Vous aimerez peut-être aussi
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1D'EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Évaluation : 2.5 sur 5 étoiles2.5/5 (3)
- Hiab 320Document152 pagesHiab 320Jasbir Jammu Repairing & Maintence LLCPas encore d'évaluation
- Generator and Transmission Line StabilityDocument27 pagesGenerator and Transmission Line StabilityDan GrayPas encore d'évaluation
- Generator and Transmission Line StabilityDocument27 pagesGenerator and Transmission Line StabilityDan GrayPas encore d'évaluation
- Paralleling Generators for Increased Power CapacityDocument4 pagesParalleling Generators for Increased Power Capacitysaber marriotte durimanPas encore d'évaluation
- LimitsDocument6 pagesLimitsDan GrayPas encore d'évaluation
- Circulating Currents in Parallel GeneratorsDocument4 pagesCirculating Currents in Parallel GeneratorsHenryGalt100% (3)
- Electronic Control Systems Presentation Word 2007Document127 pagesElectronic Control Systems Presentation Word 2007Dan GrayPas encore d'évaluation
- 61 - DieselEngine Black StartDocument12 pages61 - DieselEngine Black StartLincoln Eng100% (1)
- LoadingDocument12 pagesLoadingDan GrayPas encore d'évaluation
- LoadingDocument12 pagesLoadingDan GrayPas encore d'évaluation
- LoadingDocument12 pagesLoadingDan GrayPas encore d'évaluation
- LoadingDocument12 pagesLoadingDan GrayPas encore d'évaluation
- Preparing To Synchronize A Generator To The GridDocument3 pagesPreparing To Synchronize A Generator To The GridVarun KumarPas encore d'évaluation
- ENERGY CONVERSION II - LOAD SHARING OF SYNCHRONOUS GENERATORSDocument49 pagesENERGY CONVERSION II - LOAD SHARING OF SYNCHRONOUS GENERATORSbishal alamPas encore d'évaluation
- Science: Quarter 3 - Module 6: Factors Affecting The Strength of An ElectromagnetDocument12 pagesScience: Quarter 3 - Module 6: Factors Affecting The Strength of An ElectromagnetChester Allan EduriaPas encore d'évaluation
- Parallel Operation of AC GeneratorsDocument4 pagesParallel Operation of AC Generatorsgsantosh06Pas encore d'évaluation
- ExcitationDocument5 pagesExcitationDan GrayPas encore d'évaluation
- Parallel Operation With A Network SystemDocument27 pagesParallel Operation With A Network Systemsaulcastano6556100% (3)
- What Is Generator Synchronization1Document10 pagesWhat Is Generator Synchronization1huzaifa tariqPas encore d'évaluation
- Parallel Operation of GeneratorsDocument8 pagesParallel Operation of GeneratorsVladimir100% (1)
- Power Electronics Applied to Industrial Systems and Transports, Volume 3: Switching Power SuppliesD'EverandPower Electronics Applied to Industrial Systems and Transports, Volume 3: Switching Power SuppliesPas encore d'évaluation
- EE133L Parallel Operation of Alternators LabDocument9 pagesEE133L Parallel Operation of Alternators LabJohn Patrick Celda100% (1)
- BG101-S20P4A: 1、Functional keys introductionDocument10 pagesBG101-S20P4A: 1、Functional keys introductionLuis Henriqüe Jr.Pas encore d'évaluation
- ExcitationsysDocument5 pagesExcitationsysDan GrayPas encore d'évaluation
- Air Cadet Pumps ManualDocument12 pagesAir Cadet Pumps ManualEdgar Campusano SanchezPas encore d'évaluation
- Maintain stand-alone solar PV systemsDocument14 pagesMaintain stand-alone solar PV systemsEdmund YoongPas encore d'évaluation
- A B C A B C: Load Generator 1Document19 pagesA B C A B C: Load Generator 1Oscar Bryan MagtibayPas encore d'évaluation
- Interacoustics As216 Screening AudiometerDocument34 pagesInteracoustics As216 Screening Audiometerjuvillegas0% (1)
- Parallel Driving of Synchronous GeneratorDocument7 pagesParallel Driving of Synchronous GeneratorMKIBETUPas encore d'évaluation
