Vous aimerez peut-être aussi
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- Taylor Bitcoin IEEE Computer 2017Document43 pagesTaylor Bitcoin IEEE Computer 2017Jaime BonillaPas encore d'évaluation
- EN - Bulwark Cryptocurrency Whitepaper PDFDocument27 pagesEN - Bulwark Cryptocurrency Whitepaper PDFJaime BonillaPas encore d'évaluation
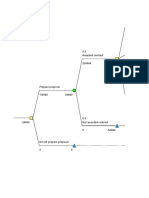
- TreePlan 204 Example MacDocument40 pagesTreePlan 204 Example MacRonal AlmestarPas encore d'évaluation
- Through The Ages - Reglas PDFDocument12 pagesThrough The Ages - Reglas PDFJaime BonillaPas encore d'évaluation
- Taylor Bitcoin IEEE Computer 2017Document9 pagesTaylor Bitcoin IEEE Computer 2017laserPas encore d'évaluation
- Taylor Bitcoin IEEE Computer 2017Document9 pagesTaylor Bitcoin IEEE Computer 2017laserPas encore d'évaluation
- Iportant I SimoDocument15 pagesIportant I SimoJaime BonillaPas encore d'évaluation
- 8B1Document50 pages8B1Jaime BonillaPas encore d'évaluation
- Read MeDocument1 pageRead MePaula AranhaPas encore d'évaluation
- Mi Canciocit JijiDocument1 pageMi Canciocit JijiJaime BonillaPas encore d'évaluation
- Niwali Programmer Test: The Country. The Color of The Price of The Chosen Product Must Change or HighlightDocument1 pageNiwali Programmer Test: The Country. The Color of The Price of The Chosen Product Must Change or HighlightJaime BonillaPas encore d'évaluation
- CuartilloDocument2 pagesCuartilloJaime BonillaPas encore d'évaluation
- Try This For Sighs en Tu MóvilDocument1 pageTry This For Sighs en Tu MóvilJaime BonillaPas encore d'évaluation
- Text 2Document1 pageText 2Jaime BonillaPas encore d'évaluation
- Acceleo 2.6 User GuideDocument79 pagesAcceleo 2.6 User GuideJaime BonillaPas encore d'évaluation
- RedDocument1 pageRedJaime BonillaPas encore d'évaluation
- Try This For Sighs en Tu MóvilDocument1 pageTry This For Sighs en Tu MóvilJaime BonillaPas encore d'évaluation
- SVM 1Document91 pagesSVM 1Jaime BonillaPas encore d'évaluation
- Sim ADocument1 pageSim AJaime BonillaPas encore d'évaluation
- Try This For Sighs en Tu MóvilDocument1 pageTry This For Sighs en Tu MóvilJaime BonillaPas encore d'évaluation
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Engineering Mathematics-Iv: This Course Will Enable Students ToDocument28 pagesEngineering Mathematics-Iv: This Course Will Enable Students ToPradeep DeshpandePas encore d'évaluation
- Newman - The Structure and Function of Complex NetworksDocument90 pagesNewman - The Structure and Function of Complex NetworksmaniataicaPas encore d'évaluation
- Graph Theory 4 - Vertex Degree and Regular Graphs NotesDocument3 pagesGraph Theory 4 - Vertex Degree and Regular Graphs NotesQuincy SproulPas encore d'évaluation
- Lecture6 Bellman Ford ExampleDocument15 pagesLecture6 Bellman Ford ExampleIshfaq HussainPas encore d'évaluation
- w5 Graph ColoringDocument12 pagesw5 Graph ColoringsubbareddymeruvaPas encore d'évaluation
- Prims and Kruskal's Algorithm ProblemDocument13 pagesPrims and Kruskal's Algorithm ProblemGunjanPas encore d'évaluation
- Algorithms-Practical For Pattern Matching-Brute ForceDocument4 pagesAlgorithms-Practical For Pattern Matching-Brute ForceYaseen ShPas encore d'évaluation
- Degree of Diffusion in Real Complex NetworksDocument12 pagesDegree of Diffusion in Real Complex NetworksICDIPC2014Pas encore d'évaluation
- CXS Model SelectionDocument1 pageCXS Model SelectionvenkatselvakumarPas encore d'évaluation
- CS210 Lecture 32 Magical Application Binary Tree IIIDocument38 pagesCS210 Lecture 32 Magical Application Binary Tree IIIOshoPas encore d'évaluation
- Stats and Probability Unit UbdDocument54 pagesStats and Probability Unit Ubdapi-314438906100% (1)
- Graph Theory IIT KanpurDocument2 pagesGraph Theory IIT KanpurManoj NanduriPas encore d'évaluation
- Straight Line Graphs Exam QuestionsDocument7 pagesStraight Line Graphs Exam QuestionsLouis SharrockPas encore d'évaluation
- DI PCJ Paper07Document5 pagesDI PCJ Paper07qjsypjgw78Pas encore d'évaluation
- COSC 3100 Brute Force and Exhaustive Search: Instructor: TanvirDocument44 pagesCOSC 3100 Brute Force and Exhaustive Search: Instructor: TanvirPuneet MehtaPas encore d'évaluation
- A Complete Guide For Building A AVL TreeDocument5 pagesA Complete Guide For Building A AVL TreeSuvayan100% (4)
- Data Structures Using C++ Lab - Record - II A - Dec 2020Document68 pagesData Structures Using C++ Lab - Record - II A - Dec 2020SaravananPas encore d'évaluation
- Hamiltonian Paths in K-Alphabet Grid GraphsDocument5 pagesHamiltonian Paths in K-Alphabet Grid GraphsJournal of ComputingPas encore d'évaluation
- A Survey of Prim AlgorithmDocument3 pagesA Survey of Prim AlgorithmIJRAERPas encore d'évaluation
- Back TrackDocument37 pagesBack TrackMITALBAHEN DHOLAKIYAPas encore d'évaluation
- Cad For Ic: Question BankDocument7 pagesCad For Ic: Question Banknikhil_garg0% (1)
- 2017 Further Maths Exam 2 SolutionsDocument19 pages2017 Further Maths Exam 2 SolutionsDavid LinPas encore d'évaluation
- Existence of MatchingsDocument15 pagesExistence of MatchingsRoozbeh BassirianPas encore d'évaluation
- Matching: Algorithms and NetworksDocument52 pagesMatching: Algorithms and NetworksparticipantePas encore d'évaluation
- Syll PondicherryDocument33 pagesSyll PondicherryRoshan kumar sahuPas encore d'évaluation
- Energy Harvesting Sensor Network Matlab ReportDocument26 pagesEnergy Harvesting Sensor Network Matlab ReportRupam DasPas encore d'évaluation
- Theoretical General Issues)Document180 pagesTheoretical General Issues)huxton.zyheirPas encore d'évaluation
- Graph Theory 6Document30 pagesGraph Theory 6Zeeshan AhmedPas encore d'évaluation
- Bounds On The Distance Two-Domination NumberDocument9 pagesBounds On The Distance Two-Domination Numbervpro1Pas encore d'évaluation
- 1 Shortest Paths (Continued) : 1.1 Dijkstra's Algorithm (Continued)Document2 pages1 Shortest Paths (Continued) : 1.1 Dijkstra's Algorithm (Continued)Duaa Al-HasanPas encore d'évaluation