Vous aimerez peut-être aussi
- 2021 Individual 20546 (Lawrence, Stephen R. and Bette F.) ClientDocument18 pages2021 Individual 20546 (Lawrence, Stephen R. and Bette F.) ClientVANDA MOOREPas encore d'évaluation
- Innocent Words That Make Her HornyDocument14 pagesInnocent Words That Make Her HornyH69% (13)
- Unit-5 Harmonics & FiltersDocument25 pagesUnit-5 Harmonics & FiltersBhanu100% (1)
- Fellows (Antiques)Document90 pagesFellows (Antiques)messapos100% (1)
- Renaissance PDFDocument54 pagesRenaissance PDF16SA116.HimaniPatelPas encore d'évaluation
- SRS For Travel AgencyDocument5 pagesSRS For Travel AgencyHardik SawalsaPas encore d'évaluation
- Krautheimer, The Constantinian BasilicaDocument33 pagesKrautheimer, The Constantinian BasilicaLady Jovana LazicPas encore d'évaluation
- Cook - 4Q246 Mesiah-Son of God PDFDocument24 pagesCook - 4Q246 Mesiah-Son of God PDFAndy BG 67Pas encore d'évaluation
- Freeman, Ann - Theodulf of Orleans and The Libri CaroliniDocument48 pagesFreeman, Ann - Theodulf of Orleans and The Libri CarolinihboesmanPas encore d'évaluation
- Thesis, John M. Tutuska, Aristotle's Ethical Imprecision. Philosophic Method in The Nicomachean Ethics, University of Dallas 2007.Document242 pagesThesis, John M. Tutuska, Aristotle's Ethical Imprecision. Philosophic Method in The Nicomachean Ethics, University of Dallas 2007.vpglamPas encore d'évaluation
- Icons of Space, Icons in Space, Iconography or Hierotopy?Document63 pagesIcons of Space, Icons in Space, Iconography or Hierotopy?Rostislava Todorova-EnchevaPas encore d'évaluation
- Christ in ApsesDocument12 pagesChrist in ApsesLi_Sa4Pas encore d'évaluation
- Enargeia - A Concept For All SeasonsDocument7 pagesEnargeia - A Concept For All Seasonspraxecao100% (1)
- Decoding The Christian Era of Dionysius Exiguus - J. Naumowicz 2024Document22 pagesDecoding The Christian Era of Dionysius Exiguus - J. Naumowicz 2024Józef NaumowiczPas encore d'évaluation
- Iso 22301 2019 en PDFDocument11 pagesIso 22301 2019 en PDFImam Saleh100% (3)
- Memoirs of The American Academy in Rome Volume XDocument316 pagesMemoirs of The American Academy in Rome Volume XakariyoshikawaPas encore d'évaluation
- Early Islamic Art, 650-1100: Variorum Collected Studies SeriesDocument28 pagesEarly Islamic Art, 650-1100: Variorum Collected Studies SeriesFahri ErcanPas encore d'évaluation
- Transformation of CitiesDocument26 pagesTransformation of CitiesksaplasPas encore d'évaluation
- Material Authenticity in Conservation THDocument30 pagesMaterial Authenticity in Conservation THYusr ShPas encore d'évaluation
- Cutler A. The Date and Significance of The Romanos IvoryDocument9 pagesCutler A. The Date and Significance of The Romanos IvorydragicasmolcicPas encore d'évaluation
- Assimakopoulou-Atzaka, The Iconography of The Mosaic Pavement of The Church at Tell AmarnaDocument53 pagesAssimakopoulou-Atzaka, The Iconography of The Mosaic Pavement of The Church at Tell Amarnaaristarchos76Pas encore d'évaluation
- STW 44 3 2 Model Course Leadership and Teamwork SecretariatDocument49 pagesSTW 44 3 2 Model Course Leadership and Teamwork Secretariatwaranchai83% (6)
- Proceedings of The 22nd International Co PDFDocument430 pagesProceedings of The 22nd International Co PDFrastamanPas encore d'évaluation
