Vous aimerez peut-être aussi
- PartsPro 34spanDocument12 pagesPartsPro 34spanguillermo arenas bautista100% (1)
- HUELLAS DEL FUTURO: El retorno de los Ayoreo a su territorioD'EverandHUELLAS DEL FUTURO: El retorno de los Ayoreo a su territorioPas encore d'évaluation
- Exámenes FyQ 3º ESODocument62 pagesExámenes FyQ 3º ESOadolfodcs4187100% (1)
- Guia Usuario DevconDocument148 pagesGuia Usuario DevconL Leoncio LinoPas encore d'évaluation
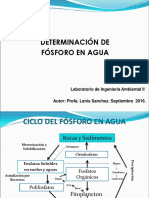
- Determinacion de Fosforo en AguaDocument14 pagesDeterminacion de Fosforo en AguaPatricia Perdomo de Méndez100% (4)
- Evaluación de Impacto Del FraccionamientoDocument125 pagesEvaluación de Impacto Del FraccionamientoRikardo Garcia SanchezPas encore d'évaluation
- 1.2.3 - IIEE. ESP. TECNICAS UNMSM-CF Rev1Document84 pages1.2.3 - IIEE. ESP. TECNICAS UNMSM-CF Rev1NicolasPercyRamirezBeltranPas encore d'évaluation
- Guía plantaciones forestales SantanderDocument42 pagesGuía plantaciones forestales SantanderwildarcticPas encore d'évaluation
- Guía plantaciones forestales SantanderDocument42 pagesGuía plantaciones forestales SantanderwildarcticPas encore d'évaluation
- Zonificacion ForestalDocument80 pagesZonificacion ForestalSebastian UlrichPas encore d'évaluation
- Envases Embalajes y EmpaquesDocument59 pagesEnvases Embalajes y EmpaquesLucas Paolo StingrayPas encore d'évaluation
- Dasonometría universitariaDocument16 pagesDasonometría universitariajhosmachPas encore d'évaluation
- A Curso de SecadoDocument166 pagesA Curso de Secadowildarctic100% (1)
- Anteproyecto LT 220 KV Cajamarca-Caclic-Moyobamba (16!02!2011) DGEDocument41 pagesAnteproyecto LT 220 KV Cajamarca-Caclic-Moyobamba (16!02!2011) DGEDavid Rodrigo Hallasi Gil100% (2)
- Guías de Mejores Prácticas en Sistemas de Producción de Leche Con Base en Pasturas para El Trópico Alto ColombianoDocument142 pagesGuías de Mejores Prácticas en Sistemas de Producción de Leche Con Base en Pasturas para El Trópico Alto ColombianogilbertPas encore d'évaluation
- Guia de Manejo de Bosques - BDocument105 pagesGuia de Manejo de Bosques - BHugo Llabres100% (1)
- Módulo de Educación Ambiental de Conservación de Las Aves de La RUMCLADocument21 pagesMódulo de Educación Ambiental de Conservación de Las Aves de La RUMCLAPablo AlarcónPas encore d'évaluation
- Ecuaciones Volumen ComercialDocument40 pagesEcuaciones Volumen ComercialRudy AlejandroPas encore d'évaluation
- Evaluación de Efectividad de Manejo de Cinco APMC To PDF FINAL 2011-2-1Document45 pagesEvaluación de Efectividad de Manejo de Cinco APMC To PDF FINAL 2011-2-1Marco León Baque100% (1)
- DD USUEV Version3Document217 pagesDD USUEV Version3Emmanuel PerezPas encore d'évaluation
- Planificación agroecológica de la fincaDocument5 pagesPlanificación agroecológica de la fincaLuisa Fernanda Negrette MestraPas encore d'évaluation
- Diseño Agroecológico Finca El Silencio APRODESADocument50 pagesDiseño Agroecológico Finca El Silencio APRODESAFranky Angel MelendezPas encore d'évaluation
- Ganaderia Cartilla Web Marcadores Safe FinalDocument41 pagesGanaderia Cartilla Web Marcadores Safe FinalLuis F GOMEZ DUQUEPas encore d'évaluation
- Pauta Estudio de Suelos SAGDocument26 pagesPauta Estudio de Suelos SAGJoachim ZoraPas encore d'évaluation
