Vous aimerez peut-être aussi
- IT 1252 - Digital Signal ProcessingDocument22 pagesIT 1252 - Digital Signal Processinganon-384794100% (3)
- DSP Qs 2marksDocument36 pagesDSP Qs 2marksanon_624151290Pas encore d'évaluation
- Iso 16399-2014-05Document52 pagesIso 16399-2014-05nadim100% (1)
- Interactions between Electromagnetic Fields and Matter: Vieweg Tracts in Pure and Applied PhysicsD'EverandInteractions between Electromagnetic Fields and Matter: Vieweg Tracts in Pure and Applied PhysicsPas encore d'évaluation
- ASTRO UserguideDocument1 054 pagesASTRO UserguideMarwan Ahmed100% (1)
- Digital Signal ProcessingDocument22 pagesDigital Signal Processingtdhinakaran100% (1)
- Coriolis - Atlas CompendiumDocument62 pagesCoriolis - Atlas CompendiumSquamata100% (2)
- Spectrum AnalysisDocument35 pagesSpectrum AnalysisdogueylerPas encore d'évaluation
- Method Statement Pressure TestingDocument15 pagesMethod Statement Pressure TestingAkmaldeen AhamedPas encore d'évaluation
- Feynman Lectures Simplified 2C: Electromagnetism: in Relativity & in Dense MatterD'EverandFeynman Lectures Simplified 2C: Electromagnetism: in Relativity & in Dense MatterPas encore d'évaluation
- Power System Protective Relaying-Part FourDocument103 pagesPower System Protective Relaying-Part FourMohammedSaadaniHassani100% (2)
- Easy(er) Electrical Principles for Extra Class Ham License (2012-2016)D'EverandEasy(er) Electrical Principles for Extra Class Ham License (2012-2016)Pas encore d'évaluation
- Solution of The ST Venant Equations (Part 2)Document61 pagesSolution of The ST Venant Equations (Part 2)abdul_348100% (2)
- Final Reflective Essay by Georgi ShopovDocument7 pagesFinal Reflective Essay by Georgi ShopovMd Siddique UllahPas encore d'évaluation
- Introduction to Non-Linear Mechanics. (AM-11), Volume 11D'EverandIntroduction to Non-Linear Mechanics. (AM-11), Volume 11Pas encore d'évaluation
- Discrete-Time Signals and SystemsDocument29 pagesDiscrete-Time Signals and SystemsShailja PattanaikPas encore d'évaluation
- Experiment # 1: Time and Frequency Responses of Series RLC CircuitsDocument6 pagesExperiment # 1: Time and Frequency Responses of Series RLC CircuitsJhonn HuamFloPas encore d'évaluation
- Lect 10Document9 pagesLect 10अमरेश झाPas encore d'évaluation
- Experiments1 5Document15 pagesExperiments1 5Sameer ShaikhPas encore d'évaluation
- Autocorrelation LTI SystemDocument12 pagesAutocorrelation LTI Systemmadsud69Pas encore d'évaluation
- Chapter 10. Sequences and Series of Functions: N N N N N NDocument81 pagesChapter 10. Sequences and Series of Functions: N N N N N NMarcos ViníciusPas encore d'évaluation
- Behaviour of Nonlinear SystemsDocument11 pagesBehaviour of Nonlinear SystemsCheenu SinghPas encore d'évaluation
- DSP LECTURE 1 - CLASSIFICATION OF SIGNALSDocument65 pagesDSP LECTURE 1 - CLASSIFICATION OF SIGNALSVinoth MuruganPas encore d'évaluation
- Elec 264 ReviewDocument114 pagesElec 264 ReviewQuangdai Le100% (1)
- 4.3 2-D Discrete Cosine Transforms: N N K N N K N N X K K XDocument19 pages4.3 2-D Discrete Cosine Transforms: N N K N N K N N X K K Xnayeem4444Pas encore d'évaluation
- Lecture 9: Brief Summary of Digital Signal Processing.: 1.1 OperationsDocument15 pagesLecture 9: Brief Summary of Digital Signal Processing.: 1.1 OperationsAce SilvestrePas encore d'évaluation
- Modern and Nonlinear OpticsDocument181 pagesModern and Nonlinear Opticssoma_venuPas encore d'évaluation
