Vous aimerez peut-être aussi
- Direct Loop Gain and Bandwidth Measurement of Phase-Locked LoopDocument18 pagesDirect Loop Gain and Bandwidth Measurement of Phase-Locked LoopgezahegnPas encore d'évaluation
- Design and Analysis of Phase Locked Loop in 90mm CmosDocument7 pagesDesign and Analysis of Phase Locked Loop in 90mm CmosabhishekPas encore d'évaluation
- Phase-Locked Loops: A Control Centric Tutorial: Daniel AbramovitchDocument18 pagesPhase-Locked Loops: A Control Centric Tutorial: Daniel AbramovitchIon Mikel Onandia MartinezPas encore d'évaluation
- Understanding Phase-Locked Loops: Paul LutusDocument15 pagesUnderstanding Phase-Locked Loops: Paul LutusJosé PerezPas encore d'évaluation
- Phase Locked Loop System For FACTS: Dragan Jovcic, Member, IEEEDocument8 pagesPhase Locked Loop System For FACTS: Dragan Jovcic, Member, IEEEPakde ZoelfaPas encore d'évaluation
- Phase Locked Loop, PLL - TutorialDocument14 pagesPhase Locked Loop, PLL - TutorialJFJFERNANDEZPas encore d'évaluation
- 1.1 Background:-: Scoe Electronics & Telecommunication Engineering - 2009-2010Document20 pages1.1 Background:-: Scoe Electronics & Telecommunication Engineering - 2009-2010Pallavi DedgePas encore d'évaluation
- Application Note. PLL Jitter Measurements.: PurposeDocument34 pagesApplication Note. PLL Jitter Measurements.: PurposeAustin ShiPas encore d'évaluation
- PLL 2Document7 pagesPLL 2vermavikki97Pas encore d'évaluation
- Analysis and Software Implementation of A Robust Synchronizing PLL CircuitDocument19 pagesAnalysis and Software Implementation of A Robust Synchronizing PLL Circuitnarayan_aptePas encore d'évaluation
- PLL 5ed PDFDocument341 pagesPLL 5ed PDFadewale2001Pas encore d'évaluation
- PLL ExperimentDocument6 pagesPLL ExperimentkalscribPas encore d'évaluation
- PLL Intro 594a s05Document46 pagesPLL Intro 594a s05jaberyemeniPas encore d'évaluation
- Implementation of 2.4 GHZ Phase Locked Loop Using Sigma Delta ModulatorDocument6 pagesImplementation of 2.4 GHZ Phase Locked Loop Using Sigma Delta ModulatorInternational Journal of Application or Innovation in Engineering & ManagementPas encore d'évaluation
- Roll of Engineer FINAL2!3!13Document6 pagesRoll of Engineer FINAL2!3!13Mahendra S. PatilPas encore d'évaluation
- Design of PLL Using Cs Vco in 45nm TechnologyDocument7 pagesDesign of PLL Using Cs Vco in 45nm TechnologyJNR0% (1)
- Clear OnDocument6 pagesClear OnAbdalmoedAlaiashyPas encore d'évaluation
- The Costas Loop - An Introduction: by Eric HagemannDocument5 pagesThe Costas Loop - An Introduction: by Eric Hagemannm0hmdPas encore d'évaluation
- PLL Phase Locked LoopDocument13 pagesPLL Phase Locked LoopK JahnaviPas encore d'évaluation
- Jitter Suppression and PLL DesignDocument11 pagesJitter Suppression and PLL DesignClaudio FernandesPas encore d'évaluation
- NSC PLL Handbook DeansBook 4 01Document185 pagesNSC PLL Handbook DeansBook 4 01Muhammad IkhsanPas encore d'évaluation
- Feedbacksys 123Document16 pagesFeedbacksys 123Kimbeng FaithPas encore d'évaluation
- Razavi PLL TutorialDocument39 pagesRazavi PLL TutorialbsrathorPas encore d'évaluation
- Phase-Locked LoopDocument7 pagesPhase-Locked LoopTrinidad Méndez100% (3)
- PLL DeansBook Second EditionDocument185 pagesPLL DeansBook Second EditionJun HeoPas encore d'évaluation
- Phase-Locked Loop: Hrpota June 6, 2005Document9 pagesPhase-Locked Loop: Hrpota June 6, 2005Parameswararao BillaPas encore d'évaluation
- Tutorial On PLLs Part 1Document15 pagesTutorial On PLLs Part 1yashu_varsPas encore d'évaluation
