Vous aimerez peut-être aussi
- 1998 - A Method For VRP With Multiple Vehicle Types and TWDocument11 pages1998 - A Method For VRP With Multiple Vehicle Types and TWBurak ErdemPas encore d'évaluation
- Optimisation For The Ride-Sharing Problem: A Complexity-Based ApproachDocument6 pagesOptimisation For The Ride-Sharing Problem: A Complexity-Based ApproachPhilip ThomasPas encore d'évaluation
- Spanner ATMOSDocument16 pagesSpanner ATMOSPiyalee PattanaikPas encore d'évaluation
- Transportation Demand AnalysisDocument32 pagesTransportation Demand AnalysisAgerico FunelasPas encore d'évaluation
- JN - 2013 - Li - Model and Simulation For Collaborative VRPSPDDocument8 pagesJN - 2013 - Li - Model and Simulation For Collaborative VRPSPDAdrian SerranoPas encore d'évaluation
- AlgorithmdmtrixDocument29 pagesAlgorithmdmtrixVPas encore d'évaluation
- Euro Journal On Computational Optimization: Franziska Theurich, Andreas Fischer, Guntram ScheithauerDocument11 pagesEuro Journal On Computational Optimization: Franziska Theurich, Andreas Fischer, Guntram ScheithauerMauro Michel Ramirez GuerraPas encore d'évaluation
- The Fleet Size and Mix Vehicle Routing Problem: Bruce Golden?, Arjang Assad& Larry Levy and Filip GheysensDocument18 pagesThe Fleet Size and Mix Vehicle Routing Problem: Bruce Golden?, Arjang Assad& Larry Levy and Filip GheysensJonathan VieiraPas encore d'évaluation
- MIP Model For Split Delivery VRP With Fleet & Driver SchedulingDocument5 pagesMIP Model For Split Delivery VRP With Fleet & Driver SchedulingMinh Châu Nguyễn TrầnPas encore d'évaluation
- The Optimization of Logistics Distribution Route Based On Dijkstra's Algorithm and C-W Savings AlgorithmDocument10 pagesThe Optimization of Logistics Distribution Route Based On Dijkstra's Algorithm and C-W Savings AlgorithmShivam GuptaPas encore d'évaluation
- A Practical Transit Network Design MethodDocument13 pagesA Practical Transit Network Design MethodVinay KorukondaPas encore d'évaluation
- Dynamic System-Optimal Traffic Assignment Using A State Space Model'Document22 pagesDynamic System-Optimal Traffic Assignment Using A State Space Model'wendersoncsdepPas encore d'évaluation
- S2 201700035 Fierek Sawicki Ver2Document12 pagesS2 201700035 Fierek Sawicki Ver2Szymon FierekPas encore d'évaluation
- Fagnant Kockelman2018 Article DynamicRide SharingAndFleetSizDocument16 pagesFagnant Kockelman2018 Article DynamicRide SharingAndFleetSizabkhaledPas encore d'évaluation
- Models For Fare Planning in Public Transport: Konrad-Zuse-Zentrum Für Informationstechnik BerlinDocument24 pagesModels For Fare Planning in Public Transport: Konrad-Zuse-Zentrum Für Informationstechnik BerlinCarlos Alfredo Rodriguez LorenzanaPas encore d'évaluation
- A New MathematicalDocument10 pagesA New MathematicalTahityPas encore d'évaluation
- Race Driver ModelDocument14 pagesRace Driver ModelAndrea Fontana100% (1)
- Fleet Size and Mix Operation For Paratransit ServicesDocument8 pagesFleet Size and Mix Operation For Paratransit ServicesCivil Engineering PDFPas encore d'évaluation
- Fast Detour Computation For Ride SharingDocument12 pagesFast Detour Computation For Ride Sharingmadan321Pas encore d'évaluation
- Ei 2020 02Document26 pagesEi 2020 02Arthur NingPas encore d'évaluation
- Dynamic Multi-Period Transportation Model For Vehicle Composition With Transshipment PointsDocument12 pagesDynamic Multi-Period Transportation Model For Vehicle Composition With Transshipment PointsThina ArdlianaPas encore d'évaluation
- A Distributed Metaheuristic For The Transportation Problem: Lcruz@itcm - Edu.mx, Ia32, Juanarturo Jgvaldez50, cggs71Document10 pagesA Distributed Metaheuristic For The Transportation Problem: Lcruz@itcm - Edu.mx, Ia32, Juanarturo Jgvaldez50, cggs71cruzreyeslauraPas encore d'évaluation
