Vous aimerez peut-être aussi
- Actuators 11 00238 v2Document23 pagesActuators 11 00238 v2Gibs RiveraPas encore d'évaluation
- KSMTE 3pointcontact FinalkDocument15 pagesKSMTE 3pointcontact FinalkGibs RiveraPas encore d'évaluation
- Power Loss in Cylindrical Roller Thrust Bearings Lubricated With Automotive Gear OilsDocument169 pagesPower Loss in Cylindrical Roller Thrust Bearings Lubricated With Automotive Gear OilsGibs RiveraPas encore d'évaluation
- 2022 09 01 - y AcbbDocument8 pages2022 09 01 - y AcbbGibs RiveraPas encore d'évaluation
- Power Loss in Cylindrical Roller Thrust Bearings Lubricated With Automotive Gear OilsDocument169 pagesPower Loss in Cylindrical Roller Thrust Bearings Lubricated With Automotive Gear OilsGibs RiveraPas encore d'évaluation
- Capstone Box PPT - 1122Document2 pagesCapstone Box PPT - 1122Gibs RiveraPas encore d'évaluation
- Ball Bearings Mechanics-NASA ReportDocument105 pagesBall Bearings Mechanics-NASA ReportFabrizio GrassoPas encore d'évaluation
- Skidding Analysis of Angular Contact Ball BearingDocument9 pagesSkidding Analysis of Angular Contact Ball BearingGibs RiveraPas encore d'évaluation
- Ewdd Book 1 FWDocument2 pagesEwdd Book 1 FWGibs RiveraPas encore d'évaluation
- HhhhmrrerefallDocument25 pagesHhhhmrrerefallGibs RiveraPas encore d'évaluation
- Skidding Analysis of Angular Contact Ball BearingDocument9 pagesSkidding Analysis of Angular Contact Ball BearingGibs RiveraPas encore d'évaluation
- Decentralized Control of Active Vehicle Suspensions With PreviewDocument6 pagesDecentralized Control of Active Vehicle Suspensions With PreviewGibs RiveraPas encore d'évaluation
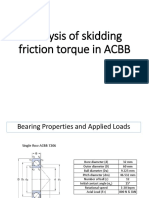
- Analysis of Skidding Friction Torque in ACBBDocument7 pagesAnalysis of Skidding Friction Torque in ACBBGibs RiveraPas encore d'évaluation
- Ch. 3 Final DocuDocument13 pagesCh. 3 Final DocuGibs RiveraPas encore d'évaluation
- A01 Youn6656 09 Ism FMDocument6 pagesA01 Youn6656 09 Ism FMSaleh AwadPas encore d'évaluation
- Guideline For Dual Degree Program-Mechanical System Engineering, Spring 2015Document7 pagesGuideline For Dual Degree Program-Mechanical System Engineering, Spring 2015Gibs RiveraPas encore d'évaluation
- 3 DplotDocument37 pages3 Dplotmarcelo_fis_matPas encore d'évaluation
- Physics Exit Exam ReviewDocument18 pagesPhysics Exit Exam ReviewCha Castillo100% (1)
- PHY Exit 4thQtr 2014Document4 pagesPHY Exit 4thQtr 2014Gibs RiveraPas encore d'évaluation
- PHY Exit 4thQtr 2014 PDFDocument4 pagesPHY Exit 4thQtr 2014 PDFGibs RiveraPas encore d'évaluation
- A Sliding Mode Control of ADocument8 pagesA Sliding Mode Control of AGibs RiveraPas encore d'évaluation
- Modified Skyhook ControlDocument10 pagesModified Skyhook ControlGibs RiveraPas encore d'évaluation
- REVISED Comparative Analysis of A Conventional Vapor Compression System To A Variable Frequency Driven System For Air Conditioning ApplicationDocument101 pagesREVISED Comparative Analysis of A Conventional Vapor Compression System To A Variable Frequency Driven System For Air Conditioning ApplicationGibs RiveraPas encore d'évaluation
- SoMLec BeamDeflectionDocument16 pagesSoMLec BeamDeflectionGibs RiveraPas encore d'évaluation
- Designing The Dynamic BehaviorDocument7 pagesDesigning The Dynamic BehaviorGibs RiveraPas encore d'évaluation
- Control of Suspensions ForDocument8 pagesControl of Suspensions ForGibs RiveraPas encore d'évaluation
- An Adaptive Semiactive ControlDocument10 pagesAn Adaptive Semiactive ControlGibs RiveraPas encore d'évaluation
- 3D Printing Guide PDFDocument77 pages3D Printing Guide PDFKhoa Vũ100% (5)
- Micro LessonDocument1 pageMicro LessonGibs RiveraPas encore d'évaluation
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (120)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Infographic AssignmentDocument5 pagesInfographic Assignmentnael94Pas encore d'évaluation
- N AchDocument9 pagesN Achaysha farihaPas encore d'évaluation
- Class 5 Holiday HomeworkDocument6 pagesClass 5 Holiday HomeworkSamarth Singh100% (1)
- SS 02 Quiz 1 - Answers PDFDocument64 pagesSS 02 Quiz 1 - Answers PDFdumboooodogPas encore d'évaluation