- PLLSimDocument6 pagesPLLSimShamp2Pas encore d'évaluation
- Gardner Ieee Charge Pump PllsDocument10 pagesGardner Ieee Charge Pump PllsIban Barrutia InzaPas encore d'évaluation
- Phase Locked LoopDocument30 pagesPhase Locked Looprajendar shekhawat0% (1)
- Lab6 Phase Locked LoopsDocument20 pagesLab6 Phase Locked Loopsuitce2011Pas encore d'évaluation
- PLL 565Document6 pagesPLL 565Dinesh Kumar MehraPas encore d'évaluation
- Phase-Locked Loop Tutorial, PLLDocument12 pagesPhase-Locked Loop Tutorial, PLLKarthik MurthyPas encore d'évaluation
- FFT Analysis, Simulation of Computational Model and Netlist Model of Digital Phase Locked LoopDocument16 pagesFFT Analysis, Simulation of Computational Model and Netlist Model of Digital Phase Locked LoopIJSTEPas encore d'évaluation
- 1972 Signetics PLL Applications PDFDocument82 pages1972 Signetics PLL Applications PDFsunilsheelavantPas encore d'évaluation
- College Format DocumentDocument74 pagesCollege Format DocumentRatnakarVarunPas encore d'évaluation
- Design of Charge Pump PLLDocument5 pagesDesign of Charge Pump PLLSwati KashtPas encore d'évaluation
- What Exactly Is A PLL?: by Tony Van Roon (VA3AVR)Document10 pagesWhat Exactly Is A PLL?: by Tony Van Roon (VA3AVR)ofir485Pas encore d'évaluation
- Hybrid SyntehsizerDocument5 pagesHybrid Syntehsizervisava789Pas encore d'évaluation
- PLL DesignDocument6 pagesPLL DesignMohamedElsawiPas encore d'évaluation
- Experiment 8: FM DemodulatorDocument20 pagesExperiment 8: FM Demodulatorslay17Pas encore d'évaluation
- PLL Tracking Performance in The Presence of Oscillator Phase NoiseDocument28 pagesPLL Tracking Performance in The Presence of Oscillator Phase Noiseاحمد نديم اسماعيلPas encore d'évaluation
- Filtering For Distance RelaysDocument9 pagesFiltering For Distance Relayssirisiri100Pas encore d'évaluation
- Analog Electronics: Circuits, Systems and Signal ProcessingD'EverandAnalog Electronics: Circuits, Systems and Signal ProcessingPas encore d'évaluation
- Analysis and Design of Multicell DC/DC Converters Using Vectorized ModelsD'EverandAnalysis and Design of Multicell DC/DC Converters Using Vectorized ModelsPas encore d'évaluation
- How PLL Performance Affect Wireless SystemsDocument10 pagesHow PLL Performance Affect Wireless SystemsbaymanPas encore d'évaluation
- Phase-Locked Loop: Budapest University of Technology and Economics Laboratory 2 - Experiment 9Document40 pagesPhase-Locked Loop: Budapest University of Technology and Economics Laboratory 2 - Experiment 9Supriya AggarwalPas encore d'évaluation
- Jimenez AbetDocument1 pageJimenez AbetAxel JiménezPas encore d'évaluation
- An-0046 - PLL IC As Comm System Building BlockDocument14 pagesAn-0046 - PLL IC As Comm System Building BlockNitin SoniPas encore d'évaluation
- AC Lab8 Assignment 20BEC022Document5 pagesAC Lab8 Assignment 20BEC022Himanshu RaiPas encore d'évaluation
- A Novel Non-Linear Transient Analysis For Phase-Locked Loop DesignDocument8 pagesA Novel Non-Linear Transient Analysis For Phase-Locked Loop DesignerpublicationPas encore d'évaluation
- Synthesis of NetworksDocument50 pagesSynthesis of NetworksJosetheking CrackedsoftwaresPas encore d'évaluation
- Multipass Ring Oscillator Based Dual Loop PLL For High Frequency SynthesizersDocument7 pagesMultipass Ring Oscillator Based Dual Loop PLL For High Frequency SynthesizersInternational Journal of Application or Innovation in Engineering & ManagementPas encore d'évaluation