- Optimizing Logistic Problem in Automotive Corporations by Linear ProgrammingDocument3 pagesOptimizing Logistic Problem in Automotive Corporations by Linear ProgrammingKamel BrikPas encore d'évaluation
- Stochastic Route Planning For Electric VehiclesDocument17 pagesStochastic Route Planning For Electric VehiclespartyindacityPas encore d'évaluation
- TC KinematicDocument21 pagesTC KinematicMarius DiaconuPas encore d'évaluation
- Gyula I 1972Document17 pagesGyula I 1972Ade Rosa DadiaraPas encore d'évaluation
- Artículo 1 (Extraído de La Ieee Xplore)Document11 pagesArtículo 1 (Extraído de La Ieee Xplore)PepePas encore d'évaluation
- Congestion CostDocument29 pagesCongestion CostAna-Maria CiobicaPas encore d'évaluation
- A Dynamic Route Guidance System Based On Real Traffic Data 2001 European Journal of Operational ResearchDocument7 pagesA Dynamic Route Guidance System Based On Real Traffic Data 2001 European Journal of Operational ResearchMarcoLuisDoradoPinedaPas encore d'évaluation
- An Evaluation of Inter-Vehicle Ad Hoc Networks Based On Realistic Vehicular TracesDocument12 pagesAn Evaluation of Inter-Vehicle Ad Hoc Networks Based On Realistic Vehicular TracesAsma BenTiba Epouse KribiPas encore d'évaluation
- Vehicle Routing Problem - Case Study On Logistics Company in CroatiaDocument15 pagesVehicle Routing Problem - Case Study On Logistics Company in CroatiaSatria Gumilang Kriska NagaraPas encore d'évaluation
- Discrete Optimization: Claudio Contardo, Rafael MartinelliDocument18 pagesDiscrete Optimization: Claudio Contardo, Rafael Martinellielyes elyesPas encore d'évaluation
- Artificial Intelligence Heuristics in Solving Vehicle Routing Problems With Time Window ConstraintsDocument13 pagesArtificial Intelligence Heuristics in Solving Vehicle Routing Problems With Time Window ConstraintsDiego Alejandro MejiaPas encore d'évaluation
- Network Bandwidth Allocation With End-To-End Qos Constraints and Revenue Sharing in Multidomain FederationsDocument12 pagesNetwork Bandwidth Allocation With End-To-End Qos Constraints and Revenue Sharing in Multidomain FederationsWilliam Ramos PaucarPas encore d'évaluation
- Yu and Shen (2020)Document10 pagesYu and Shen (2020)wyp2414305315Pas encore d'évaluation
- Transportation Network PlanningDocument10 pagesTransportation Network PlanningaskarahPas encore d'évaluation
- The Effect of Randomization On Constraint Based Estimation of Elevator Trip Origin-Destination MatricesDocument12 pagesThe Effect of Randomization On Constraint Based Estimation of Elevator Trip Origin-Destination MatricesfreddyjoertyPas encore d'évaluation
- Ngoc 2012 StudyDocument7 pagesNgoc 2012 StudyAhmad ZezoPas encore d'évaluation
- Dual-Mode Distributed Model Predictive Control For Platooning of Con-Nected Vehicles With Nonlinear DynamicsDocument11 pagesDual-Mode Distributed Model Predictive Control For Platooning of Con-Nected Vehicles With Nonlinear DynamicslaeeeqPas encore d'évaluation
- Server Based Dora in Vanets and Its Applications: R.Thenamuthan A.ManikandanDocument6 pagesServer Based Dora in Vanets and Its Applications: R.Thenamuthan A.ManikandanInternational Journal of computational Engineering research (IJCER)Pas encore d'évaluation
- Fast Detour Computation For Ride Sharing: Robert Geisberger, Dennis Luxen, Sabine Neubauer, Peter Sanders, Lars VolkerDocument5 pagesFast Detour Computation For Ride Sharing: Robert Geisberger, Dennis Luxen, Sabine Neubauer, Peter Sanders, Lars Volkermadan321Pas encore d'évaluation
- Planning and Analyzing Transit Networks - An Integrated Approach Regarding Requirements of Passengers and OperatorsDocument24 pagesPlanning and Analyzing Transit Networks - An Integrated Approach Regarding Requirements of Passengers and OperatorsKaio AlmeidaPas encore d'évaluation