- 2 Marks - CseDocument20 pages2 Marks - CserdjeyanPas encore d'évaluation
- Signals and Systems: University Tenaga NasionalDocument15 pagesSignals and Systems: University Tenaga Nasionalgahbi7Pas encore d'évaluation
- 1-Module3 - Time Domain AnalysisDocument12 pages1-Module3 - Time Domain AnalysisShashankaPas encore d'évaluation
- Rajalakshmi Engineering College, ThandalamDocument40 pagesRajalakshmi Engineering College, Thandalamaarthy1207vaishnavPas encore d'évaluation
- Travelling Waves: Transients in Transmission LinesDocument56 pagesTravelling Waves: Transients in Transmission Linesjcmee100% (2)
- LECT - 2 Discrete-Time Systems ConvolutionDocument44 pagesLECT - 2 Discrete-Time Systems ConvolutionTazeb AyelePas encore d'évaluation
- Fourier Series and Transforms for Discrete-Time SignalsDocument17 pagesFourier Series and Transforms for Discrete-Time SignalsMuhammad AqilPas encore d'évaluation
- Ensemble Average and Time AverageDocument31 pagesEnsemble Average and Time Averageilg1Pas encore d'évaluation
- Explore Time & Freq Responses of RLC CircuitsDocument8 pagesExplore Time & Freq Responses of RLC CircuitsRudra MishraPas encore d'évaluation
- Discrete - Time System and AnalysisDocument113 pagesDiscrete - Time System and Analysisapaijas0% (2)
- Digital Signal Processing Important 2 Two Mark Question and Answer IT 1252Document14 pagesDigital Signal Processing Important 2 Two Mark Question and Answer IT 1252startedforfunPas encore d'évaluation
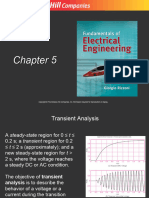
- Chapter 5 Lecture PowerPointDocument34 pagesChapter 5 Lecture PowerPointKarthik IlangoPas encore d'évaluation
- Unit I - Discrete Fourier Transform Part - ADocument10 pagesUnit I - Discrete Fourier Transform Part - AindhuPas encore d'évaluation
- Drift-Diffusion Model: Introduction: Dragica VasileskaDocument9 pagesDrift-Diffusion Model: Introduction: Dragica VasileskaLê Văn TrungPas encore d'évaluation
- Lab Report 1Document31 pagesLab Report 1Kristi GadeshiPas encore d'évaluation
- The Discrete Cosine Transform: Eigenvectors of CosinesDocument13 pagesThe Discrete Cosine Transform: Eigenvectors of CosinesManuel FlorezPas encore d'évaluation
- Emission and Absorption of Light Shape of The Emission BandDocument17 pagesEmission and Absorption of Light Shape of The Emission BandSemakalu AntonioPas encore d'évaluation
- Time, Frequency Analysis of SignalsDocument78 pagesTime, Frequency Analysis of SignalsstephanPas encore d'évaluation
- It1252 Digital Signal ProcessingDocument22 pagesIt1252 Digital Signal ProcessingainugiriPas encore d'évaluation
- 183 EEE311Lesson2 PDFDocument35 pages183 EEE311Lesson2 PDFMasud SarkerPas encore d'évaluation
- Continuity EquationDocument9 pagesContinuity EquationEucharia100% (1)
- MexhatDocument4 pagesMexhatSupratim SahaPas encore d'évaluation
- 3.3. Phase and Amplitude Errors of 1-D Advection EquationDocument52 pages3.3. Phase and Amplitude Errors of 1-D Advection EquationSamKtkPas encore d'évaluation
- Lab 7 Dynamic Parameters of 2 Order Measurement SystemsDocument6 pagesLab 7 Dynamic Parameters of 2 Order Measurement Systemsraylo4594Pas encore d'évaluation
- Electromagnetic Oscillations and Alternating Current: in This Chapter We Will Cover The Following TopicsDocument31 pagesElectromagnetic Oscillations and Alternating Current: in This Chapter We Will Cover The Following Topicsnadir9999Pas encore d'évaluation