- MonografaForestal13 FijacinCO2Document274 pagesMonografaForestal13 FijacinCO2Enrique Daniel ValderramaPas encore d'évaluation
- Zonas Aptas para La Ganaderia en ColombiaDocument4 pagesZonas Aptas para La Ganaderia en ColombiaVALERIA FERNANDA CASTRO BARRAGANPas encore d'évaluation
- Memoria Anual 2011 - Proyecto Manejo Sostenible de La Tierra - ApurímacDocument28 pagesMemoria Anual 2011 - Proyecto Manejo Sostenible de La Tierra - ApurímacMinamPeruPas encore d'évaluation
- Manejo Del Ganado Bajo Condiciones de SequiaDocument22 pagesManejo Del Ganado Bajo Condiciones de SequiaJuan Antonio Chavez DuronPas encore d'évaluation
- Monitoreo Comuntario PDFDocument196 pagesMonitoreo Comuntario PDFHeiber PantevezPas encore d'évaluation
- Ejecución Del Monitoreo Comunitario para La BiodiversidadDocument12 pagesEjecución Del Monitoreo Comunitario para La Biodiversidadwl5francoPas encore d'évaluation
- Manual Oso Pardo Sostenible PDFDocument45 pagesManual Oso Pardo Sostenible PDFselvyn_menPas encore d'évaluation
- Libro Agroforesteria Pecuaria 27 Junio 2017Document99 pagesLibro Agroforesteria Pecuaria 27 Junio 2017DavidPas encore d'évaluation
- Cartilla9 2016Document48 pagesCartilla9 2016Antonio Paz100% (1)
- Manejo de Despojo en Fauna Silvestre - Grupo 1Document41 pagesManejo de Despojo en Fauna Silvestre - Grupo 1Yeisi Mavelin Pacco OviedoPas encore d'évaluation
- Plan de Manejo Predial y Sus Etapas Planificación Del Manejo Sustentable y Diagnostico Del Predio Analisis de Rentabilidad de Un PredioDocument19 pagesPlan de Manejo Predial y Sus Etapas Planificación Del Manejo Sustentable y Diagnostico Del Predio Analisis de Rentabilidad de Un PredioJean Carlos Garcia Arana100% (2)
- Manual de Mejores Practicas de Manejo Forestal para La Conservacion de La Biodiversidad en Ecosistemas Tropicales de La Region Sureste de Mexico PDFDocument74 pagesManual de Mejores Practicas de Manejo Forestal para La Conservacion de La Biodiversidad en Ecosistemas Tropicales de La Region Sureste de Mexico PDFBrayan QuiñoneszPas encore d'évaluation
- Flora de Las FM Rocosas de La Lindosa PDFDocument164 pagesFlora de Las FM Rocosas de La Lindosa PDFestebangt05Pas encore d'évaluation
- Turismo de Naturaleza en Colombia PDFDocument38 pagesTurismo de Naturaleza en Colombia PDFClaudia Milena OrozcoPas encore d'évaluation
- El Agroecosistema Como Habitat de La Biodiversidad Rugerio Sanchez Alejandra AbigailDocument4 pagesEl Agroecosistema Como Habitat de La Biodiversidad Rugerio Sanchez Alejandra AbigailabigailPas encore d'évaluation
- Libro Restauracion de EcosistemasDocument88 pagesLibro Restauracion de Ecosistemasservicios y labores agroforestales100% (1)
- Manejo Holístico® Currículum 1 - 10 Principios - 2008Document31 pagesManejo Holístico® Currículum 1 - 10 Principios - 2008Anabel Godina Medina100% (1)
- BancosForrajerosVeranoDocument24 pagesBancosForrajerosVeranoGustavo ChavarriaPas encore d'évaluation
- Planificación Predial Participativa para La Adopción de Buenas Prácticas AgroecológicasDocument5 pagesPlanificación Predial Participativa para La Adopción de Buenas Prácticas AgroecológicasAnonymous RrT4w73RXPPas encore d'évaluation
- Valoración económica del servicio ambiental hídrico de la microcuenca BotijasDocument11 pagesValoración económica del servicio ambiental hídrico de la microcuenca BotijasDany Maicol Perez Chuquihuanca100% (1)
