Vous aimerez peut-être aussi
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (120)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- Toyota GD Series Diesel Engines: Eugenio, 77Document16 pagesToyota GD Series Diesel Engines: Eugenio, 77Sutikno100% (4)
- Motor Selection Guide PDFDocument56 pagesMotor Selection Guide PDFUdit AgrawalPas encore d'évaluation
- Motor Selection Guide PDFDocument56 pagesMotor Selection Guide PDFUdit AgrawalPas encore d'évaluation
- Comparison of GradesDocument4 pagesComparison of GradesSourav RobinPas encore d'évaluation
- Bucher LRV Hydraulic ValveDocument90 pagesBucher LRV Hydraulic Valvedean_lockey0% (1)
- Saes T 629Document10 pagesSaes T 629Azhar Saqlain.Pas encore d'évaluation
- Emacs CookbooksDocument102 pagesEmacs CookbooksDavid IrelandPas encore d'évaluation
- Review B4C Jace4865 Boron Carbide Structure Properties and Stability Under StressDocument24 pagesReview B4C Jace4865 Boron Carbide Structure Properties and Stability Under StressAlexandru PrisecaruPas encore d'évaluation
- Spring Support Used in PipingDocument7 pagesSpring Support Used in Pipingashish.mathur1Pas encore d'évaluation
- PRO-II Thermodynamic Model SelectionDocument79 pagesPRO-II Thermodynamic Model Selectionchemsac2100% (1)
- LGP4247L-12LPB-3P Eay62608902 PLDF-L103B Psu SM PDFDocument74 pagesLGP4247L-12LPB-3P Eay62608902 PLDF-L103B Psu SM PDF00dark100% (1)
- Drv8880 2-A Stepper Motor Driver With Autotune™: 1 Features 2 ApplicationsDocument48 pagesDrv8880 2-A Stepper Motor Driver With Autotune™: 1 Features 2 ApplicationsUdit AgrawalPas encore d'évaluation
- Hydraulic Gear Pumps and Motors: Edition: 01/10.2018Document60 pagesHydraulic Gear Pumps and Motors: Edition: 01/10.2018gomes_marina93Pas encore d'évaluation
- Stcs1A: 1.5 A Max Constant Current LED DriverDocument19 pagesStcs1A: 1.5 A Max Constant Current LED DriverUdit AgrawalPas encore d'évaluation
- Microcontroller Input / Output ExpanderDocument19 pagesMicrocontroller Input / Output ExpanderChristian CândidoPas encore d'évaluation
- MAX14871 4.5V To 36V Full-Bridge DC Motor Driver: General Description Benefits and FeaturesDocument15 pagesMAX14871 4.5V To 36V Full-Bridge DC Motor Driver: General Description Benefits and FeaturesUdit AgrawalPas encore d'évaluation
- GL Job Ref No:: Manhole Record Card Page 1 of 2Document2 pagesGL Job Ref No:: Manhole Record Card Page 1 of 2Udit AgrawalPas encore d'évaluation
- Hyd, Cyl, Welded - Catalouge PDFDocument1 pageHyd, Cyl, Welded - Catalouge PDFUdit AgrawalPas encore d'évaluation
- Design Procedure For Loading Capacity Calculations For Classic Automobile DifferentialsDocument9 pagesDesign Procedure For Loading Capacity Calculations For Classic Automobile DifferentialsSergio ChavezPas encore d'évaluation
- DRV870x-Q1 Automotive H-Bridge Gate Driver: 1 FeaturesDocument62 pagesDRV870x-Q1 Automotive H-Bridge Gate Driver: 1 FeaturesUdit AgrawalPas encore d'évaluation
- 9B - Dredge Crawler Technology - WODCON XXI - Leo W. Van Ingen MKII PDFDocument38 pages9B - Dredge Crawler Technology - WODCON XXI - Leo W. Van Ingen MKII PDFUdit AgrawalPas encore d'évaluation
- Design Procedure For Loading Capacity Calculations For Classic Automobile DifferentialsDocument9 pagesDesign Procedure For Loading Capacity Calculations For Classic Automobile DifferentialsSergio ChavezPas encore d'évaluation
- AC-DC NotesDocument6 pagesAC-DC NotesUdit AgrawalPas encore d'évaluation
- Cycloidal ProfileDocument4 pagesCycloidal ProfileUdit AgrawalPas encore d'évaluation
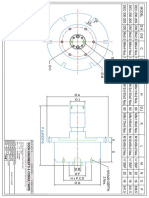
- Hyd, Rotary Cyl PDFDocument1 pageHyd, Rotary Cyl PDFUdit AgrawalPas encore d'évaluation
- Subsea Services FlyerDocument4 pagesSubsea Services FlyerUdit AgrawalPas encore d'évaluation
