Vous aimerez peut-être aussi
- Uniformance Process Studio PINDocument4 pagesUniformance Process Studio PINM Sigit A MaskarebetPas encore d'évaluation
- Guiding Principle: Working Over, On or Near WaterDocument12 pagesGuiding Principle: Working Over, On or Near WaterMogodan GabrielPas encore d'évaluation
- Asme B31 - Pressure PipingDocument3 pagesAsme B31 - Pressure PipingAndhyka Cakrabuana AdhitamaPas encore d'évaluation
- Simulators For Risk AssessmentDocument20 pagesSimulators For Risk Assessmentajrojas1359100% (1)
- Job Description: Senior OperatorDocument3 pagesJob Description: Senior OperatorhamdibouhajarPas encore d'évaluation
- Liquid Cylinder Manual Cryo-DuraCyl (Contoh Tabung)Document70 pagesLiquid Cylinder Manual Cryo-DuraCyl (Contoh Tabung)Achmadda FebiyonoPas encore d'évaluation
- Nigeria Factories Act, 1987Document56 pagesNigeria Factories Act, 1987Ethelbert AkwuruahaPas encore d'évaluation
- Gas Condensate Reservoir Analysis TechniqueDocument2 pagesGas Condensate Reservoir Analysis TechniqueHitesh Mittal100% (1)
- Objective Question of RefineryDocument11 pagesObjective Question of Refineryvishal bailurPas encore d'évaluation
- Thermodynamics Workshop Problems Model Answers 2010-2011 1Document9 pagesThermodynamics Workshop Problems Model Answers 2010-2011 1djsmilie77Pas encore d'évaluation
- API Inspector Training ApplicationDocument13 pagesAPI Inspector Training ApplicationMalik Uzair ZafarPas encore d'évaluation
- Tanker LCC Operating ProceduresDocument37 pagesTanker LCC Operating ProceduresCiocio CiohodaruPas encore d'évaluation
- P RefStd - 4043 - 004 - v091130 - EN - LOPADocument9 pagesP RefStd - 4043 - 004 - v091130 - EN - LOPAlucianduPas encore d'évaluation
- (TP0A004) Accuracy of Metering Versus Tank Gauging of Vessel Delivered Petroleum LiquidsDocument4 pages(TP0A004) Accuracy of Metering Versus Tank Gauging of Vessel Delivered Petroleum LiquidsRoberto Carlos TeixeiraPas encore d'évaluation
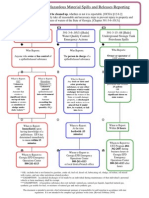
- Georgia Spill Release Reporting FlowchartDocument1 pageGeorgia Spill Release Reporting FlowchartfwePas encore d'évaluation
- Flash Skim Vessel Descr.Document5 pagesFlash Skim Vessel Descr.vanashley1Pas encore d'évaluation
- HSSE Alert - BP Refinery Explosion Incident - March 23rdDocument4 pagesHSSE Alert - BP Refinery Explosion Incident - March 23rdOsedebamen Irabor100% (1)
- An Overview of Pressure Relief DevicesDocument36 pagesAn Overview of Pressure Relief DevicesAkash Palkar100% (1)
- AACHC Emergency Shutdown Procedures Template 4-25-14Document9 pagesAACHC Emergency Shutdown Procedures Template 4-25-14bertan dağıstanlıPas encore d'évaluation
- Acetone MSDSDocument9 pagesAcetone MSDSCeline TheePas encore d'évaluation
- FM200 KiddeDocument37 pagesFM200 KiddeNguyen Van TuanPas encore d'évaluation
- Compression and Condensation of Carbon DioxideDocument11 pagesCompression and Condensation of Carbon DioxideNguyen Dang Hanh100% (3)
- Chlorine CylinderDocument9 pagesChlorine Cylinderjoseph_mscPas encore d'évaluation
- Vessesl and TanksDocument20 pagesVessesl and TanksJan JarePas encore d'évaluation
- Introduction To Computational Fluid Dynamics - Webinar: Questions and AnswersDocument19 pagesIntroduction To Computational Fluid Dynamics - Webinar: Questions and AnswersMohamed SarmoukPas encore d'évaluation
- Hydrostatic Test ProcedureDocument7 pagesHydrostatic Test Procedurelaleye_olumidePas encore d'évaluation
- Pressure Systems - Safety and YouDocument8 pagesPressure Systems - Safety and YouadammzjinPas encore d'évaluation
- Hydro-Cyclone Separation Unit: Cost EstimationsDocument20 pagesHydro-Cyclone Separation Unit: Cost EstimationsMuhammad Hussain BilalPas encore d'évaluation