- DTFT ContinueDocument51 pagesDTFT Continueraskal23Pas encore d'évaluation
- Ni Two Marks - NewDocument37 pagesNi Two Marks - NewAnuishuya SugumaranPas encore d'évaluation
- EE6403 Discrete Time Systems and Signal Processing NotesDocument20 pagesEE6403 Discrete Time Systems and Signal Processing NotesishuPas encore d'évaluation
- CHAPTER 2 Discrete Fourier TransformDocument75 pagesCHAPTER 2 Discrete Fourier TransformSiddarth MadanPas encore d'évaluation
- Ph5 Chapter ResonantcircuitsDocument21 pagesPh5 Chapter Resonantcircuitsdanitranoster8512Pas encore d'évaluation
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)D'EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Pas encore d'évaluation
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99D'EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99Pas encore d'évaluation
- Fundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsD'EverandFundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsPas encore d'évaluation
- Analysis and Design of Multicell DC/DC Converters Using Vectorized ModelsD'EverandAnalysis and Design of Multicell DC/DC Converters Using Vectorized ModelsPas encore d'évaluation
- Random Fourier Series with Applications to Harmonic Analysis. (AM-101), Volume 101D'EverandRandom Fourier Series with Applications to Harmonic Analysis. (AM-101), Volume 101Pas encore d'évaluation
- Sequences and Infinite Series, A Collection of Solved ProblemsD'EverandSequences and Infinite Series, A Collection of Solved ProblemsPas encore d'évaluation
- DC To DC Converters With PspiceDocument22 pagesDC To DC Converters With PspicequrashimoinPas encore d'évaluation
- Xii Preface To Second EditionDocument1 pageXii Preface To Second EditionqurashimoinPas encore d'évaluation
- RangeNull PDFDocument2 pagesRangeNull PDFqurashimoinPas encore d'évaluation
- Social InstitutionDocument41 pagesSocial InstitutionqurashimoinPas encore d'évaluation
- Simulink HandoutDocument193 pagesSimulink HandoutqurashimoinPas encore d'évaluation
- Signal & Stem Solved 1Document1 pageSignal & Stem Solved 1qurashimoinPas encore d'évaluation
- 10 1 1 112 2812Document49 pages10 1 1 112 2812Abdulazeez Ayomide AdebimpePas encore d'évaluation
- Current Affairs Pakistan 2018Document10 pagesCurrent Affairs Pakistan 2018qurashimoinPas encore d'évaluation
- Mass CommunicationDocument16 pagesMass CommunicationMîãn ĪrfæńPas encore d'évaluation
- SampleDocument2 792 pagesSamplequrashimoinPas encore d'évaluation
- Integral TableDocument14 pagesIntegral TablesparkshockPas encore d'évaluation
- Lecture 9 WorkplaceDocument29 pagesLecture 9 WorkplacequrashimoinPas encore d'évaluation
- Ijrras 10 2 06 PDFDocument28 pagesIjrras 10 2 06 PDFYume YumePas encore d'évaluation
- DSDocument10 pagesDSqurashimoinPas encore d'évaluation
- Mass Media Amaima Final Document of Article PDFDocument20 pagesMass Media Amaima Final Document of Article PDFqurashimoinPas encore d'évaluation
- Assignment HTDocument20 pagesAssignment HTqurashimoinPas encore d'évaluation
- Case Study Sample PDFDocument8 pagesCase Study Sample PDFqurashimoinPas encore d'évaluation
- Forms of CommunicationDocument3 pagesForms of CommunicationqurashimoinPas encore d'évaluation
- New Text Document 2Document1 pageNew Text Document 2qurashimoinPas encore d'évaluation
- S Shaped TubesDocument4 pagesS Shaped TubesqurashimoinPas encore d'évaluation
- Hosts UmbrellaDocument1 pageHosts UmbrellaFabsor SoralPas encore d'évaluation