- Aspects of Byzantine Conceptions of GenderDocument40 pagesAspects of Byzantine Conceptions of Gendersoar8353838Pas encore d'évaluation
- The Zoe Panel As A Reflection of Change in Eleventh-Century ByzantiumDocument17 pagesThe Zoe Panel As A Reflection of Change in Eleventh-Century ByzantiumVictor Hugo Esquivel100% (1)
- Andrea PalladioDocument4 pagesAndrea PalladioJaylan SandsPas encore d'évaluation
- The Inscribed-Cross Churches in GöremeDocument140 pagesThe Inscribed-Cross Churches in Göremeангел йордановPas encore d'évaluation
- Sevcenko Tomb-Isaak-KomnenosDocument6 pagesSevcenko Tomb-Isaak-KomnenosadashikPas encore d'évaluation
- Curtea de Argesh - Chora Monastery PDFDocument10 pagesCurtea de Argesh - Chora Monastery PDFRostislava Todorova-EnchevaPas encore d'évaluation
- Khrushkova L The Bishops Basilica UvarovDocument52 pagesKhrushkova L The Bishops Basilica UvarovGuido RomanoPas encore d'évaluation
- Jerusalem Pentagram 5Document3 pagesJerusalem Pentagram 5Yash KandaetsPas encore d'évaluation
- Use of Proportions As A Structural Design Tool in Early Christian and Early Medieval ChurchesDocument110 pagesUse of Proportions As A Structural Design Tool in Early Christian and Early Medieval ChurchesYamile Rodriguez AsilisPas encore d'évaluation
- Doula MourikiDocument94 pagesDoula MourikimalipumarhovacPas encore d'évaluation
- Frederick John KieslerDocument4 pagesFrederick John KieslerFernando BragaPas encore d'évaluation
- Byzantine Art in Post-Byzantine Southern ItalyDocument18 pagesByzantine Art in Post-Byzantine Southern ItalyBurak SıdarPas encore d'évaluation
- SpierCole EgyptClassicalWorldDocument187 pagesSpierCole EgyptClassicalWorldGeorgiana GPas encore d'évaluation
- Argan - The Architecture of Brunelleschi and The Origins of Perspective PDFDocument33 pagesArgan - The Architecture of Brunelleschi and The Origins of Perspective PDFTalita Lopes100% (1)
- Andrew Walker White-Performing Orthodox Ritual in Byzantium-Cambridge University Press (2018) PDFDocument288 pagesAndrew Walker White-Performing Orthodox Ritual in Byzantium-Cambridge University Press (2018) PDFOrsolyaHegyiPas encore d'évaluation
- Quintilian - Rhetorical TermsDocument3 pagesQuintilian - Rhetorical TermsIliya GramatikoffPas encore d'évaluation
- Epstein. Tokali KiliseDocument302 pagesEpstein. Tokali KiliseOlga Badan100% (1)
- ST Anastasia in RomeDocument20 pagesST Anastasia in RomePandexaPas encore d'évaluation
- This Content Downloaded From 147.52.192.16 On Sat, 19 Dec 2020 14:56:44 UTCDocument39 pagesThis Content Downloaded From 147.52.192.16 On Sat, 19 Dec 2020 14:56:44 UTCKaterina OrfanakiPas encore d'évaluation
- Byzantine Settlements and Monuments of CDocument10 pagesByzantine Settlements and Monuments of CToni BaghiuPas encore d'évaluation
- Adam Izdebski & Michael Mulryan - Environment and Society in The Long LateDocument7 pagesAdam Izdebski & Michael Mulryan - Environment and Society in The Long Latecarlos murciaPas encore d'évaluation
- Vocotopoulos, Panayotis - Remarks On The Iconography of ST CyrilDocument9 pagesVocotopoulos, Panayotis - Remarks On The Iconography of ST CyrilskeniranaPas encore d'évaluation
- EuclidDocument2 pagesEuclidAnirudhPas encore d'évaluation
- The Church of Sts. Sergius and Bacchus at Constantinople and The Alleged Traditions of Octagonal Palatine ChurchesDocument5 pagesThe Church of Sts. Sergius and Bacchus at Constantinople and The Alleged Traditions of Octagonal Palatine ChurchesseckinevcimPas encore d'évaluation
