Vous aimerez peut-être aussi
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (894)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Overhead Water Tank Structural AnalysisDocument28 pagesOverhead Water Tank Structural Analysiscollins unanka100% (3)
- Travel Agency ManagementDocument47 pagesTravel Agency ManagementKatherine BarretoPas encore d'évaluation
- Scan & Pay Jio BillDocument22 pagesScan & Pay Jio BillsumeetPas encore d'évaluation
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- Destination Phrasal Verbs @destination - b1 - b2 - c1Document25 pagesDestination Phrasal Verbs @destination - b1 - b2 - c1Samira GulomovaPas encore d'évaluation
- Ancon Channel & Bolt FixingsDocument20 pagesAncon Channel & Bolt FixingsatiattiPas encore d'évaluation
- Super-Critical BoilerDocument32 pagesSuper-Critical BoilerAshvani Shukla100% (2)
- News App Magazine Live TVDocument14 pagesNews App Magazine Live TVrahul.yerrawarPas encore d'évaluation
- Monitoring Suspicious Discussions On Online Forums Using Data MiningDocument7 pagesMonitoring Suspicious Discussions On Online Forums Using Data Miningrahul.yerrawarPas encore d'évaluation
- Solid Modeling Techniques: Half Spaces Boundary Representation (B-Rep)Document21 pagesSolid Modeling Techniques: Half Spaces Boundary Representation (B-Rep)rahul.yerrawarPas encore d'évaluation
- Introducing Stock Research Portal 2.0: Ready To Take Your Next Step?Document18 pagesIntroducing Stock Research Portal 2.0: Ready To Take Your Next Step?rahul.yerrawarPas encore d'évaluation
- Scopus Preview - Scopus - International Journal of Psychosocial Rehabilitation PDFDocument2 pagesScopus Preview - Scopus - International Journal of Psychosocial Rehabilitation PDFrahul.yerrawarPas encore d'évaluation
- Open GLL ClassDocument114 pagesOpen GLL Classrahul.yerrawarPas encore d'évaluation
- HRD Minister Launches UGC Guidelines On Internship Embedded Degree Programmes at NEP 2020 ConclaveDocument3 pagesHRD Minister Launches UGC Guidelines On Internship Embedded Degree Programmes at NEP 2020 Conclaverahul.yerrawarPas encore d'évaluation
- Implementing The National Education Policy 2020Document17 pagesImplementing The National Education Policy 2020rahul.yerrawarPas encore d'évaluation
- HRD Minister Launches UGC Guidelines On Internship Embedded Degree Programmes at NEP 2020 ConclaveDocument3 pagesHRD Minister Launches UGC Guidelines On Internship Embedded Degree Programmes at NEP 2020 Conclaverahul.yerrawarPas encore d'évaluation
- 3D Projection Transformations and Opengl: Soon Tee Teoh Cs 116ADocument24 pages3D Projection Transformations and Opengl: Soon Tee Teoh Cs 116Arahul.yerrawarPas encore d'évaluation
- T-Box wind power generation from trainsDocument6 pagesT-Box wind power generation from trainsrahul.yerrawarPas encore d'évaluation
- UGC Journal Full Details PDFDocument1 pageUGC Journal Full Details PDFrahul.yerrawarPas encore d'évaluation
- FEA Syllabus PDFDocument1 pageFEA Syllabus PDFrahul.yerrawarPas encore d'évaluation
- An Interactive Introduction To Opengl ProgrammingDocument121 pagesAn Interactive Introduction To Opengl Programmingrahul.yerrawar100% (1)
- Computer Graphics CSC 830Document114 pagesComputer Graphics CSC 830rahul.yerrawarPas encore d'évaluation
- Csc461: Lecture 16 Opengl TransformationsDocument20 pagesCsc461: Lecture 16 Opengl Transformationsrahul.yerrawarPas encore d'évaluation
- Unit 1: Fundamental Concepts of FEA 6 HrsDocument1 pageUnit 1: Fundamental Concepts of FEA 6 Hrsrahul.yerrawarPas encore d'évaluation
- CS5 - 7ccoordinate Transformations and OpenGLDocument14 pagesCS5 - 7ccoordinate Transformations and OpenGLrahul.yerrawarPas encore d'évaluation
- Contineous PDFDocument15 pagesContineous PDFrahul.yerrawarPas encore d'évaluation
- Finite Element Method Some Thoughts: Tarun KantDocument37 pagesFinite Element Method Some Thoughts: Tarun Kantsantosh kumarPas encore d'évaluation
- Replying To Patent First Examination Report - IpleadersDocument4 pagesReplying To Patent First Examination Report - Ipleadersrahul.yerrawarPas encore d'évaluation
- Sherge ReferenceDocument5 pagesSherge Referencerahul.yerrawarPas encore d'évaluation
