Vous aimerez peut-être aussi
- Estrategias de Control Avanzado 2007-I 1Document23 pagesEstrategias de Control Avanzado 2007-I 1Carlos Arturo Mayhua BernardoPas encore d'évaluation
- Curso de PLC - RefrigeracionDocument1 pageCurso de PLC - RefrigeracionCarlos Arturo Mayhua BernardoPas encore d'évaluation
- Charla SGA 033 Impactos en ElectrotecniaDocument1 pageCharla SGA 033 Impactos en ElectrotecniaCarlos Arturo Mayhua BernardoPas encore d'évaluation
- Ficha Técnica I-50 (Castellano)Document1 pageFicha Técnica I-50 (Castellano)Carlos Arturo Mayhua BernardoPas encore d'évaluation
- Bentonita para Sistema de TierrasDocument4 pagesBentonita para Sistema de Tierrasazulmarino123456Pas encore d'évaluation
- Catalogo de Informacion Tecnica Cables Autoportantes Baja Tension para Distribucion Aerea PDFDocument12 pagesCatalogo de Informacion Tecnica Cables Autoportantes Baja Tension para Distribucion Aerea PDFCarlos Arturo Mayhua Bernardo100% (1)
- Catalogo de Informacion Tecnica Cables Baja Tension PDFDocument29 pagesCatalogo de Informacion Tecnica Cables Baja Tension PDFCarlos Arturo Mayhua BernardoPas encore d'évaluation
- AISLADOR POLIMERICO ENDESA 24-36 KV + MONTAJESDocument6 pagesAISLADOR POLIMERICO ENDESA 24-36 KV + MONTAJESCarlos Arturo Mayhua BernardoPas encore d'évaluation
- MINERIADocument169 pagesMINERIACarlos Arturo Mayhua Bernardo100% (1)
- GEO - Manual de Energia de La BiomasaDocument8 pagesGEO - Manual de Energia de La BiomasaCarlos Arturo Mayhua BernardoPas encore d'évaluation
- Curso de Puestas A Tierra 1Document153 pagesCurso de Puestas A Tierra 1Carlos Arturo Mayhua Bernardo100% (2)
- CON EL TesterDocument52 pagesCON EL TesterJimmyPas encore d'évaluation
- Tutorial ProteusDocument22 pagesTutorial ProteusChema Juarez100% (1)
- Flowcode Arduino PDFDocument54 pagesFlowcode Arduino PDFchidomendezPas encore d'évaluation
- Resumen Red AzoguesDocument3 pagesResumen Red Azoguesmega235235Pas encore d'évaluation
- Practica No. 2.3Document5 pagesPractica No. 2.3Marce VillalpandoPas encore d'évaluation
- 211MC AgoDocument134 pages211MC AgoDiegoPas encore d'évaluation
- BiosDocument4 pagesBiosGüero TorresPas encore d'évaluation
- Circuitos Combinatorios ModularesDocument19 pagesCircuitos Combinatorios ModularesNicolas CastilloPas encore d'évaluation
- 4 Televisión Digital - Codificación AudiovisualDocument17 pages4 Televisión Digital - Codificación AudiovisualAndy PandaPas encore d'évaluation
- Instrumentacion IndustrialDocument13 pagesInstrumentacion Industrialjuli sanchezPas encore d'évaluation
- Anemo ZN DC116: EAN CODE: 3276007182255Document76 pagesAnemo ZN DC116: EAN CODE: 3276007182255Raul AlonsoPas encore d'évaluation
- Pets-Ant-Man-02 Mantenimiento Sub Estaciones MinaDocument3 pagesPets-Ant-Man-02 Mantenimiento Sub Estaciones MinaJersonPas encore d'évaluation
- Ensayo DE CBADocument10 pagesEnsayo DE CBANelly Cerna RiosPas encore d'évaluation
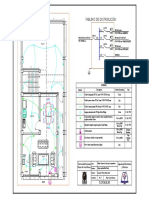
- Plano de Distribución - 1 NivelDocument1 pagePlano de Distribución - 1 NivelMax Fredi Quispe AguilarPas encore d'évaluation
- Computer Hoy - Curso Básico de InformáticaDocument117 pagesComputer Hoy - Curso Básico de InformáticaNereakoPas encore d'évaluation
- Manual Booq Avant EsDocument52 pagesManual Booq Avant EsNuria PinillaPas encore d'évaluation
- Práctica 6 Rectificación Trifásica ControladaDocument6 pagesPráctica 6 Rectificación Trifásica ControladaJohn M. Romero100% (1)
- Ficha Tecnica Toxirae Pro LelDocument2 pagesFicha Tecnica Toxirae Pro LelJunior TorrejónPas encore d'évaluation
- Sistema de Transmision de Datos Via Laser Como Solucion de Ultima Milla PDFDocument7 pagesSistema de Transmision de Datos Via Laser Como Solucion de Ultima Milla PDFCarlos Terraza OyagaPas encore d'évaluation
- Catálogo de Equipos de ComputoDocument33 pagesCatálogo de Equipos de ComputoMaría Camila MartínezPas encore d'évaluation
- Manual Avanzado DMC-FZ38 PDFDocument219 pagesManual Avanzado DMC-FZ38 PDFErmenguando Sousa Olivares100% (1)
- Manual Central de Incendios Sovica 4 Zonas C089Document4 pagesManual Central de Incendios Sovica 4 Zonas C089Edwir Ramos50% (4)