- Vivero ForestalDocument5 pagesVivero ForestalEdú Aquise TiconaPas encore d'évaluation
- Anexo 1.1. PORTAFOLIO INVESTIGACIÓN2016 PDFDocument43 pagesAnexo 1.1. PORTAFOLIO INVESTIGACIÓN2016 PDFAngelica MayorcaPas encore d'évaluation
- Apuntes ValoraciónDocument106 pagesApuntes ValoraciónJavier Badillo ChavezPas encore d'évaluation
- Sistemas de Monitoreo y Evaluación Ambiental para Sistemas Productivos AgroambientalesDocument60 pagesSistemas de Monitoreo y Evaluación Ambiental para Sistemas Productivos AgroambientalesnathaliePas encore d'évaluation
- Biodiversidad: Aproximación A La Diversidad Botánica y Zoológica de EspañaDocument368 pagesBiodiversidad: Aproximación A La Diversidad Botánica y Zoológica de EspañaLilliamMdezPas encore d'évaluation
- Manual Diseño de Planes Integrales PredialesDocument32 pagesManual Diseño de Planes Integrales PredialesNixon Zabala100% (1)
- Colombia ForestalDocument97 pagesColombia ForestalMiguel Ángel BedoyaPas encore d'évaluation
- Indices de VegetacionDocument7 pagesIndices de VegetacionEDUARDO MARTIN LOPEZ CORDOVAPas encore d'évaluation
- Indicadores para El Monitoreo A Escala Predial en El Marco Del Manejo de Bosques Con Ganadería Integrada (MBGI)Document19 pagesIndicadores para El Monitoreo A Escala Predial en El Marco Del Manejo de Bosques Con Ganadería Integrada (MBGI)Franco Diaz100% (5)
- Cartilla Bosque Seco PDFDocument28 pagesCartilla Bosque Seco PDFlucia alegriaPas encore d'évaluation
- Manual Capacitacion AgroforesteriaDocument80 pagesManual Capacitacion Agroforesteriarhmirah27100% (1)
- Conservación del Heloderma 2020-2025Document28 pagesConservación del Heloderma 2020-2025Gabriela CoronadoPas encore d'évaluation
- Reintroduccion de Vizcachas en El RVS Los Ñanduces - Evaluac 2016Document12 pagesReintroduccion de Vizcachas en El RVS Los Ñanduces - Evaluac 2016Gustavo AprilePas encore d'évaluation
- Localidad de Suba, Bogotá Colombia Conectividad EcologicaDocument146 pagesLocalidad de Suba, Bogotá Colombia Conectividad Ecologicaesocacao1117565Pas encore d'évaluation
- Revista Latinoamericana de Herpetología Vol.3 #2Document175 pagesRevista Latinoamericana de Herpetología Vol.3 #2ReticulatusPas encore d'évaluation
- ESTUDIO DE BIODIVERSIDAD EN EL CACAO - CONSERVACION & DESARROLLO, Make A Donation@ccd - Org.ec / Haga Una DonaciónDocument92 pagesESTUDIO DE BIODIVERSIDAD EN EL CACAO - CONSERVACION & DESARROLLO, Make A Donation@ccd - Org.ec / Haga Una DonaciónCONSERVACION Y DESARROLLO SOSTENIBLEPas encore d'évaluation
- Empresa de avistamiento de aves en GualiváDocument60 pagesEmpresa de avistamiento de aves en GualiváAlex ValeroPas encore d'évaluation
- Efectos Del Desarrollo de Un Nuevo Centro TuristicoDocument4 pagesEfectos Del Desarrollo de Un Nuevo Centro TuristicoCarlos La Rosa VillafrancaPas encore d'évaluation
- Manual de Nutricion y Fertilizacion de PDocument100 pagesManual de Nutricion y Fertilizacion de PRonald Rosado SaltosPas encore d'évaluation
- Guia para El Establecimiento de ParcelasDocument59 pagesGuia para El Establecimiento de Parcelashumberto hernandez sotoPas encore d'évaluation
- Pájaros de cuidado: Reflexiones y divagaciones sobre aves, personas, ciencia y culturaD'EverandPájaros de cuidado: Reflexiones y divagaciones sobre aves, personas, ciencia y culturaPas encore d'évaluation