- Compressibility For Non Ideal GasesDocument3 pagesCompressibility For Non Ideal Gasescymy100% (1)
- PSM Best Practices Workshop - Pre-Startup Safety Review PresentationDocument15 pagesPSM Best Practices Workshop - Pre-Startup Safety Review PresentationRod Lafrades100% (1)
- Chevron EverythingYouNeedToKnowAboutFuels v3 1a DESKTOPDocument32 pagesChevron EverythingYouNeedToKnowAboutFuels v3 1a DESKTOPNamal FernandoPas encore d'évaluation
- Flaring and Venting Reduction Guideline (October Release)Document71 pagesFlaring and Venting Reduction Guideline (October Release)Behnam HosseinzadehPas encore d'évaluation
- Price List For WIKA PDFDocument110 pagesPrice List For WIKA PDFBrijesh Sharma100% (1)
- Calibrate Provers ConfidentlyDocument2 pagesCalibrate Provers Confidentlyjohnloops100% (1)
- Integrity Testing of Aboveground Storage TanksDocument43 pagesIntegrity Testing of Aboveground Storage TanksMakhfud Edy100% (1)
- Materials Selection in Oil and Gas-An OverviewDocument15 pagesMaterials Selection in Oil and Gas-An OverviewAli AliPas encore d'évaluation
- BakerHughes BN ReciprocatingCompressorsMonitoring Brochure-Web-NA-1112...Document9 pagesBakerHughes BN ReciprocatingCompressorsMonitoring Brochure-Web-NA-1112...Abbas AlnajjarPas encore d'évaluation
- FlareDocument39 pagesFlareMuhammad Tahir RazaPas encore d'évaluation
- Guidelines For Corrosion Protetion and Coating Systems WWW - Gl-Group - Com Infoservices Rules Pdfs GL Vi-10-2 eDocument42 pagesGuidelines For Corrosion Protetion and Coating Systems WWW - Gl-Group - Com Infoservices Rules Pdfs GL Vi-10-2 ewilfran villegas100% (1)
- CRP Sampling Literature PDFDocument8 pagesCRP Sampling Literature PDFgullenariPas encore d'évaluation
- Types and Functions - Design Considerations - Sizing Criteria - Calculation Method - Specification Data SheetDocument21 pagesTypes and Functions - Design Considerations - Sizing Criteria - Calculation Method - Specification Data Sheet3668770Pas encore d'évaluation
- Suvidya Institute Piping Engineering TrainingDocument2 pagesSuvidya Institute Piping Engineering TrainingMohammedBujairPas encore d'évaluation
- 11 - ENGINEERING - DESIGN - GUIDELINE - Separator Vessel - REV01Document28 pages11 - ENGINEERING - DESIGN - GUIDELINE - Separator Vessel - REV01Nadine MohamedPas encore d'évaluation
- Risk Assessment Tank FarmDocument57 pagesRisk Assessment Tank FarmAwolayeofori TamunosakiPas encore d'évaluation
- The Use of Hazop Techniques in Applied Hazard ProcessesDocument72 pagesThe Use of Hazop Techniques in Applied Hazard Processesamidi5555913Pas encore d'évaluation
- Removing Steryl Glucosides in Palm Oil-Based BiodieselDocument7 pagesRemoving Steryl Glucosides in Palm Oil-Based BiodieselNestor Armando Marin Solano100% (1)
- Condensate ReturnDocument24 pagesCondensate Returnwaheed2286Pas encore d'évaluation
- PSV Test Risk AssessmentDocument44 pagesPSV Test Risk AssessmentAlabandi DodshPas encore d'évaluation
- Pumps - Centrifugal vs. Positive Displacement: Instructor: Edward P. Brunet, JR., PEDocument11 pagesPumps - Centrifugal vs. Positive Displacement: Instructor: Edward P. Brunet, JR., PEyogachemPas encore d'évaluation
- PIPING PLAN SUMMARYDocument9 pagesPIPING PLAN SUMMARYMohit MundraPas encore d'évaluation
- How Corrosion Happens in Oil and Gas IndustryDocument6 pagesHow Corrosion Happens in Oil and Gas Industrysurekha surekhaPas encore d'évaluation
- Inspection On EconomiserDocument2 pagesInspection On Economiserkrishna0% (1)
- Desalter Emulsion MonitorDocument2 pagesDesalter Emulsion MonitorAbdus Saboor KhalidPas encore d'évaluation
- Commissioning Process Plant ModelDocument21 pagesCommissioning Process Plant ModelLuis EnriquePas encore d'évaluation