- Typ004 PDFDocument21 pagesTyp004 PDFSan PPas encore d'évaluation
- Baptism of ApostlesDocument67 pagesBaptism of ApostlesaudubelaiaPas encore d'évaluation
- The Nativity Drama of The Byzantine Church by Egon WelleszDocument8 pagesThe Nativity Drama of The Byzantine Church by Egon WelleszdanielmocanuPas encore d'évaluation
- Krautheimer - 1 BizantDocument9 pagesKrautheimer - 1 Bizantanja100% (1)
- Understanding The Structures of Early CH PDFDocument24 pagesUnderstanding The Structures of Early CH PDFGheorghe AndreeaPas encore d'évaluation
- Guillerme Archaeology of The Section PDFDocument33 pagesGuillerme Archaeology of The Section PDFakshaygoPas encore d'évaluation
- Lössl - Augustine in Byzantium 8Document1 pageLössl - Augustine in Byzantium 8hickathmocPas encore d'évaluation
- Giuseppe Mazzotta - Poetics of History - Inferno XXVIDocument9 pagesGiuseppe Mazzotta - Poetics of History - Inferno XXVIGennaro ScalaPas encore d'évaluation
- Froyshov, Stig Simeon R. - The Early Development of The Liturgical Eight-Mode System in Jerusalem (ST Vladimir's Theological Quarterly, 2007) (Art.)Document44 pagesFroyshov, Stig Simeon R. - The Early Development of The Liturgical Eight-Mode System in Jerusalem (ST Vladimir's Theological Quarterly, 2007) (Art.)Robert-Andrei BălanPas encore d'évaluation
- Icon To Narrative, The Rise of The Dramatic Close-Up in Fifteenth-Century Devotional Painting by Sixten Ringbom Review By: Colin EislerDocument4 pagesIcon To Narrative, The Rise of The Dramatic Close-Up in Fifteenth-Century Devotional Painting by Sixten Ringbom Review By: Colin EislerLubava ChistovaPas encore d'évaluation
- Semi ArianismDocument4 pagesSemi ArianismJoe MagilPas encore d'évaluation
- Gentile and Gold GroundDocument36 pagesGentile and Gold GroundJuan Carlos Montero VallejoPas encore d'évaluation
- Ousterhout Byzantine - Architecture - A - Moving - Target PDFDocument18 pagesOusterhout Byzantine - Architecture - A - Moving - Target PDFAndrei DumitrescuPas encore d'évaluation
- 09 Basilicas MartyriaDocument95 pages09 Basilicas MartyriaAlfredo BizantinoPas encore d'évaluation
- Spo2ida ToolDocument105 pagesSpo2ida Toolbillybob801Pas encore d'évaluation
- Carolingian Art and PoliticsDocument41 pagesCarolingian Art and PoliticsErick FloresPas encore d'évaluation
- Fractal Geometry and Architecture Design PDFDocument12 pagesFractal Geometry and Architecture Design PDFCiobotaru Alexandru IoanPas encore d'évaluation
- Butrint 6: Excavations on the Vrina Plain: Volume 3 - The Roman and late Antique pottery from the Vrina Plain excavationsD'EverandButrint 6: Excavations on the Vrina Plain: Volume 3 - The Roman and late Antique pottery from the Vrina Plain excavationsPas encore d'évaluation
- JJJ PDFDocument32 pagesJJJ PDFJohn Paul S. DucusinPas encore d'évaluation
- Acoustics WHO WHENDocument10 pagesAcoustics WHO WHENkristinePas encore d'évaluation
- Acous Some Historical Developments and Ongoing IssuesDocument11 pagesAcous Some Historical Developments and Ongoing IssueskristinePas encore d'évaluation
- Ten Ways To Improve Your CityDocument22 pagesTen Ways To Improve Your CitykristinePas encore d'évaluation