- Suffers A: Bus From TheDocument13 pagesSuffers A: Bus From TheAnonymous dqbb02DUhPas encore d'évaluation
- FiniteDocument7 pagesFiniteDan GrayPas encore d'évaluation
- Parallel Operation of DC GeneratorDocument9 pagesParallel Operation of DC Generatormark ianPas encore d'évaluation
- Parallel GeneratorsDocument4 pagesParallel GeneratorsMariam FatimaPas encore d'évaluation
- Control Loops in power systemsDocument22 pagesControl Loops in power systemsMuntadher AbbasPas encore d'évaluation
- Voltage Regulator Controls Parallel Generator Load SharingDocument41 pagesVoltage Regulator Controls Parallel Generator Load SharingDuy DKPas encore d'évaluation
- Char & Paralel DC GenDocument22 pagesChar & Paralel DC GenMuhammad SohilPas encore d'évaluation
- DC Generators Parallel OperationDocument13 pagesDC Generators Parallel OperationJithin JosePas encore d'évaluation
- Parallel Operation of Synchronous Generators Sharing of Active and Reactive PowerDocument3 pagesParallel Operation of Synchronous Generators Sharing of Active and Reactive PowerRajeev ValunjkarPas encore d'évaluation
- Regeling Parallel Bedrijf, StromenDocument29 pagesRegeling Parallel Bedrijf, StromenjhfverhoevenPas encore d'évaluation
- Voltage Regulation GeneratorsDocument29 pagesVoltage Regulation Generatorsprabhakaran_hdecPas encore d'évaluation
- Droop and CCCT (Good)Document7 pagesDroop and CCCT (Good)Kan MPas encore d'évaluation
- Generator Behavior on an Infinite BusDocument7 pagesGenerator Behavior on an Infinite BusAnonymous dqbb02DUhPas encore d'évaluation
- Synchronous Generator Supplying An Infinite Grid Objective SDocument4 pagesSynchronous Generator Supplying An Infinite Grid Objective SDan GrayPas encore d'évaluation
- VR&ParallelOper PDFDocument42 pagesVR&ParallelOper PDFKien TranPas encore d'évaluation
- Untitled DocumentDocument4 pagesUntitled DocumentgggggPas encore d'évaluation
- Synchronizing generator conditionsDocument2 pagesSynchronizing generator conditionsSumbal MehmoodPas encore d'évaluation
- Experiment 6: MATLAB SimulationDocument6 pagesExperiment 6: MATLAB SimulationzawirPas encore d'évaluation
- DC AcDocument5 pagesDC Acshahzad041Pas encore d'évaluation
- PV GENERATORS GRID SUPPORTDocument9 pagesPV GENERATORS GRID SUPPORTthe_val2002Pas encore d'évaluation
- Reverse PowerDocument6 pagesReverse PowerEdward DineshPas encore d'évaluation
- Synchronous Generator II PDFDocument20 pagesSynchronous Generator II PDFCh. Ali GhafoorPas encore d'évaluation
- AGN 017 - Unbalanced Loads: Application Guidance Notes: Technical Information From Cummins Generator TechnologiesDocument9 pagesAGN 017 - Unbalanced Loads: Application Guidance Notes: Technical Information From Cummins Generator TechnologiesJhay Phee LlorentePas encore d'évaluation
- Prime Movers, Voltage Regulators, And Power GenerationDocument5 pagesPrime Movers, Voltage Regulators, And Power GenerationdskymaximusPas encore d'évaluation
- Excitation SystemDocument10 pagesExcitation SystembhulookPas encore d'évaluation
- Gen Synch Conditions Write UpDocument5 pagesGen Synch Conditions Write UpanandPas encore d'évaluation
- Fig. 2 (A) Self Excited Induction GeneratorDocument7 pagesFig. 2 (A) Self Excited Induction GeneratorLaxmikant BagalePas encore d'évaluation
- Lecture 9-Power - System - Control - and - StabilityDocument8 pagesLecture 9-Power - System - Control - and - Stabilityibrahim muhammad yusufPas encore d'évaluation
- Preparing To Synchronize A Generator To The GridDocument4 pagesPreparing To Synchronize A Generator To The Griddijayof87Pas encore d'évaluation
- Power Systems Final ReportDocument8 pagesPower Systems Final ReportJonathan BukenyaPas encore d'évaluation