- Refrigeration PrinciplesDocument20 pagesRefrigeration PrinciplesAADIL AHMED APas encore d'évaluation
- 7.2.24 - Breather ValvesDocument28 pages7.2.24 - Breather Valvessav33Pas encore d'évaluation
- Chemical Process Retrofitting and Revamping: Techniques and ApplicationsD'EverandChemical Process Retrofitting and Revamping: Techniques and ApplicationsGade Pandu RangaiahPas encore d'évaluation
- Control Systems CH1Document12 pagesControl Systems CH1kkefeingePas encore d'évaluation
- Effect Relationship For TheDocument5 pagesEffect Relationship For TheByron MawoyoPas encore d'évaluation
- Introduction to Automatic Control SystemsDocument4 pagesIntroduction to Automatic Control SystemsmornyPas encore d'évaluation
- Preboard Answer Key 1 PDFDocument11 pagesPreboard Answer Key 1 PDFAnonymous 0zrCNQPas encore d'évaluation
- ECPay Collection Partners in Abra, Agusan del Norte, Agusan del Sur, Aklan, Albay and AntiqueDocument22 pagesECPay Collection Partners in Abra, Agusan del Norte, Agusan del Sur, Aklan, Albay and AntiqueDoc Prince CaballeroPas encore d'évaluation
- Waste Water Treatment Flow DiagramDocument4 pagesWaste Water Treatment Flow DiagramAnonymous 0zrCNQPas encore d'évaluation
- SCC Innovasia FinalDocument16 pagesSCC Innovasia FinalAnonymous 0zrCNQPas encore d'évaluation
- Gas Absorber CalculationsDocument5 pagesGas Absorber CalculationsAnonymous 0zrCNQPas encore d'évaluation
- Olefins Production PDFDocument64 pagesOlefins Production PDFAnonymous 0zrCNQPas encore d'évaluation
- Riveting Procedure: Riveted Pressure VesselsDocument3 pagesRiveting Procedure: Riveted Pressure VesselsAnonymous 0zrCNQPas encore d'évaluation
- Profile2008 2009 PDFDocument18 pagesProfile2008 2009 PDFAnonymous 0zrCNQPas encore d'évaluation
- Linde FinalDocument6 pagesLinde FinalAnonymous 0zrCNQPas encore d'évaluation
- Electronic Structure and Covalent Bonding: Essentials of Organic Chemistry (Bruice)Document33 pagesElectronic Structure and Covalent Bonding: Essentials of Organic Chemistry (Bruice)tyron9520Pas encore d'évaluation
- Controller TuningDocument4 pagesController TuningAnonymous 0zrCNQPas encore d'évaluation
- Data Analysis-Pivot TableDocument168 pagesData Analysis-Pivot TableAnonymous 0zrCNQPas encore d'évaluation
- Christmas SongsDocument7 pagesChristmas SongsAnonymous 0zrCNQ0% (1)
- EthicsDocument5 pagesEthicsAnonymous 0zrCNQPas encore d'évaluation
- MathDocument18 pagesMathAnonymous 0zrCNQPas encore d'évaluation
- Design, Construction and Operation Details-Biomass BriquettiDocument40 pagesDesign, Construction and Operation Details-Biomass BriquettiSamanway DasPas encore d'évaluation
- Ethics NotesDocument5 pagesEthics NotesAnonymous 0zrCNQPas encore d'évaluation
- Che Corse: How To Sell OneselfDocument1 pageChe Corse: How To Sell OneselfAnonymous 0zrCNQPas encore d'évaluation
- Union Galva Steel FinalDocument11 pagesUnion Galva Steel FinalAnonymous 0zrCNQPas encore d'évaluation
- Breach of ObligationsDocument7 pagesBreach of ObligationsAnonymous 0zrCNQPas encore d'évaluation
- Profile2008 2009 PDFDocument18 pagesProfile2008 2009 PDFAnonymous 0zrCNQPas encore d'évaluation
- Che Corse: Employment CoachingDocument1 pageChe Corse: Employment CoachingAnonymous 0zrCNQPas encore d'évaluation
- Philippine Water Supply Sector Roadmap 2nd EditionDocument150 pagesPhilippine Water Supply Sector Roadmap 2nd Editionybbob_11100% (1)
- Balita 3rd QTR 2013Document8 pagesBalita 3rd QTR 2013Anonymous 0zrCNQPas encore d'évaluation
- SCC Innovasia FinalDocument16 pagesSCC Innovasia FinalAnonymous 0zrCNQPas encore d'évaluation
- Overview of Shielding Gases 60734 1217 82202 PDFDocument12 pagesOverview of Shielding Gases 60734 1217 82202 PDFAnonymous 0zrCNQPas encore d'évaluation