- 9B - Dredge Crawler Technology - WODCON XXI - Leo W. Van Ingen MKII PDFDocument38 pages9B - Dredge Crawler Technology - WODCON XXI - Leo W. Van Ingen MKII PDFUdit AgrawalPas encore d'évaluation
- 059 066Document8 pages059 066Mustafa KocPas encore d'évaluation
- Ac2887 70 Dfu AenDocument18 pagesAc2887 70 Dfu AenUdit AgrawalPas encore d'évaluation
- DC DC AppNotesDocument19 pagesDC DC AppNotesUdit AgrawalPas encore d'évaluation
- AC-DC NotesDocument6 pagesAC-DC NotesUdit AgrawalPas encore d'évaluation
- Sewage Cleaning ManipulatorDocument10 pagesSewage Cleaning ManipulatorUdit AgrawalPas encore d'évaluation
- PDFDocument4 pagesPDFUdit AgrawalPas encore d'évaluation
- Reduction of Output Ripple & NoiseDocument3 pagesReduction of Output Ripple & NoiseUdit AgrawalPas encore d'évaluation
- Murrata MEE3SDocument5 pagesMurrata MEE3SUdit AgrawalPas encore d'évaluation
- Sts BrochureDocument15 pagesSts BrochureUdit AgrawalPas encore d'évaluation
- Robotics Brochure 1Document2 pagesRobotics Brochure 1Udit AgrawalPas encore d'évaluation
- Pmled 6 5K 10a 66Document6 pagesPmled 6 5K 10a 66Eduardo SalgadoPas encore d'évaluation
- Grinding Polishing: Kiesow Dr. BrinkmannDocument36 pagesGrinding Polishing: Kiesow Dr. BrinkmannChoice OrganoPas encore d'évaluation
- Analysis and Design of MOSFET Based Amplifier in Different ConfigurationsDocument8 pagesAnalysis and Design of MOSFET Based Amplifier in Different ConfigurationsPraveen KumarPas encore d'évaluation
- RHS Columnuns Embedded in RC ResearchDocument29 pagesRHS Columnuns Embedded in RC ResearchErnie Ernie100% (1)
- Typical Signage Drawings: Information Sign ManualDocument49 pagesTypical Signage Drawings: Information Sign ManualMaynard BaricaPas encore d'évaluation
- Crow Proximity Reader ManualDocument8 pagesCrow Proximity Reader ManualMichael GiannakPas encore d'évaluation
- CV - Pramod For Store & Logistics..Document2 pagesCV - Pramod For Store & Logistics..Anuj sainiPas encore d'évaluation
- Thermodynamics: ENG 214 Chapter 3 - Heat & Work in Open Systems Chapter 4 - The First Law of ThermodynamicsDocument39 pagesThermodynamics: ENG 214 Chapter 3 - Heat & Work in Open Systems Chapter 4 - The First Law of ThermodynamicsGregory MacLeodPas encore d'évaluation
- Course Catalog 2019Document34 pagesCourse Catalog 2019Mehaboob BashaPas encore d'évaluation
- Case Study: Line 1 Metro de Quito (Ecuador) : Project Specifications Project FiguresDocument4 pagesCase Study: Line 1 Metro de Quito (Ecuador) : Project Specifications Project Figuresrodrigogomez87Pas encore d'évaluation
- Difference Between Nm3 Vs Sm3Document1 pageDifference Between Nm3 Vs Sm3Arun kumarPas encore d'évaluation
- GEN Reacool Maintenance Manual 1Document151 pagesGEN Reacool Maintenance Manual 1Md Saddam HossainPas encore d'évaluation
- TS 34Document2 pagesTS 34Sunil Maurya0% (1)
- Urethane UB-7 Catalog 2013Document32 pagesUrethane UB-7 Catalog 2013yfontalvPas encore d'évaluation
- s1fnmdl3sm PDFDocument26 pagess1fnmdl3sm PDFmn_aminPas encore d'évaluation
- Centrifugation (Separation Processes)Document25 pagesCentrifugation (Separation Processes)Allyana Marie Tiemsim100% (2)
- CH 16Document20 pagesCH 16Engr. Talha Riaz PersotaPas encore d'évaluation
- Mining and Earthmoving: Estimating Production Off-the-Job Grade Resistance Total Resistance TractionDocument4 pagesMining and Earthmoving: Estimating Production Off-the-Job Grade Resistance Total Resistance Tractionali alilouPas encore d'évaluation
- Classification Matter Flow ChartDocument1 pageClassification Matter Flow ChartKiera CeelyPas encore d'évaluation
- CM6 Combined 2013Document154 pagesCM6 Combined 2013مسعد مرزوقىPas encore d'évaluation
- StoichiotryDocument57 pagesStoichiotryJezriel Theana SisonPas encore d'évaluation
- Kubota Dual Fuel Series SpecificationDocument10 pagesKubota Dual Fuel Series Specificationפטריה מוזרPas encore d'évaluation