilbert Amanca CordovaPas encore d'évaluation
- Expediente Conforme A ObraDocument49 pagesExpediente Conforme A ObraWilbert Amanca CordovaPas encore d'évaluation
- Trabajo PotenciaDocument6 pagesTrabajo PotenciaWilbert Amanca Cordova100% (1)
- Trabajo PotenciaDocument6 pagesTrabajo PotenciaWilbert Amanca CordovaPas encore d'évaluation
- 1 Plan de Negocios Con IndiceDocument5 pages1 Plan de Negocios Con IndiceWilbert Amanca CordovaPas encore d'évaluation
- Proyecto Helicoferia Ecológica.....Document8 pagesProyecto Helicoferia Ecológica.....Wilbert Amanca CordovaPas encore d'évaluation
- Cuarta Practica de Ee514mDocument10 pagesCuarta Practica de Ee514mWilbert Amanca CordovaPas encore d'évaluation
- Practica de Ecuaciones Escolars Grupo UniDocument4 pagesPractica de Ecuaciones Escolars Grupo UniWilbert Amanca CordovaPas encore d'évaluation
- Solucionario Examen ParcialDocument5 pagesSolucionario Examen ParcialWilbert Amanca CordovaPas encore d'évaluation
- Proyecto Semilla Saco OliverosDocument3 pagesProyecto Semilla Saco OliverosWilbert Amanca CordovaPas encore d'évaluation
- Filtro de ChebyshevDocument8 pagesFiltro de ChebyshevWilbert Amanca CordovaPas encore d'évaluation
- Est A Tic A 1Document4 pagesEst A Tic A 1Froilán GómezPas encore d'évaluation
- Que Es Un InsigtDocument4 pagesQue Es Un InsigtWilbert Amanca CordovaPas encore d'évaluation
- Innovacion en El Desarrollo EmpresarialDocument4 pagesInnovacion en El Desarrollo EmpresarialWilbert Amanca CordovaPas encore d'évaluation
- Trabajo de Comunicacion Efectiva n3Document10 pagesTrabajo de Comunicacion Efectiva n3Eduardo CortezPas encore d'évaluation
- Pat Paita - 14 - 06 - 19Document234 pagesPat Paita - 14 - 06 - 19Hugo Labra100% (2)
- Informe Topográfico - Final Pistas y VeredasDocument41 pagesInforme Topográfico - Final Pistas y VeredasYoselin Yesenia MVPas encore d'évaluation
- 8.0.1.2 Class Activity - Can Submarines Swim InstructionsDocument3 pages8.0.1.2 Class Activity - Can Submarines Swim InstructionsJonathan Carvajal GarcíaPas encore d'évaluation
- Practica Pre Profesional 020 2021 MimpDocument4 pagesPractica Pre Profesional 020 2021 MimpDavid Enríquez CubillasPas encore d'évaluation
- Anexo 4 - Marco ReferencialDocument10 pagesAnexo 4 - Marco Referencialnasly lizethPas encore d'évaluation
- Evaluación de EntradaDocument3 pagesEvaluación de EntradaAlex Tinoco100% (1)
- Fisica2017 PDFDocument131 pagesFisica2017 PDFFilosofia Liceo Santander100% (1)
- s3 MH - DispersionDocument18 pagess3 MH - DispersionJulio Augusto De LuquePas encore d'évaluation
- Planificacion Anual Matematicas 1 BGUDocument7 pagesPlanificacion Anual Matematicas 1 BGUAna Mar�a Cano GilPas encore d'évaluation
- Soluciones A Las Actividades de La Unidad-12 Insólita AguaDocument4 pagesSoluciones A Las Actividades de La Unidad-12 Insólita AguaOscarPas encore d'évaluation
- Anexo 2 - Insumos - Tarea 3Document29 pagesAnexo 2 - Insumos - Tarea 3maria fernanda escamilla rojasPas encore d'évaluation
- Intercambiadores de CabezalDocument6 pagesIntercambiadores de CabezalJocelyne Bruselas AuzaPas encore d'évaluation
- BIOLOGIA 15 DICIEMBRE 3 Bgu 2021 PROYECTO 6Document6 pagesBIOLOGIA 15 DICIEMBRE 3 Bgu 2021 PROYECTO 6ROME StudiosPas encore d'évaluation
- Estado Situacional Diciembre 2021Document11 pagesEstado Situacional Diciembre 2021Centro de Altos Estudios y Desarrollo ProfesionalPas encore d'évaluation
- Comunicacion Celular IDocument45 pagesComunicacion Celular IBryan Socorro100% (1)
- AGROECOLOGIADocument195 pagesAGROECOLOGIABretna MinayaPas encore d'évaluation
- Elementos de Máquinas - Uniones Atornilladas PDFDocument30 pagesElementos de Máquinas - Uniones Atornilladas PDFVictor Guillermo Lanchipa GamarraPas encore d'évaluation
- Actividad de Integración Forma ADocument4 pagesActividad de Integración Forma ACarolina ramirezPas encore d'évaluation
- Nuevas Tecnicas de SoldaduraDocument22 pagesNuevas Tecnicas de SoldaduraDanny Urtecho PontePas encore d'évaluation
- 3333 - 2001 EslingasDocument52 pages3333 - 2001 EslingashferrebusPas encore d'évaluation
- Actividades Sobre La Casa de Bernarda AlbaDocument2 pagesActividades Sobre La Casa de Bernarda AlbaRene MurguiaPas encore d'évaluation
- Cambios en La Actitud Frente A Las Relaciones Entre Hombres y MujeresDocument3 pagesCambios en La Actitud Frente A Las Relaciones Entre Hombres y MujeresEduardo GonzalezPas encore d'évaluation
- Apu Partidas NuevasDocument51 pagesApu Partidas NuevasMaguiber ChvPas encore d'évaluation
- Semana 06 Mci CompresionDocument26 pagesSemana 06 Mci CompresionCristian Rey SanchezPas encore d'évaluation
- Elaboracion de Frutas en AlmibarDocument3 pagesElaboracion de Frutas en Almibarjerson rocaPas encore d'évaluation
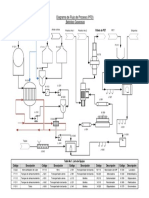
- Diagrama Bebidas GaseosasDocument1 pageDiagrama Bebidas GaseosasJorgePas encore d'évaluation
- N KjeldahlDocument6 pagesN KjeldahlMarioPas encore d'évaluation
- 1r. Consideraciones Generales Del Diseño Estructural - DiapositivasDocument43 pages1r. Consideraciones Generales Del Diseño Estructural - DiapositivasMarco ColomaPas encore d'évaluation
- Codigos Error Canon Ir 1600 o 2000Document4 pagesCodigos Error Canon Ir 1600 o 2000jlsfarinas100% (1)