- Davies Paints Philippines FINALDocument5 pagesDavies Paints Philippines FINALAnonymous 0zrCNQPas encore d'évaluation
- StoichiometryDocument20 pagesStoichiometryDanang Satriya PutraPas encore d'évaluation
- Precipitation GravimetryDocument15 pagesPrecipitation GravimetryAnonymous 0zrCNQ100% (2)
- AD and DA ConversionDocument15 pagesAD and DA ConversionmumamaduraiPas encore d'évaluation
- EEE I & IV Year R09Document107 pagesEEE I & IV Year R09Sravan GuptaPas encore d'évaluation
- SQL Queries - Best PracticesDocument3 pagesSQL Queries - Best PracticesvishnuselvaPas encore d'évaluation
- Eric Herrmann ResumeDocument1 pageEric Herrmann Resumeapi-237754499Pas encore d'évaluation
- Vlastakis ScienceDocument4 pagesVlastakis ScienceAnonymous 4O5p5xK2OBPas encore d'évaluation
- Geometry m5 Topic A Lesson 1 TeacherDocument12 pagesGeometry m5 Topic A Lesson 1 TeacherGina CasinilloPas encore d'évaluation
- NDA Solved Paper 2016Document36 pagesNDA Solved Paper 2016rishiPas encore d'évaluation
- Computer Oriented Statistical MethodsDocument3 pagesComputer Oriented Statistical Methodschetanking4033% (3)
- Classification of Control SystemsDocument15 pagesClassification of Control SystemsMohankumar V.Pas encore d'évaluation
- Math5 Q4 SUMMATIVE TESTS 1 2Document4 pagesMath5 Q4 SUMMATIVE TESTS 1 2John David JuavePas encore d'évaluation
- TQM-important QuestionsDocument5 pagesTQM-important QuestionsSridhar Atla100% (1)
- Grade DescriptorsDocument2 pagesGrade DescriptorsMoloy GoraiPas encore d'évaluation
- MSIP Period Maps Tool 200901Document8 pagesMSIP Period Maps Tool 200901Kenny CasillaPas encore d'évaluation
- Board of The Foundation of The Scandinavian Journal of StatisticsDocument7 pagesBoard of The Foundation of The Scandinavian Journal of StatisticslacisagPas encore d'évaluation
- Comparison of Direct and Indirect Assessments of Temperature Effects and Interface Shear Strength Between Sand and HDPE GeomembranesDocument10 pagesComparison of Direct and Indirect Assessments of Temperature Effects and Interface Shear Strength Between Sand and HDPE GeomembranesJustin MillerPas encore d'évaluation
- Litpack ManuelDocument66 pagesLitpack ManuelMoussaab BerkaniPas encore d'évaluation
- Radiation Heat Transfer Lab SessionDocument5 pagesRadiation Heat Transfer Lab SessionusamaPas encore d'évaluation
- ch11 PDFDocument4 pagesch11 PDFAniket GaikwadPas encore d'évaluation
- Precalculus Prerequisites A.K.A. Chapter 0' Creative Commons Attribution-Noncommercial-Sharealike 3.0 LicenseDocument16 pagesPrecalculus Prerequisites A.K.A. Chapter 0' Creative Commons Attribution-Noncommercial-Sharealike 3.0 LicensejakePas encore d'évaluation
- Chapter 3Document34 pagesChapter 3Alazar GetachewPas encore d'évaluation
- 2D Transformations in Computer GraphicsDocument32 pages2D Transformations in Computer GraphicsIAGPLSPas encore d'évaluation
- Newton Raphson Method Example-2 F (X) 2x 3-2x-5Document3 pagesNewton Raphson Method Example-2 F (X) 2x 3-2x-5Rashid Abu abdoonPas encore d'évaluation
- OOP Lab#8: Pointers and InheritanceDocument5 pagesOOP Lab#8: Pointers and InheritanceKhalid AkramPas encore d'évaluation
- Research MethodologyDocument70 pagesResearch MethodologyRagavi R100% (1)
- DLL Mathematics 5 q2 w2Document7 pagesDLL Mathematics 5 q2 w2YolydeBelenPas encore d'évaluation
- Librecad Users Extensive Manual: 1.1 Documents Purpose and CreditsDocument77 pagesLibrecad Users Extensive Manual: 1.1 Documents Purpose and CreditsAhmad Arif SaktiPas encore d'évaluation
- Absolute and Comparative AdvantageDocument9 pagesAbsolute and Comparative AdvantageRara AlonzoPas encore d'évaluation
- Biomechanics of HipDocument6 pagesBiomechanics of HipChristina SuppiahPas encore d'évaluation
- Pert CPMDocument42 pagesPert CPMNaveed Iqbal Salman86% (7)