- Var PFDocument8 pagesVar PFSISWANTOPas encore d'évaluation
- Electric Machines Lab: Open Ended Lab ReportDocument8 pagesElectric Machines Lab: Open Ended Lab ReportSaadPas encore d'évaluation
- Marine Diesel Engineviva QuestionDocument18 pagesMarine Diesel Engineviva Questionisteeaq.mmPas encore d'évaluation
- Voltage Control and Power Factor Improvement TechniquesDocument24 pagesVoltage Control and Power Factor Improvement Techniquesrv_andePas encore d'évaluation
- Generator Operation Curve ExplainDocument10 pagesGenerator Operation Curve ExplainThar LayPas encore d'évaluation
- Characteristics of (A) Compound Generator and (B) Series GeneratorDocument4 pagesCharacteristics of (A) Compound Generator and (B) Series Generatorhsejmal12345Pas encore d'évaluation
- Synchronous GeneratorDocument17 pagesSynchronous GeneratorAwais004Pas encore d'évaluation
- International Journal of Engineering Research and Development (IJERD)Document6 pagesInternational Journal of Engineering Research and Development (IJERD)IJERDPas encore d'évaluation
- Stat Com SimDocument8 pagesStat Com SimmakroumPas encore d'évaluation
- Development of An Independent Type of Hybrid Power Generation SystemDocument5 pagesDevelopment of An Independent Type of Hybrid Power Generation Systemnaeem05Pas encore d'évaluation
- Ward-Leonard Speed Control Method for DC MotorsDocument6 pagesWard-Leonard Speed Control Method for DC MotorsKarlo MabulacPas encore d'évaluation
- Development of An Independent Type of Hybrid Power Generation SystemDocument6 pagesDevelopment of An Independent Type of Hybrid Power Generation SystemUshma V PatelPas encore d'évaluation
- AGN 017 - Unbalanced Loads: Application Guidance Notes: Technical Information From Cummins Generator TechnologiesDocument8 pagesAGN 017 - Unbalanced Loads: Application Guidance Notes: Technical Information From Cummins Generator TechnologiesariwibowoPas encore d'évaluation
- Some Power Electronics Case Studies Using Matlab Simpowersystem BlocksetD'EverandSome Power Electronics Case Studies Using Matlab Simpowersystem BlocksetPas encore d'évaluation
- Influence of System Parameters Using Fuse Protection of Regenerative DC DrivesD'EverandInfluence of System Parameters Using Fuse Protection of Regenerative DC DrivesPas encore d'évaluation
- Power Factor Correction FormulaDocument1 pagePower Factor Correction FormulaDan GrayPas encore d'évaluation
- Power Factor Correction FormulaDocument1 pagePower Factor Correction FormulaDan GrayPas encore d'évaluation
- Power Factor Correction FormulaDocument1 pagePower Factor Correction FormulaDan GrayPas encore d'évaluation
- Synchronous Generator Supplying An Infinite Grid Objective SDocument4 pagesSynchronous Generator Supplying An Infinite Grid Objective SDan GrayPas encore d'évaluation
- ExcitationDocument4 pagesExcitationDan GrayPas encore d'évaluation
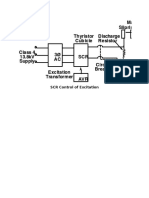
- SCR Control of ExcitationDocument1 pageSCR Control of ExcitationDan GrayPas encore d'évaluation
- SCR Control of ExcitationDocument1 pageSCR Control of ExcitationDan GrayPas encore d'évaluation
- SCR Control of ExcitationDocument1 pageSCR Control of ExcitationDan GrayPas encore d'évaluation
- SCR Control of ExcitationDocument1 pageSCR Control of ExcitationDan GrayPas encore d'évaluation
- ExcitationRDocument4 pagesExcitationRDan GrayPas encore d'évaluation
- ExcitationscktDocument4 pagesExcitationscktDan GrayPas encore d'évaluation
- ExcitationDocument4 pagesExcitationDan GrayPas encore d'évaluation
- OverfluxingDocument5 pagesOverfluxingDan GrayPas encore d'évaluation
- SynchDocument13 pagesSynchDan GrayPas encore d'évaluation
- ExcitationDocument4 pagesExcitationDan GrayPas encore d'évaluation