- Manejo integrado de la polilla guatemalteca de la papa (Tecia solanivora, Povolny)D'EverandManejo integrado de la polilla guatemalteca de la papa (Tecia solanivora, Povolny)Pas encore d'évaluation
- Melastomatáceas Con Potencial Ornamental en Reservas NaturalesDocument29 pagesMelastomatáceas Con Potencial Ornamental en Reservas NaturaleswildarcticPas encore d'évaluation
- Caracterizacion de La Estructura Vertical y Horizontal en Bosques Pino EncinoDocument117 pagesCaracterizacion de La Estructura Vertical y Horizontal en Bosques Pino EncinoBriggeth FloresPas encore d'évaluation
- Guia Ilustrada Canon de Rio Porce Antioq PDFDocument268 pagesGuia Ilustrada Canon de Rio Porce Antioq PDFjucapazPas encore d'évaluation
- Perfil Productivo - San MartínDocument56 pagesPerfil Productivo - San MartínwildarcticPas encore d'évaluation
- Aproximacion Ot Laguna GuacocharaDocument134 pagesAproximacion Ot Laguna GuacocharawildarcticPas encore d'évaluation
- Herramienta Gestion InvasionesfDocument158 pagesHerramienta Gestion InvasionesfwildarcticPas encore d'évaluation
- Germenes de Futuro Gestión Prospectiva SFCDocument107 pagesGermenes de Futuro Gestión Prospectiva SFCwildarcticPas encore d'évaluation
- Cadena Productiva Madera, Tableros Ales y MueblesDocument176 pagesCadena Productiva Madera, Tableros Ales y MueblesGustavoPas encore d'évaluation
- Silvicultura ColombiaDocument304 pagesSilvicultura ColombiaClaudia Forero100% (1)
- 10063guia Especies IntroducidasMarinoCosDocument136 pages10063guia Especies IntroducidasMarinoCosSharon FreemanPas encore d'évaluation
- Inf. Diagnostico Rio CusianaDocument989 pagesInf. Diagnostico Rio CusianawildarcticPas encore d'évaluation
- Catálogo de Plantas Invasoras de Los Humedales de Bogotá - 2012Document248 pagesCatálogo de Plantas Invasoras de Los Humedales de Bogotá - 2012Daniel Palacios100% (1)
- Metodologia General de Estudio de Impacto AmbientalDocument72 pagesMetodologia General de Estudio de Impacto AmbientalCarlos David RodriguezPas encore d'évaluation
- Educación Ambiental en El Pomca de Rio NegroDocument26 pagesEducación Ambiental en El Pomca de Rio NegrowildarcticPas encore d'évaluation
- Los Bosques Del Mundo 2012-FAODocument64 pagesLos Bosques Del Mundo 2012-FAOforestaljcPas encore d'évaluation
- Corpoamazonia - Pomca Q - DamasDocument159 pagesCorpoamazonia - Pomca Q - DamasLina Paola Ariza PinzonPas encore d'évaluation
- Plan Prospectivo AgropecuarioDocument361 pagesPlan Prospectivo Agropecuariodaniel_thompson_28Pas encore d'évaluation
- Acuerdo 016 de 2011 - Adopcion PMDC Suelos de TibaitataDocument10 pagesAcuerdo 016 de 2011 - Adopcion PMDC Suelos de TibaitatawildarcticPas encore d'évaluation
- El Compañero Del TrepadorDocument54 pagesEl Compañero Del Trepadorwildarctic100% (1)
- Identificacion y Manejo Plagas ArbolesDocument45 pagesIdentificacion y Manejo Plagas ArboleswildarcticPas encore d'évaluation
- 9especiesfinal PDFDocument266 pages9especiesfinal PDFwildarcticPas encore d'évaluation
- Atlas Visuales Oceano - GeologiaDocument82 pagesAtlas Visuales Oceano - Geologiawildarctic0% (1)
- Reserva Forestal Protectora Bosque Oriental Bogota Inventario FaunaDocument133 pagesReserva Forestal Protectora Bosque Oriental Bogota Inventario FaunawildarcticPas encore d'évaluation