- Operating Cost (2005)Document40 pagesOperating Cost (2005)Santiago Mesa GarciaPas encore d'évaluation
- Measurement Based Optimal Multi-Path Routing: Kornmareddy. J. La. Mark A. Shayman, BobbyDocument10 pagesMeasurement Based Optimal Multi-Path Routing: Kornmareddy. J. La. Mark A. Shayman, BobbytunaguvenPas encore d'évaluation
- Mathematical Principles of Road Congestion Pricing: OrionDocument8 pagesMathematical Principles of Road Congestion Pricing: OrionNasr jobairPas encore d'évaluation
- SAP Transport-SrDocument13 pagesSAP Transport-SrsrinuPas encore d'évaluation
- Application of Genetic Algorithm For Scheduling and Schedule Coordination ProblemsDocument19 pagesApplication of Genetic Algorithm For Scheduling and Schedule Coordination ProblemsJosue RamirezPas encore d'évaluation
- Functions and Assignment ResultsDocument49 pagesFunctions and Assignment ResultsRubirajPas encore d'évaluation
- Population Metaheuristics To Solve The Professional Staff Transportation ProblemDocument15 pagesPopulation Metaheuristics To Solve The Professional Staff Transportation ProblemkofiomariPas encore d'évaluation
- Comparing Future Autonomous Electric Taxis With An Existing Free-Floating Carsharing SystemDocument11 pagesComparing Future Autonomous Electric Taxis With An Existing Free-Floating Carsharing Systemlina paola jimenez quevedoPas encore d'évaluation
- Long-Term Travel Demand Forecasting in General Dynamic Transportation NetworksDocument20 pagesLong-Term Travel Demand Forecasting in General Dynamic Transportation NetworksRufa mae BascomptePas encore d'évaluation
- Citation Distributed MPC For Multi-Vehicle Systems Moving in FormationDocument12 pagesCitation Distributed MPC For Multi-Vehicle Systems Moving in FormationTony Y.Pas encore d'évaluation
- VANET Connectivity Analysis: Mohamed Kafsi, Panos Papadimitratos, Olivier Dousse, Tansu Alpcan, Jean-Pierre HubauxDocument10 pagesVANET Connectivity Analysis: Mohamed Kafsi, Panos Papadimitratos, Olivier Dousse, Tansu Alpcan, Jean-Pierre HubauxThiruChPas encore d'évaluation
- The Model of Toll Station Planing: Dongdong Zhu, Furui Dong, Wenyang Shi and Shuang ZhengDocument5 pagesThe Model of Toll Station Planing: Dongdong Zhu, Furui Dong, Wenyang Shi and Shuang ZhengIoannisVourdounisPas encore d'évaluation
- Prediction of Wheel WearDocument20 pagesPrediction of Wheel Wearbenssj100% (1)
- Transportation Research Part C: Feng Shi, Shuo Zhao, Zhao Zhou, Pu Wang, Michael G.H. BellDocument30 pagesTransportation Research Part C: Feng Shi, Shuo Zhao, Zhao Zhou, Pu Wang, Michael G.H. BellNaimatullah Shafaq RahmatyarPas encore d'évaluation
- Transportation Research Part C: A. Juan, J. Faulin, S. Grasman, D. Riera, J. Marull, C. MendezDocument15 pagesTransportation Research Part C: A. Juan, J. Faulin, S. Grasman, D. Riera, J. Marull, C. MendezAditya GuptaPas encore d'évaluation
- An Exact Approach For The Pollution Routing ProblemDocument46 pagesAn Exact Approach For The Pollution Routing ProblemAdrian SerranoPas encore d'évaluation
- Rebalancing Shared Mobility-On-Demand Systems: A Reinforcement Learning ApproachDocument7 pagesRebalancing Shared Mobility-On-Demand Systems: A Reinforcement Learning ApproachSayani MandalPas encore d'évaluation
- Neues verkehrswissenschaftliches Journal - Ausgabe 16: Capacity Research in Urban Rail-Bound Transportation with Special Consideration of Mixed TrafficD'EverandNeues verkehrswissenschaftliches Journal - Ausgabe 16: Capacity Research in Urban Rail-Bound Transportation with Special Consideration of Mixed TrafficPas encore d'évaluation
- SK - Practice - Tests - Mathematics - Grade - 01 PakDocument7 pagesSK - Practice - Tests - Mathematics - Grade - 01 PakAhmed RazaPas encore d'évaluation