- PLL WikipediaDocument8 pagesPLL WikipediaMonika SharmaPas encore d'évaluation
- Phase Interpolating CircuitsDocument21 pagesPhase Interpolating Circuitsreader_188Pas encore d'évaluation
- PLL Frequency Synthesizer TutorialDocument32 pagesPLL Frequency Synthesizer TutorialQuốc Sự NguyễnPas encore d'évaluation
- Phase Locked Loop Design FundamentalsDocument22 pagesPhase Locked Loop Design Fundamentalsptt3iPas encore d'évaluation
- Phase Locked LoopsDocument5 pagesPhase Locked LoopsSantanu GayenPas encore d'évaluation
- Learning PlatformDocument9 pagesLearning PlatformrocaoPas encore d'évaluation
- YG 2nd To 3rd GradeDocument147 pagesYG 2nd To 3rd GraderocaoPas encore d'évaluation
- PID1Document9 pagesPID1rocaoPas encore d'évaluation
- 598887main Auburn PowerPoints SE PDFDocument35 pages598887main Auburn PowerPoints SE PDFrocaoPas encore d'évaluation
- Bode PlotDocument4 pagesBode PlotrocaoPas encore d'évaluation
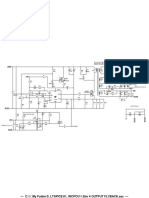
- C:/1. My Folder/9. LTSPICE/01. RICPCU/1.Sim 4 OUTPUT FLYBACK - AscDocument1 pageC:/1. My Folder/9. LTSPICE/01. RICPCU/1.Sim 4 OUTPUT FLYBACK - AscrocaoPas encore d'évaluation
- Learning PlatformDocument12 pagesLearning PlatformrocaoPas encore d'évaluation
- Learning PlatformDocument12 pagesLearning PlatformrocaoPas encore d'évaluation
- L-9 (DK) (Pe) ( (Ee) Nptel)Document36 pagesL-9 (DK) (Pe) ( (Ee) Nptel)Htet AungPas encore d'évaluation
- 07309097Document10 pages07309097rocaoPas encore d'évaluation
- Tap ChangerDocument14 pagesTap ChangerrocaoPas encore d'évaluation
- ObsCPMT PDFDocument14 pagesObsCPMT PDFrocaoPas encore d'évaluation
- FAM3 1 McEachern 61000 4 30 StandardXDocument12 pagesFAM3 1 McEachern 61000 4 30 StandardXWillian XavierPas encore d'évaluation
- Tap ChangerDocument14 pagesTap ChangerrocaoPas encore d'évaluation
- Chapter 17oldDocument32 pagesChapter 17oldFahad RashidPas encore d'évaluation
- Analysis of Modulation Strategies For Two-Stage Interleaved Voltage Source Inverter Employed For PV ApplicationsDocument12 pagesAnalysis of Modulation Strategies For Two-Stage Interleaved Voltage Source Inverter Employed For PV ApplicationsIJARBESTPas encore d'évaluation
- 50 60hz Inductor DesignDocument5 pages50 60hz Inductor DesignrocaoPas encore d'évaluation
- Nylon 66Document3 pagesNylon 66rocaoPas encore d'évaluation
- FR530Document7 pagesFR530rocaoPas encore d'évaluation
- Core LossesDocument3 pagesCore Lossesgatoskylo2000Pas encore d'évaluation
- De BouncingDocument2 pagesDe BouncingrocaoPas encore d'évaluation
- A 55 KW Three-Phase Inverter With Si Igbts and Sic Schottky DiodesDocument7 pagesA 55 KW Three-Phase Inverter With Si Igbts and Sic Schottky DiodesrocaoPas encore d'évaluation
- 3379 8107 2 PBDocument8 pages3379 8107 2 PBrocaoPas encore d'évaluation
- Magetic Design For InverterDocument2 pagesMagetic Design For InverterrocaoPas encore d'évaluation
- DSP DS1104 Electric Drives - LabDocument2 pagesDSP DS1104 Electric Drives - LabrocaoPas encore d'évaluation
- DSP DS1104 Electric Drives - LabDocument2 pagesDSP DS1104 Electric Drives - LabrocaoPas encore d'évaluation
- AN604 Application Note: Calculation of Conduction Losses in A Power RectifierDocument12 pagesAN604 Application Note: Calculation of Conduction Losses in A Power RectifierrocaoPas encore d'évaluation
- Loss Power of Abb Igbts - 5sya 2053-04Document6 pagesLoss Power of Abb Igbts - 5sya 2053-04rocaoPas encore d'évaluation