- Lección 4: Imperfecciones y DifusiónDocument3 pagesLección 4: Imperfecciones y Difusiónjav1ruloPas encore d'évaluation
- Datos de Radiacion Solar en Bolivia PDFDocument9 pagesDatos de Radiacion Solar en Bolivia PDFbryanerickjorgebPas encore d'évaluation
- Tratamiento de la enfermedad de Alzheimer mediante terapiacombinada de aféresis terapéutica y hemoféresis con albúmina einmunoglobulina intravenosa: fundamentos y aproximaciónterapéutica al estudio AMBAR (Alzheimer Management ByAlbumin Replacement)Document9 pagesTratamiento de la enfermedad de Alzheimer mediante terapiacombinada de aféresis terapéutica y hemoféresis con albúmina einmunoglobulina intravenosa: fundamentos y aproximaciónterapéutica al estudio AMBAR (Alzheimer Management ByAlbumin Replacement)Antonio TovarPas encore d'évaluation
- Manual Echometer TWMDocument14 pagesManual Echometer TWMjuanc964Pas encore d'évaluation
- Topografía I: Alineamientos, trazos y medidasDocument14 pagesTopografía I: Alineamientos, trazos y medidasKelvin Cáceres VásquezPas encore d'évaluation
- Termómetro BimetálicoDocument5 pagesTermómetro BimetálicoJuan Carlos CastroPas encore d'évaluation
- Libro La OdiseaDocument21 pagesLibro La OdiseaProtin gustPas encore d'évaluation
- L 22 Tipos Pinturas Apuntes PDFDocument25 pagesL 22 Tipos Pinturas Apuntes PDFRocío Paz Vargas CortesPas encore d'évaluation
- Ficha Tecnica GLOBALDocument2 pagesFicha Tecnica GLOBALRodolfo Garduño ColínPas encore d'évaluation
- Artículo de Zumo de LimónDocument12 pagesArtículo de Zumo de LimónJessica YanonPas encore d'évaluation
- Informe ParkinsonDocument27 pagesInforme ParkinsonMartaGonzalezPas encore d'évaluation
- REVISTA CESVIMAP OPERACIONES de RIESGO Prevencion de Riesgos Laborales en CarroceriaDocument4 pagesREVISTA CESVIMAP OPERACIONES de RIESGO Prevencion de Riesgos Laborales en Carroceriajjossette2081100% (1)
- Marco TeóricoDocument15 pagesMarco TeóricoAldo Celaya TonchezPas encore d'évaluation
- Principios para Selección de Sierras CircularesDocument26 pagesPrincipios para Selección de Sierras CircularesJoas Alvarez PizarroPas encore d'évaluation
- Uso de Fosfuro de Alumnio...Document110 pagesUso de Fosfuro de Alumnio...rocio martinPas encore d'évaluation
- Charlas de CapacitaciónDocument15 pagesCharlas de CapacitaciónkarladelrociorelaizaPas encore d'évaluation
- Optimizacion Gestion Mantenimiento Superintendencia Basado Mantenimientos PreventivosDocument135 pagesOptimizacion Gestion Mantenimiento Superintendencia Basado Mantenimientos PreventivosYuleangi JimenezPas encore d'évaluation
- Titulacion 180202004 Instaladores de Redes Internas de GasDocument21 pagesTitulacion 180202004 Instaladores de Redes Internas de Gasjohnfavila100% (1)
- Rotonda 640: guía completa del sistema de carpintería de aluminioDocument88 pagesRotonda 640: guía completa del sistema de carpintería de aluminioBerenice BlancoPas encore d'évaluation
- Tratamiento de Aire Contaminado Con h2s UtilizandDocument6 pagesTratamiento de Aire Contaminado Con h2s UtilizandLuigi Castro SosaPas encore d'évaluation
- Thule-Racks Spanish CatalogDocument64 pagesThule-Racks Spanish CatalogGoodBikes100% (1)
- Grabado VerdeDocument8 pagesGrabado VerdeElias Vergara CastilloPas encore d'évaluation
- Ejercicios PotenDocument1 pageEjercicios PotenMartín SosaPas encore d'évaluation