- cs-404-01, Sum15, Exam 4 PDFDocument6 pagescs-404-01, Sum15, Exam 4 PDFJohn CrissmanPas encore d'évaluation
- Knowledge: RD THDocument6 pagesKnowledge: RD THPRAGYA SINGHPas encore d'évaluation
- Name: - ScoreDocument5 pagesName: - ScoreWemn JuniofPas encore d'évaluation
- Determinants - DPP 01 (Of Lec 02) - Lakshya JEE 2.0 2024Document3 pagesDeterminants - DPP 01 (Of Lec 02) - Lakshya JEE 2.0 2024Apurv ChitranshPas encore d'évaluation
- FINDING THE VERTEX FOCUS AND DirectriX OF ADocument19 pagesFINDING THE VERTEX FOCUS AND DirectriX OF AJordan Abosama MamalumpongPas encore d'évaluation
- Pyfmi TechDocument45 pagesPyfmi TechCarlos JimenezPas encore d'évaluation
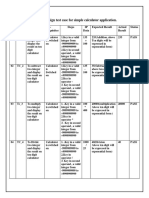
- Experiment No .3-Design Test Case For Simple Calculator ApplicationDocument2 pagesExperiment No .3-Design Test Case For Simple Calculator ApplicationAbrar NadafPas encore d'évaluation
- (Worksheet 7.1) - (Chapter Coordinate Geometry)Document10 pages(Worksheet 7.1) - (Chapter Coordinate Geometry)Praneel Khotre100% (1)
- Rubik's Cube Move Notations ExplanationDocument1 pageRubik's Cube Move Notations Explanationgert.vandeikstraatePas encore d'évaluation
- GAMS - The Solver ManualsDocument556 pagesGAMS - The Solver ManualsArianna IsabellePas encore d'évaluation
- 01 - Introduction To Looking at Learning ... Again, Part 2Document18 pages01 - Introduction To Looking at Learning ... Again, Part 2portucasbasPas encore d'évaluation
- CollegeAlgebra LRDocument1 150 pagesCollegeAlgebra LRJd DibrellPas encore d'évaluation
- Vectors: Sheet 2 Problems (SP2)Document5 pagesVectors: Sheet 2 Problems (SP2)AmrAttiaPas encore d'évaluation
- Does Hegel Have Anything To Say To - Paterson PDFDocument15 pagesDoes Hegel Have Anything To Say To - Paterson PDFg_r_rossiPas encore d'évaluation
- MBBGM CMM10 PDFDocument24 pagesMBBGM CMM10 PDFangelPas encore d'évaluation
- VARIATIONSDocument4 pagesVARIATIONSEugenio MuellaPas encore d'évaluation
- Further Mathematics (Syllabus 9649) : Singapore-Cambridge General Certificate of Education Advanced Level Higher 2 (2022)Document16 pagesFurther Mathematics (Syllabus 9649) : Singapore-Cambridge General Certificate of Education Advanced Level Higher 2 (2022)Po ToPas encore d'évaluation
- SMO Senior 2021Document5 pagesSMO Senior 2021Pro ProPas encore d'évaluation
- Method of Images DielectricsDocument11 pagesMethod of Images DielectricsVigneshwaran KannanPas encore d'évaluation
- Module 3: Buckling of 1D Simply Supported BeamDocument18 pagesModule 3: Buckling of 1D Simply Supported Beamnanduslns07Pas encore d'évaluation
- Inverse Z-TransformsDocument15 pagesInverse Z-TransformsShubham100% (1)
- DGDGDocument66 pagesDGDGmeenuPas encore d'évaluation
- Supplement 4290Document109 pagesSupplement 4290celankanPas encore d'évaluation
- Control System Lab Manual V 1Document173 pagesControl System Lab Manual V 1Engr. M. Farhan Faculty Member UET Kohat100% (1)
- IFEM Ch01Document19 pagesIFEM Ch01Sahir AbasPas encore d'évaluation
- Business Mathematics ModuleDocument79 pagesBusiness Mathematics ModuleGianina De Leon100% (1)
- (Springer Series in Synergetics 60) Yu. A. Kravtsov (Auth.), Professor Dr. Yurii A. Kravtsov (Eds.) - Limits of Predictability-Springer-Verlag Berlin Heidelberg (1993)Document260 pages(Springer Series in Synergetics 60) Yu. A. Kravtsov (Auth.), Professor Dr. Yurii A. Kravtsov (Eds.) - Limits of Predictability-Springer-Verlag Berlin Heidelberg (1993)Ashiq Elahi Design & Application EngineerPas encore d'évaluation
- 337D Differential GeometryDocument6 pages337D Differential Geometryrcindia1Pas encore d'évaluation
- SCHOOL REPORT Mid-Year Year 10 VU Anh Ha 2023-01-19Document11 pagesSCHOOL REPORT Mid-Year Year 10 VU Anh Ha 2023-01-19Vân Gỗ Anpro SànPas encore d'évaluation