- 11SP Q3 Week-5Document7 pages11SP Q3 Week-5Jose Reymart BariasPas encore d'évaluation
- Personal Ethics and Fraudster Motivation The MissiDocument8 pagesPersonal Ethics and Fraudster Motivation The Missistevany rutina sohPas encore d'évaluation
- (Statistics For Biology and Health) Terry M. Therneau, Patricia M. Grambsch (Auth.) - Modeling Survival Data - Extending The Cox Model-Springer-Verlag New York (2000)Document356 pages(Statistics For Biology and Health) Terry M. Therneau, Patricia M. Grambsch (Auth.) - Modeling Survival Data - Extending The Cox Model-Springer-Verlag New York (2000)LLERZY ESNEIDER TORRES OMEPas encore d'évaluation
- Social Science Disciplines: LessonDocument12 pagesSocial Science Disciplines: LessonJesamie Bactol SeriñoPas encore d'évaluation
- Chapter 2 - Review of Related Literature and StudiesDocument20 pagesChapter 2 - Review of Related Literature and StudiesJoebell VillanuevaPas encore d'évaluation
- The Impact of Career Planning and Career Satisfaction On Employees Turnover IntentionDocument16 pagesThe Impact of Career Planning and Career Satisfaction On Employees Turnover IntentionBhavya ShrivastavaPas encore d'évaluation
- Yu Ye PDFDocument40 pagesYu Ye PDFPrajitha Jinachandran T KPas encore d'évaluation
- Operation Research Note CompleleDocument40 pagesOperation Research Note ComplelefikruPas encore d'évaluation
- 01 - Activity - 2 - FINALDocument3 pages01 - Activity - 2 - FINALTisha Parajeli100% (1)
- Edinburgh University Geography DissertationDocument4 pagesEdinburgh University Geography DissertationCustomNotePaperCanada100% (1)
- Patient Health Education Seminar Powerpoint TemplateDocument11 pagesPatient Health Education Seminar Powerpoint TemplateHarshal SabanePas encore d'évaluation
- Sample 8 - Airlines PDFDocument17 pagesSample 8 - Airlines PDFkaiserousterPas encore d'évaluation
- 1 s2.0 S095965261600038X Main PDFDocument10 pages1 s2.0 S095965261600038X Main PDFAyoub SOUAIPas encore d'évaluation
- University of Birmingham Dissertation FormatDocument4 pagesUniversity of Birmingham Dissertation FormatGhostWriterCollegePapersUK100% (1)
- Beyond Boredom and Anxiety by Mihaly CsikszentmihalyiDocument264 pagesBeyond Boredom and Anxiety by Mihaly CsikszentmihalyiSunny Talwar100% (3)
- Vision of The Department: Programme OutcomesDocument3 pagesVision of The Department: Programme OutcomesPradeep Uday K UPas encore d'évaluation
- Lyapunov Timescales and Black Hole BinariesDocument8 pagesLyapunov Timescales and Black Hole BinariesAlvaro Rafael MartínezPas encore d'évaluation
- Evaluation SheetDocument3 pagesEvaluation Sheetanon_373997473Pas encore d'évaluation
- S02 - S03 - 1 - The Dominant Logic Retrospective and Extension - Bettis N CKP 1995Document11 pagesS02 - S03 - 1 - The Dominant Logic Retrospective and Extension - Bettis N CKP 1995Ravi JosephPas encore d'évaluation
- Project Administrative AssistantDocument1 pageProject Administrative AssistantfponcepePas encore d'évaluation
- Little's Law*: *J. D. C. Little, A proof of the queueing formula: L = λW,Document25 pagesLittle's Law*: *J. D. C. Little, A proof of the queueing formula: L = λW,Mariam MassaȜdehPas encore d'évaluation
- Strosahl ACBS ACT Brief Intervention WorkshopDocument17 pagesStrosahl ACBS ACT Brief Intervention WorkshopJay MikePas encore d'évaluation
- Research Proposal of Role of Cooperatives On Women EmpowermentDocument9 pagesResearch Proposal of Role of Cooperatives On Women EmpowermentSagar SunuwarPas encore d'évaluation
- Title Page Final Na GyudDocument9 pagesTitle Page Final Na GyudJohn Mark Barrientos0% (1)
- Shear Wave Velocity: Comparison Between Centrifuge and Triaxial Based MeasurementsDocument6 pagesShear Wave Velocity: Comparison Between Centrifuge and Triaxial Based MeasurementsLuciano JuniorPas encore d'évaluation
- MMS/M06 Management Training and Development Paper: HRM403 Time: Three Hours Maximum Marks: 70 All Questions Carry Equal MarksDocument4 pagesMMS/M06 Management Training and Development Paper: HRM403 Time: Three Hours Maximum Marks: 70 All Questions Carry Equal Marksvikizza100% (1)