- Amplificacion y Limitacion de AltavocesDocument39 pagesAmplificacion y Limitacion de AltavocesMIGUEL AGUADO GUZMANPas encore d'évaluation
- UnadDocument14 pagesUnadFabian ZambranoPas encore d'évaluation
- Testo 816-1 PDFDocument2 pagesTesto 816-1 PDFronny25Pas encore d'évaluation
- Circuitos 1 Agustin Ruezga Garcia y MarioDocument12 pagesCircuitos 1 Agustin Ruezga Garcia y MarioAgustín Ruezga GarcíaPas encore d'évaluation
- Curso Simatic S7300 Parte I PDFDocument98 pagesCurso Simatic S7300 Parte I PDFingrid pereda100% (2)
- EYM - Práctica 2Document12 pagesEYM - Práctica 2Carlos SantanaPas encore d'évaluation
- Manual de Uso Básico de La Televisión Satelital v.5 PDFDocument7 pagesManual de Uso Básico de La Televisión Satelital v.5 PDFGrover Dueñas ArroyoPas encore d'évaluation
- Lab1 PDFDocument14 pagesLab1 PDFsaulPas encore d'évaluation
- 7 tendencias digitales que cambiarán el mundoD'Everand7 tendencias digitales que cambiarán el mundoÉvaluation : 4.5 sur 5 étoiles4.5/5 (87)
- Inteligencia artificial: Lo que usted necesita saber sobre el aprendizaje automático, robótica, aprendizaje profundo, Internet de las cosas, redes neuronales, y nuestro futuroD'EverandInteligencia artificial: Lo que usted necesita saber sobre el aprendizaje automático, robótica, aprendizaje profundo, Internet de las cosas, redes neuronales, y nuestro futuroÉvaluation : 4 sur 5 étoiles4/5 (1)
- Cultura y clima: fundamentos para el cambio en la organizaciónD'EverandCultura y clima: fundamentos para el cambio en la organizaciónPas encore d'évaluation
- Influencia. La psicología de la persuasiónD'EverandInfluencia. La psicología de la persuasiónÉvaluation : 4.5 sur 5 étoiles4.5/5 (14)
- Clics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaD'EverandClics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaÉvaluation : 4.5 sur 5 étoiles4.5/5 (117)
- Sistema de gestión lean para principiantes: Fundamentos del sistema de gestión lean para pequeñas y medianas empresas - con muchos ejemplos prácticosD'EverandSistema de gestión lean para principiantes: Fundamentos del sistema de gestión lean para pequeñas y medianas empresas - con muchos ejemplos prácticosÉvaluation : 4 sur 5 étoiles4/5 (16)
- Guía de aplicacion de la ISO 9001:2015D'EverandGuía de aplicacion de la ISO 9001:2015Évaluation : 5 sur 5 étoiles5/5 (3)
- Ciencia de datos: La serie de conocimientos esenciales de MIT PressD'EverandCiencia de datos: La serie de conocimientos esenciales de MIT PressÉvaluation : 5 sur 5 étoiles5/5 (1)
- Guía para la aplicación de ISO 9001 2015D'EverandGuía para la aplicación de ISO 9001 2015Évaluation : 4 sur 5 étoiles4/5 (1)
- Aprende a Modelar Aplicaciones con UML - Tercera EdiciónD'EverandAprende a Modelar Aplicaciones con UML - Tercera EdiciónÉvaluation : 2 sur 5 étoiles2/5 (1)
- Inteligencia artificial: Una exploración filosófica sobre el futuro de la mente y la concienciaD'EverandInteligencia artificial: Una exploración filosófica sobre el futuro de la mente y la concienciaAna Isabel Sánchez DíezÉvaluation : 4 sur 5 étoiles4/5 (3)
- Excel y SQL de la mano: Trabajo con bases de datos en Excel de forma eficienteD'EverandExcel y SQL de la mano: Trabajo con bases de datos en Excel de forma eficienteÉvaluation : 1 sur 5 étoiles1/5 (1)
- Conquista de las Redes Sociales: 201 Consejos para Marketeros y Emprendedores DigitalesD'EverandConquista de las Redes Sociales: 201 Consejos para Marketeros y Emprendedores DigitalesÉvaluation : 4.5 sur 5 étoiles4.5/5 (2)
- El trading de opciones de una forma sencilla: La guía introductoria al trading de opciones y a las principales estrategias de beneficios.D'EverandEl trading de opciones de una forma sencilla: La guía introductoria al trading de opciones y a las principales estrategias de beneficios.Évaluation : 5 sur 5 étoiles5/5 (1)
- EL PLAN DE MARKETING EN 4 PASOS. Estrategias y pasos clave para redactar un plan de marketing eficaz.D'EverandEL PLAN DE MARKETING EN 4 PASOS. Estrategias y pasos clave para redactar un plan de marketing eficaz.Évaluation : 4 sur 5 étoiles4/5 (51)