- Disruptive Technology: Margaret RouseDocument3 pagesDisruptive Technology: Margaret Rouserahul.yerrawarPas encore d'évaluation
- Bisection Method With AccuracyDocument1 pageBisection Method With Accuracyrahul.yerrawarPas encore d'évaluation
- Typical Experimental Design & Testing of Model MR Damper UsingDocument5 pagesTypical Experimental Design & Testing of Model MR Damper Usingrahul.yerrawarPas encore d'évaluation
- All All 'Enter The Number of Points ' 'Enter The Number of X Coordinates ' 'Enter The Number of y Coordinates ' 'Enter The Value of XG 'Document1 pageAll All 'Enter The Number of Points ' 'Enter The Number of X Coordinates ' 'Enter The Number of y Coordinates ' 'Enter The Value of XG 'rahul.yerrawarPas encore d'évaluation
- ANSYS 10.0 Workbench Tutorial - Exercise 7, ElectromagneticsDocument38 pagesANSYS 10.0 Workbench Tutorial - Exercise 7, ElectromagneticsGopal KrishanPas encore d'évaluation
- ANSYS 10.0 Workbench Tutorial - Exercise 7, ElectromagneticsDocument38 pagesANSYS 10.0 Workbench Tutorial - Exercise 7, ElectromagneticsGopal KrishanPas encore d'évaluation
- American Wire Gauge To Square MM Cross Sectional Area Chart 1.3.15.10 PDFDocument2 pagesAmerican Wire Gauge To Square MM Cross Sectional Area Chart 1.3.15.10 PDFrahul.yerrawarPas encore d'évaluation
- ChennaiDocument5 pagesChennairahul.yerrawarPas encore d'évaluation
- Amber ToolsDocument309 pagesAmber ToolshkmydreamsPas encore d'évaluation
- Critical Thinking Essay-Animal Testing: Rough DraftDocument10 pagesCritical Thinking Essay-Animal Testing: Rough Draftjeremygcap2017Pas encore d'évaluation
- Course-PM SSY135 Wireless Communications 21-22Document7 pagesCourse-PM SSY135 Wireless Communications 21-22Amirhossein MohsenianPas encore d'évaluation
- Mock PPT 2023 TietDocument22 pagesMock PPT 2023 Tiettsai42zigPas encore d'évaluation
- Science-6 - Q4 - W8-DLL - Mar 10Document2 pagesScience-6 - Q4 - W8-DLL - Mar 10cristina quiambaoPas encore d'évaluation
- Events of National Importance 2016Document345 pagesEvents of National Importance 2016TapasKumarDashPas encore d'évaluation
- Gentle Classical Nature Sample - Units1 and 2Document129 pagesGentle Classical Nature Sample - Units1 and 2Carita HemsleyPas encore d'évaluation
- ERC12864-12 DemoCode 4wire SPI 2Document18 pagesERC12864-12 DemoCode 4wire SPI 2DVTPas encore d'évaluation
- CHB1 Assignmen5Document2 pagesCHB1 Assignmen5anhspidermenPas encore d'évaluation
- Quiz 1Document3 pagesQuiz 1JULIANNE BAYHONPas encore d'évaluation
- MAPEH 6- WEEK 1 ActivitiesDocument4 pagesMAPEH 6- WEEK 1 ActivitiesCatherine Renante100% (2)
- Mohammad Abu-Radi ResumeDocument4 pagesMohammad Abu-Radi ResumeMohammad Abu-RadiPas encore d'évaluation
- ISO 17000 2004 Terms & DefintionsDocument6 pagesISO 17000 2004 Terms & DefintionsSelvaraj SimiyonPas encore d'évaluation
- Lab 01 - HCV and LCV by Gas CalorimeterDocument6 pagesLab 01 - HCV and LCV by Gas CalorimeterTakreem SindhuPas encore d'évaluation
- CSE (With SPL)Document65 pagesCSE (With SPL)parthasarathycsePas encore d'évaluation
- Naaqs 2009Document2 pagesNaaqs 2009sreenPas encore d'évaluation
- Writing A Spooky Setting DescriptionDocument4 pagesWriting A Spooky Setting DescriptionAayan AnjumPas encore d'évaluation
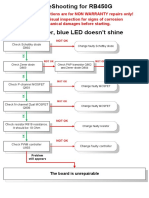
- RB450G Trouble ShootingDocument9 pagesRB450G Trouble Shootingjocimar1000Pas encore d'évaluation
- Brochure Troysperse+CD1+Brochure+ (TB0112)Document8 pagesBrochure Troysperse+CD1+Brochure+ (TB0112)mario3312Pas encore d'évaluation
- Materials For Oxygen ServicesDocument4 pagesMaterials For Oxygen Services陳文鴻Pas encore d'évaluation
- Managerial Performance Evaluation ProceduresDocument3 pagesManagerial Performance Evaluation Procedures1robcortesPas encore d'évaluation
- Lesson Element Baron-Cohen Et Al. (1997) : Instructions and Answers For TeachersDocument10 pagesLesson Element Baron-Cohen Et Al. (1997) : Instructions and Answers For TeachersSyed SumaiyahPas encore d'évaluation
- Design of Hydraulic Structures Seepage TheoryDocument13 pagesDesign of Hydraulic Structures Seepage TheorySuleman FaisalPas encore d'évaluation
- Campbell Soup Case-StudyDocument3 pagesCampbell Soup Case-StudyraghudeepaPas encore d'évaluation