Vous aimerez peut-être aussi
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- Future Value TablesDocument123 pagesFuture Value TablesShankar ReddyPas encore d'évaluation
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Selecting Laboratory Tests To Predict Effectiveness of Retention and Drainage Aid ProgrammesDocument14 pagesSelecting Laboratory Tests To Predict Effectiveness of Retention and Drainage Aid Programmesshalu29Pas encore d'évaluation
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Servo Stabilizer ControllerDocument39 pagesServo Stabilizer Controllershalu29Pas encore d'évaluation
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- Details of Chemical VendorsDocument3 pagesDetails of Chemical Vendorsshalu29Pas encore d'évaluation
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Chemical Details For Paper IndustriesDocument2 pagesChemical Details For Paper Industriesshalu29Pas encore d'évaluation
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- Sinewave Inverter DC Capacitor Ripple CurrentDocument6 pagesSinewave Inverter DC Capacitor Ripple Currentshalu29Pas encore d'évaluation
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
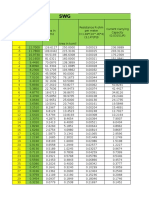
- SWG & MM ConversionDocument70 pagesSWG & MM Conversionshalu2980% (10)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- UChip PIC16F72 Based Relay TIMER Board CircuitDocument1 pageUChip PIC16F72 Based Relay TIMER Board Circuitshalu29Pas encore d'évaluation
- UChip PIC16F72 Based Relay TIMER Board CircuitDocument1 pageUChip PIC16F72 Based Relay TIMER Board Circuitshalu29Pas encore d'évaluation
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Household Power & Energy Consumption CalculationDocument2 pagesHousehold Power & Energy Consumption Calculationshalu29Pas encore d'évaluation
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- Water Automation Project ReportDocument23 pagesWater Automation Project ReportMahdee NafisPas encore d'évaluation
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Designing A Miniaturized Fluxgate MagnetometerDocument83 pagesDesigning A Miniaturized Fluxgate Magnetometershansov100% (1)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- Embedded System LabDocument62 pagesEmbedded System Labfatima100% (1)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- Synopsis On GSM Based Data LoggerDocument16 pagesSynopsis On GSM Based Data LoggerUday DesaiPas encore d'évaluation
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- Troubleshooting GuideDocument88 pagesTroubleshooting GuideFrancisco Diaz56% (9)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- SW-TM4C-RLN-2 1 0 12573Document36 pagesSW-TM4C-RLN-2 1 0 12573trungkiena6Pas encore d'évaluation
- Pic16f87 88Document214 pagesPic16f87 88api-19831863Pas encore d'évaluation
- Digital Control Engineering: Dr. Sadeq Al-MajidiDocument13 pagesDigital Control Engineering: Dr. Sadeq Al-Majidijin kazamaPas encore d'évaluation
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- Turbo SRMDocument786 pagesTurbo SRMYang HongPas encore d'évaluation
- Vlsi & SDLDocument8 pagesVlsi & SDLmycatalystsPas encore d'évaluation
- Programming Examples For Sampling and Generating of Analog Signals Programming Skeleton For On-Line Signal ProcessingDocument17 pagesProgramming Examples For Sampling and Generating of Analog Signals Programming Skeleton For On-Line Signal ProcessingMiriamPas encore d'évaluation
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- A DSP-Based Digital IF AM/FM Car-Radio ReceiverDocument4 pagesA DSP-Based Digital IF AM/FM Car-Radio ReceiverbmnaveenPas encore d'évaluation
- TDC Cookbook eDocument31 pagesTDC Cookbook ePeter BradbeerPas encore d'évaluation
- stm32 AdcDocument35 pagesstm32 Adcabdou htPas encore d'évaluation
- Product Summary GuideDocument21 pagesProduct Summary GuideHofman PAtrickPas encore d'évaluation
- 1-Microcontroller Based System Design - CompleteDocument55 pages1-Microcontroller Based System Design - CompleteWasif Bin ArifPas encore d'évaluation
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- ArknavDocument47 pagesArknavGabriel KPas encore d'évaluation
- Operating Manual: Pressing Monitor EPW400Document116 pagesOperating Manual: Pressing Monitor EPW400GTutorPas encore d'évaluation
- Value-Instruments Cat2012 enDocument58 pagesValue-Instruments Cat2012 enAnonymous C6Vaod9Pas encore d'évaluation
- Oscillographic Measurements: 3.1. Waveform Display DevicesDocument28 pagesOscillographic Measurements: 3.1. Waveform Display DevicesSameh SherifPas encore d'évaluation
- ESSTECH About JitterDocument21 pagesESSTECH About JitterjmcyangPas encore d'évaluation
- Linear Magnetic SensorDocument1 pageLinear Magnetic Sensorpredrag152Pas encore d'évaluation
- PIC18F66K80 Family Silicon Errata and Data Sheet ClarificationDocument13 pagesPIC18F66K80 Family Silicon Errata and Data Sheet ClarificationFernando PeixeiroPas encore d'évaluation
- Guitar EffectsDocument11 pagesGuitar EffectsLima_198050% (2)
- Digital Voltmeter Using Arduino: University of Zakho Faculty of Science Department of Computer Science MicroprocessorDocument33 pagesDigital Voltmeter Using Arduino: University of Zakho Faculty of Science Department of Computer Science MicroprocessorAli KurdishPas encore d'évaluation
- 6.4 Digital Transmission: Pulse Amplitude Modulation (PAM) and Pulse Code Modulation (PCM)Document13 pages6.4 Digital Transmission: Pulse Amplitude Modulation (PAM) and Pulse Code Modulation (PCM)Khairil Azwan TugimanPas encore d'évaluation
- Study On Downhole Multi-Sensor Monitoring and Data Transmission of Electric Submersible PumpDocument4 pagesStudy On Downhole Multi-Sensor Monitoring and Data Transmission of Electric Submersible PumpRishal AliPas encore d'évaluation
- MT 8601 Design of Mechatronics System - Question BankDocument110 pagesMT 8601 Design of Mechatronics System - Question BankScientist SakthivelPas encore d'évaluation
- LAB1Document42 pagesLAB1farheen khosoPas encore d'évaluation
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)