- Objectives Column1 Specific S Measurable M Attainable A Realistic R Time T Exciting E Recorded RDocument3 pagesObjectives Column1 Specific S Measurable M Attainable A Realistic R Time T Exciting E Recorded RkristinePas encore d'évaluation
- What Is Ur Perfect SchoolDocument2 pagesWhat Is Ur Perfect SchoolkristinePas encore d'évaluation
- Day 1 (Thursda Y) (July 14,2016) 6:00 pm-6:09 PM: Type of Exercis E Time Intensit Y Frequenc YDocument9 pagesDay 1 (Thursda Y) (July 14,2016) 6:00 pm-6:09 PM: Type of Exercis E Time Intensit Y Frequenc YkristinePas encore d'évaluation
- NA ReadingStrategies U5M11L03Document1 pageNA ReadingStrategies U5M11L03Lila AlwaerPas encore d'évaluation
- Zillah P. Curato: ObjectiveDocument1 pageZillah P. Curato: ObjectiveZillah CuratoPas encore d'évaluation
- XXXX96 01 01 2023to28 08 2023Document18 pagesXXXX96 01 01 2023to28 08 2023dabu choudharyPas encore d'évaluation
- (Polish Journal of Sport and Tourism) The Estimation of The RAST Test Usefulness in Monitoring The Anaerobic Capacity of Sprinters in AthleticsDocument5 pages(Polish Journal of Sport and Tourism) The Estimation of The RAST Test Usefulness in Monitoring The Anaerobic Capacity of Sprinters in AthleticsAfiziePas encore d'évaluation
- Nails Care: Word Search: Name: - DateDocument1 pageNails Care: Word Search: Name: - DateDeverly Hernandez Balba-AmplayoPas encore d'évaluation
- CrimDocument29 pagesCrimkeziahmae.bagacinaPas encore d'évaluation
- Panera Bread Case StudyDocument28 pagesPanera Bread Case Studyapi-459978037Pas encore d'évaluation
- Uniden PowerMax 5.8Ghz-DSS5865 - 5855 User Manual PDFDocument64 pagesUniden PowerMax 5.8Ghz-DSS5865 - 5855 User Manual PDFtradosevic4091Pas encore d'évaluation
- Shoshana Bulka PragmaticaDocument17 pagesShoshana Bulka PragmaticaJessica JonesPas encore d'évaluation
- EDAG0007Document5 pagesEDAG0007krunalPas encore d'évaluation
- Final Quiz 2 - Attempt ReviewDocument6 pagesFinal Quiz 2 - Attempt Reviewkoraijohnson7Pas encore d'évaluation
- Ortho TechnologyDocument196 pagesOrtho Technologyr3doc3Pas encore d'évaluation
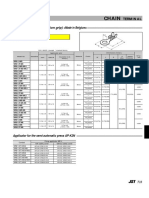
- Chain: SRB Series (With Insulation Grip)Document1 pageChain: SRB Series (With Insulation Grip)shankarPas encore d'évaluation
- Sustainable Strategic Management BarbosaDocument11 pagesSustainable Strategic Management BarbosapurwawardhaniPas encore d'évaluation
- AN44061A Panasonic Electronic Components Product DetailsDocument3 pagesAN44061A Panasonic Electronic Components Product DetailsAdam StariusPas encore d'évaluation
- 2nd Second Sun of Advent (B)Document4 pages2nd Second Sun of Advent (B)Max PolakPas encore d'évaluation
- Aex-Kissan KeralaDocument25 pagesAex-Kissan Keralabsh08070Pas encore d'évaluation
- 1.classification of Reciprocating PumpsDocument8 pages1.classification of Reciprocating Pumpsgonri lynnPas encore d'évaluation
- ING C1 CO JUN2016 CorrectorDocument6 pagesING C1 CO JUN2016 CorrectoraciamePas encore d'évaluation
- 1 AlarmvalveDocument9 pages1 AlarmvalveAnandPas encore d'évaluation
- CryptogrophyDocument37 pagesCryptogrophyFarah EssidPas encore d'évaluation
- The Sandbox Approach and Its Potential For Use inDocument13 pagesThe Sandbox Approach and Its Potential For Use invalentina sekarPas encore d'évaluation
- Very Hungry Caterpillar Clip CardsDocument5 pagesVery Hungry Caterpillar Clip CardsARTGRAVETO ARTPas encore d'évaluation