- Course Info-NM ElectricalDocument3 pagesCourse Info-NM ElectricalqurashimoinPas encore d'évaluation
- Applying Graph Theory to Map ColoringDocument25 pagesApplying Graph Theory to Map ColoringAnonymous BOreSFPas encore d'évaluation
- GF26.10-S-0002S Manual Transmission (MT), Function 9.7.03 Transmission 716.6 in MODEL 639.601 /603 /605 /701 /703 /705 /711 /713 /811 /813 /815Document2 pagesGF26.10-S-0002S Manual Transmission (MT), Function 9.7.03 Transmission 716.6 in MODEL 639.601 /603 /605 /701 /703 /705 /711 /713 /811 /813 /815Sven GoshcPas encore d'évaluation
- 45 - Altivar 61 Plus Variable Speed DrivesDocument130 pages45 - Altivar 61 Plus Variable Speed Drivesabdul aziz alfiPas encore d'évaluation
- Electronic Throttle ControlDocument67 pagesElectronic Throttle Controlmkisa70100% (1)
- Job Interview CV TipsDocument2 pagesJob Interview CV TipsCarlos Moraga Copier100% (1)
- NT140WHM N46Document34 pagesNT140WHM N46arif.fahmiPas encore d'évaluation
- Applied SciencesDocument25 pagesApplied SciencesMario BarbarossaPas encore d'évaluation
- Determination of Salicylic Acid'S Level in Acne Cream Which Sold in Kemiling Using Spektrofotmetry Uv VisDocument7 pagesDetermination of Salicylic Acid'S Level in Acne Cream Which Sold in Kemiling Using Spektrofotmetry Uv VisJuan LambeyPas encore d'évaluation
- Mumbai Tourist Attractions.Document2 pagesMumbai Tourist Attractions.Guru SanPas encore d'évaluation
- MRI Week3 - Signal - Processing - TheoryDocument43 pagesMRI Week3 - Signal - Processing - TheoryaboladePas encore d'évaluation
- New Pacific Timber v. Señeris, 101 SCRA 686Document5 pagesNew Pacific Timber v. Señeris, 101 SCRA 686Ishmael AbrahamPas encore d'évaluation
- Facebook TemplateDocument2 pagesFacebook Templateapi-352106462Pas encore d'évaluation
- Rieka Fitri Sutrisno-CGK-SXBHSY-BTH-FLIGHT - ORIGINATINGDocument2 pagesRieka Fitri Sutrisno-CGK-SXBHSY-BTH-FLIGHT - ORIGINATINGfairuz fanaPas encore d'évaluation
- A-00 IndexDocument10 pagesA-00 IndexNizarHamrouniPas encore d'évaluation
- Regional Office X: Republic of The PhilippinesDocument2 pagesRegional Office X: Republic of The PhilippinesCoreine Imee ValledorPas encore d'évaluation
- Liebert PEX+: High Efficiency. Modular-Type Precision Air Conditioning UnitDocument19 pagesLiebert PEX+: High Efficiency. Modular-Type Precision Air Conditioning Unitjuan guerreroPas encore d'évaluation
- Securifire 1000-ExtractedDocument2 pagesSecurifire 1000-ExtractedWilkeey EstrellanesPas encore d'évaluation
- SBLO Jepp Charts PDFDocument12 pagesSBLO Jepp Charts PDFElton CacefoPas encore d'évaluation
- Polygon shapes solve complex mechanical problemsDocument6 pagesPolygon shapes solve complex mechanical problemskristoffer_mosshedenPas encore d'évaluation
- Writing Lesson Plan LMDocument6 pagesWriting Lesson Plan LMapi-457032696Pas encore d'évaluation
- Bron 2017Document73 pagesBron 2017Anggia BungaPas encore d'évaluation
- Investigation Report on Engine Room Fire on Ferry BerlinDocument63 pagesInvestigation Report on Engine Room Fire on Ferry Berlin卓文翔Pas encore d'évaluation
- Sonochemical Synthesis of NanomaterialsDocument13 pagesSonochemical Synthesis of NanomaterialsMarcos LoredoPas encore d'évaluation
- AE3212 I 2 Static Stab 1 AcDocument23 pagesAE3212 I 2 Static Stab 1 AcRadj90Pas encore d'évaluation
- Ajwin Handbuch enDocument84 pagesAjwin Handbuch enEnzo AguilarPas encore d'évaluation