Vous aimerez peut-être aussi
- Improved Direct Back EMF Detection For Sensorless Brushless DC (BLDC) Motor DrivesDocument6 pagesImproved Direct Back EMF Detection For Sensorless Brushless DC (BLDC) Motor DrivesBùi TuyếnPas encore d'évaluation
- A Symmetric Key Multiple Color Image Cipher Based On Cellular Automata, Chaos Theory and Image MixingDocument21 pagesA Symmetric Key Multiple Color Image Cipher Based On Cellular Automata, Chaos Theory and Image MixingBùi TuyếnPas encore d'évaluation
- Obsolete Product(s) - Obsolete Product(s) : AN1103 Application NoteDocument8 pagesObsolete Product(s) - Obsolete Product(s) : AN1103 Application NoteBùi TuyếnPas encore d'évaluation
- 0919 Allegro White Paper v1 Aug 19Document6 pages0919 Allegro White Paper v1 Aug 19Bùi TuyếnPas encore d'évaluation
- MitsubishiDocument4 pagesMitsubishiBùi TuyếnPas encore d'évaluation
- A4945 A4949 DatasheetDocument12 pagesA4945 A4949 DatasheetBùi TuyếnPas encore d'évaluation
- Speed Control of Induction Motor Using Vector or Field Oriented ControlDocument5 pagesSpeed Control of Induction Motor Using Vector or Field Oriented ControlBùi TuyếnPas encore d'évaluation
- Anti WindupDocument15 pagesAnti WindupBraulio GarcesPas encore d'évaluation
- Fast Track TroubleshootingDocument9 pagesFast Track TroubleshootingBùi TuyếnPas encore d'évaluation
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Earth Return Imped v1Document35 pagesEarth Return Imped v1bubo28Pas encore d'évaluation
- Microstep-Driver R60Document12 pagesMicrostep-Driver R60Yudes LiyanagePas encore d'évaluation
- Trans TransmisiDocument31 pagesTrans TransmisimalikPas encore d'évaluation
- Ieee Recommended Practice For The Protection of Wire Line CommunicationDocument134 pagesIeee Recommended Practice For The Protection of Wire Line CommunicationBLASCO ANTONIO PELAEZ CENTENOPas encore d'évaluation
- On The Inductance of Printed SpiralDocument5 pagesOn The Inductance of Printed SpiralshuangwenPas encore d'évaluation
- Naca Mageneto TheoryDocument18 pagesNaca Mageneto TheoryTIMPas encore d'évaluation
- Electrical Power Transmission: Topic:-Constants of Transmission LineDocument21 pagesElectrical Power Transmission: Topic:-Constants of Transmission LineMr Hassan RazaPas encore d'évaluation
- Blogspot McqsDocument61 pagesBlogspot McqsNajam QamarPas encore d'évaluation
- Chapter 3Document46 pagesChapter 3Tewodros ShegawPas encore d'évaluation
- Lab 2Document32 pagesLab 2AyeshaPas encore d'évaluation
- Equivalent Broadband Electrical Circuit of Synchronous Machine Winding For Frequency Response Analysis Based On Gray Box ModelDocument10 pagesEquivalent Broadband Electrical Circuit of Synchronous Machine Winding For Frequency Response Analysis Based On Gray Box ModelrodineicarraroPas encore d'évaluation
- Electrical - Engg 3rd To 6th SemDocument74 pagesElectrical - Engg 3rd To 6th SembikrambhoiPas encore d'évaluation
- Class D RF Power AmplifierDocument12 pagesClass D RF Power AmplifierhaoyuqianPas encore d'évaluation
- Netop Innovatio132Document230 pagesNetop Innovatio132khucngocnahanhPas encore d'évaluation
- Be First Year Fe Engineering Semester 1 2019 October Basic Electrical Engineering Pattern 2019Document2 pagesBe First Year Fe Engineering Semester 1 2019 October Basic Electrical Engineering Pattern 2019NIRAJ CHORDIAPas encore d'évaluation
- Blf177 HF PaDocument25 pagesBlf177 HF PacaidesPas encore d'évaluation
- En - stm32PMSMFOCSDK Getting StartedDocument82 pagesEn - stm32PMSMFOCSDK Getting StartedElyes MbarekPas encore d'évaluation
- Lagos City Polytechnic, IkejaDocument1 pageLagos City Polytechnic, IkejaOlatidoye EzekielPas encore d'évaluation
- AP Physics C: Electricity and Magnetism Practice Test 1Document20 pagesAP Physics C: Electricity and Magnetism Practice Test 1张书Pas encore d'évaluation
- Short Circuit Analysis PDFDocument31 pagesShort Circuit Analysis PDFmarvinPas encore d'évaluation
- The Telephone Circuit: Chapter OutlineDocument34 pagesThe Telephone Circuit: Chapter OutlineLone XRangerPas encore d'évaluation
- 10th Standard Science: Chapter 13 - Magnetic Effects of Electric CurrentDocument18 pages10th Standard Science: Chapter 13 - Magnetic Effects of Electric CurrentNANDANA BSPas encore d'évaluation
- Electromagnetism McqsDocument2 pagesElectromagnetism McqsymeghnaPas encore d'évaluation
- Power Transmission and Distribution Ee368: IndexDocument11 pagesPower Transmission and Distribution Ee368: IndexeloiPas encore d'évaluation
- Principles and Practice of Electrical EngineeringDocument422 pagesPrinciples and Practice of Electrical EngineeringSaiKishorePas encore d'évaluation
- United States Patent (19) (11) Patent Number: 6,130,863: Wang Et Al. (45) Date of Patent: Oct. 10, 2000Document18 pagesUnited States Patent (19) (11) Patent Number: 6,130,863: Wang Et Al. (45) Date of Patent: Oct. 10, 2000KrozePas encore d'évaluation
- A Systematic Approach To Electromagnetic Compatibility Analysis and Design in Utility SystemsDocument8 pagesA Systematic Approach To Electromagnetic Compatibility Analysis and Design in Utility SystemsboopelectraPas encore d'évaluation
- 2 - Transmission Line ParametersDocument83 pages2 - Transmission Line ParametersEshet ShumetPas encore d'évaluation
- EMI Grounding Chap 5Document30 pagesEMI Grounding Chap 5kn2i2062Pas encore d'évaluation
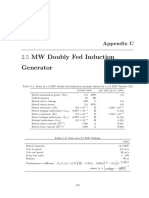
- 2.5 MW Doubly Fed Induction Generator: Appendix CDocument1 page2.5 MW Doubly Fed Induction Generator: Appendix CShaswat JhaPas encore d'évaluation