- Synchronous Generator Supplying An Infinite Grid Objective SDocument4 pagesSynchronous Generator Supplying An Infinite Grid Objective SDan GrayPas encore d'évaluation
- Synchronous Generator Supplying An Infinite Grid Objective SDocument4 pagesSynchronous Generator Supplying An Infinite Grid Objective SDan GrayPas encore d'évaluation
- SynchDocument13 pagesSynchDan GrayPas encore d'évaluation
- ExcitationDocument4 pagesExcitationDan GrayPas encore d'évaluation
- Honeywell IS2535 Install GuideDocument2 pagesHoneywell IS2535 Install GuideAlarm Grid Home Security and Alarm MonitoringPas encore d'évaluation
- Chapter 4 Energy ConversionDocument3 pagesChapter 4 Energy ConversionLuelsonCordovaDeclaradorPas encore d'évaluation
- SG16-3 MotoniveladoraDocument4 pagesSG16-3 MotoniveladoraLeandro DietrichPas encore d'évaluation
- Interrupt Service (Handling) MechanismDocument20 pagesInterrupt Service (Handling) MechanismManan MehtaPas encore d'évaluation
- Samsung Ue40f8000sl Ue46f8000sl Ue55f8000sl Ue65f8000sl Ue75f8000sl Chassis U90a PDFDocument77 pagesSamsung Ue40f8000sl Ue46f8000sl Ue55f8000sl Ue65f8000sl Ue75f8000sl Chassis U90a PDFSiengPas encore d'évaluation
- Lathe Default MMDocument5 pagesLathe Default MMMaqsood WarPas encore d'évaluation
- Module 3: Flip FlopsDocument34 pagesModule 3: Flip FlopsDevika UPas encore d'évaluation
- VisioProfessionalMastersList PDFDocument274 pagesVisioProfessionalMastersList PDFtedy susPas encore d'évaluation
- Tecumseh Model Lav35 40327k Parts ListDocument8 pagesTecumseh Model Lav35 40327k Parts ListTorney BenedictPas encore d'évaluation
- Yale Operation & Maintenance Rev1aDocument13 pagesYale Operation & Maintenance Rev1aAnonymous bHh1L1Pas encore d'évaluation
- Lighting and Appliance or Power PanelboardDocument2 pagesLighting and Appliance or Power Panelboardasi midobarPas encore d'évaluation
- Horizontal Multi-Stage Pumps: Component MaterialDocument2 pagesHorizontal Multi-Stage Pumps: Component MaterialBrayan CJPas encore d'évaluation
- Shoe Dryer Fyp DKM 07Document53 pagesShoe Dryer Fyp DKM 07Dasir Baluan AsiriPas encore d'évaluation
- Gas Material and ServicesDocument6 pagesGas Material and ServicesSachin SinghPas encore d'évaluation
- Motor Trifasico Ms6324 018kw TechtopDocument1 pageMotor Trifasico Ms6324 018kw TechtopVivianne catalina Muñoz roaPas encore d'évaluation
- Catalogo l375 20 So30002Document12 pagesCatalogo l375 20 So30002Alexis SanchezPas encore d'évaluation
- Terminations: Underground Electric Distribution StandardsDocument20 pagesTerminations: Underground Electric Distribution StandardsHendrix LevaPas encore d'évaluation
- SkyView HDX System Installation Manual Rev EDocument374 pagesSkyView HDX System Installation Manual Rev EIbnu SETYOBUDIPas encore d'évaluation
- The Perfect Tool To Expand Your Shop'S Tire Business!: Mdmax Tpms Diagnostic Tool Obdii Module For Maxtpms $447Document16 pagesThe Perfect Tool To Expand Your Shop'S Tire Business!: Mdmax Tpms Diagnostic Tool Obdii Module For Maxtpms $447Jamie MiddletonPas encore d'évaluation
- Simple MachincesDocument2 pagesSimple MachincesLEILANIE ABAD100% (1)
- As 60947.5.1-2004 Low-Voltage Switchgear and Controlgear Control Circuit Devices and Switching Elements - EleDocument10 pagesAs 60947.5.1-2004 Low-Voltage Switchgear and Controlgear Control Circuit Devices and Switching Elements - EleSAI Global - APACPas encore d'évaluation
- LH Door Trim Parts ListDocument1 pageLH Door Trim Parts ListNiten GuptaPas encore d'évaluation
- Board ListDocument5 pagesBoard ListParikshit KadamPas encore d'évaluation
- Catalogo Multi SplitsDocument37 pagesCatalogo Multi SplitsDarwin RojasPas encore d'évaluation