- Applying IGBTs - 5SYA 2053-04 PDFDocument22 pagesApplying IGBTs - 5SYA 2053-04 PDFbacuoc.nguyen356Pas encore d'évaluation
- Lcnews227 - Nexera SeriesDocument47 pagesLcnews227 - Nexera SeriesMuhammad RohmanPas encore d'évaluation
- Leaflet CycleManager Ep CycleManager ErDocument7 pagesLeaflet CycleManager Ep CycleManager ErValeska ArdilesPas encore d'évaluation
- Komatsu Technical BrochurDocument7 pagesKomatsu Technical BrochurBenjamin MossoPas encore d'évaluation
- Present Arlypon VPCDocument1 pagePresent Arlypon VPCErcan Ateş100% (1)
- Sotero 05activity EnvironmetnDocument3 pagesSotero 05activity Environmetnbernadette soteroPas encore d'évaluation
- Column c4 From 3rd FloorDocument1 pageColumn c4 From 3rd Floor1man1bookPas encore d'évaluation
- Monthly Exam Part I Aurora English Course 1 (KD 1, KD2, PKD3)Document20 pagesMonthly Exam Part I Aurora English Course 1 (KD 1, KD2, PKD3)winda septiaraPas encore d'évaluation
- Deld12070 CC18 GT 371 C CDocument1 pageDeld12070 CC18 GT 371 C CDEBASIS BARMANPas encore d'évaluation
- AdPoe The Hunting of The HareDocument2 pagesAdPoe The Hunting of The HarePI CubingPas encore d'évaluation
- TOP233YDocument24 pagesTOP233YJose BenavidesPas encore d'évaluation
- Flash Memoir RevisedDocument3 pagesFlash Memoir Revisedapi-511179803Pas encore d'évaluation
- Yamaha r6 Yec Kit ManualDocument2 pagesYamaha r6 Yec Kit ManualAlexander0% (1)
- Cold N Brew MenuDocument3 pagesCold N Brew MenuRizki FitriaPas encore d'évaluation
- Laporan Pelayanan Rawat Jalan Tingkat Pertama (RJTP)Document10 pagesLaporan Pelayanan Rawat Jalan Tingkat Pertama (RJTP)dede komalasariPas encore d'évaluation
- RA9275Document49 pagesRA9275znarf_ryanPas encore d'évaluation
- Into The Unknown 21 Doc PDFDocument9 pagesInto The Unknown 21 Doc PDFFernando AlbuquerquePas encore d'évaluation
- TA1515VDocument4 pagesTA1515VLeo LeiPas encore d'évaluation
- 5 Years High and Low PointsDocument7 pages5 Years High and Low PointsNaresh Kumar VishwakarmaPas encore d'évaluation
- Panasonic Refrigeraor NR-B472TZ - B412TZ v1.1Document24 pagesPanasonic Refrigeraor NR-B472TZ - B412TZ v1.1Anonymous 2iQ1B59Pas encore d'évaluation
- Monk - Way of The Elements RevisedDocument3 pagesMonk - Way of The Elements Revisedluigipokeboy0% (1)
- High Performance Dialysis GuideDocument28 pagesHigh Performance Dialysis GuideRoxana ElenaPas encore d'évaluation
- What's The Use of Neuroticism?: G. Claridge, C. DavisDocument18 pagesWhat's The Use of Neuroticism?: G. Claridge, C. DavisNimic NimicPas encore d'évaluation
- PalmistryDocument116 pagesPalmistrymarinoyogaPas encore d'évaluation
- 173 EvidenceDocument6 pages173 EvidenceSantiago RubianoPas encore d'évaluation
- Master of Business Administration in Aviation Management MbaamDocument10 pagesMaster of Business Administration in Aviation Management MbaamAdebayo KehindePas encore d'évaluation
- Art and Geography: Patterns in The HimalayaDocument30 pagesArt and Geography: Patterns in The HimalayaBen WilliamsPas encore d'évaluation
- Case-Study - Decision Making Under UncertaintyDocument21 pagesCase-Study - Decision Making Under UncertaintyMari GhviniashviliPas encore d'évaluation
- English 8 - B TR Và Nâng CaoDocument150 pagesEnglish 8 - B TR Và Nâng CaohhPas encore d'évaluation
- Mathematics For Engineers and Scientists 3 PDFDocument89 pagesMathematics For Engineers and Scientists 3 PDFShailin SequeiraPas encore d'évaluation
- Fantasy AGE - Spell SheetDocument2 pagesFantasy AGE - Spell SheetpacalypsePas encore d'évaluation