Académique Documents
Professionnel Documents
Culture Documents
6° Manual de Diseño de Mecanismos
Transféré par
brian antonioTitre original
Copyright
Formats disponibles
Partager ce document
Partager ou intégrer le document
Avez-vous trouvé ce document utile ?
Ce contenu est-il inapproprié ?
Signaler ce documentDroits d'auteur :
Formats disponibles
6° Manual de Diseño de Mecanismos
Transféré par
brian antonioDroits d'auteur :
Formats disponibles
PROGRAMA EDUCATIVO: LICENCIATURA EN INGENIERA MECANICA
MANUAL DE PRCTICAS DE LA ASIGNATURA: DISEO DE MECANISMOS
UNIVERSIDAD AUTNOMA DEL ESTADO
DE
HIDALGO
ESCUELA SUPERIOR DE CIUDAD SAHAGN
PROGRAMA EDUCATIVO: LICENCIATURA EN INGENIERA MECNICA
MANUAL DE PRCTICAS DE: DISEO DE MECANISMOS
PROGRAMA EDUCATIVO: LICENCIATURA EN INGENIERA MECANICA
MANUAL DE PRCTICAS DE LA ASIGNATURA: DISEO DE MECANISMOS
SEMESTRE SEXTO
FECHA DE APROBACIN DEL MANUAL DE PRCTICAS, POR ACADEMIA RESPECTIVA.
10 febrero de 2016
NOMBRE DE QUIENES PARTICIPARON EN LA ELABORACIN:
NOMBRE
FIRMA
M. en C. Arturo Cruz Avils
Dr. Martn Ortiz Domnguez
Ing. Oscar Negrete Seplveda
VO. BO. DEL PRESIDENTE Y SECRETARIO DE LA ACADEMIA.
NOMBRE
FIRMA
M. en C. Arturo Cruz Avils
Ing. Juan Carlos Fernndez ngeles
VO. BO. DEL COORDINADOR DEL PROGRAMA EDUCATIVO.
NOMBRE
M. en C. Yira Muoz Snchez
FECHA DE LA LTIMA REVISIN Y/O ACTUALIZACIN.
10 febrero de 2016 / Actualizacin diciembre 2016
FIRMA
PROGRAMA EDUCATIVO: LICENCIATURA EN INGENIERA MECANICA
MANUAL DE PRCTICAS DE LA ASIGNATURA: DISEO DE MECANISMOS
DIRECTORIO:
MTRO. HUMBERTO AUGUSTO VERAS GODOY
RECTOR
MTRO. ADOLFO PONTIGO LOYOLA
SECRETARIO GENERAL
ING. MARTN ORTIZ GRANILLO
DIRECTOR DE: LA ESCUELA SUPERIOR DE CIUDAD SAHAGN
LIC. ARTURO FLORES LVAREZ
DIRECTOR GENERAL DE SERVICIOS ACADMICOS
LIC. MARIO VIGUERAS MELO
SECRETARIO ACADMICO DE: LA ESCUELA SUPERIOR DE CIUDAD SAHAGN
M. EN C. YIRA MUOZ SNCHEZ
COORDINADORA DEL P.E. DE: LICENCIATURA EN INGENIERA MECNICA
PROGRAMA EDUCATIVO: LICENCIATURA EN INGENIERA MECANICA
MANUAL DE PRCTICAS DE LA ASIGNATURA: DISEO DE MECANISMOS
NDICE
ENCUADRE DEL MANUAL DE PRCTICAS..............................................................1
1.- Introduccin........................................................................................................ 1
2.- Competencias genricas..................................................................................... 2
3.- Programa del Sistema de Prcticas y Actividades Extramuros...........................2
NORMAS DE SEGURIDAD. REGLAMENTOS, LINEAMIENTOS Y MANUALES......2
1.- Reglamento de Laboratorios............................................................................... 2
2.- Medidas de Seguridad en los Laboratorios, Talleres, Clnicas y Actividades
Extramuros.............................................................................................................. 7
3.- Lineamientos de seguridad para trabajar en laboratorios, clnicas, talleres y
actividades extramuros............................................................................................ 9
NORMAS DE SEGURIDAD ESPECFICAS DE LA PRCTICA................................14
CONTENIDO DE CADA PRCTICA EN PARTICULAR............................................15
PRCTICA 1. Anlisis de mecanismos de cuatro barras..............................................15
PRCTICA 2. ANLISIS DE MECANISMOS POR ORDENADOR .....................................................23
PRCTICA 3. CALCULO DEL PERFIL DE UNA LEVA ..................................................................35
PRCTICA 4. NOMENCLATURA Y TALLADO DE DIENTES DE ENGRANES .......................................60
Prctica 5. Calculo del movimiento de trenes de engranes.
76
PROGRAMA EDUCATIVO: LICENCIATURA EN INGENIERA MECANICA
MANUAL DE PRCTICAS DE LA ASIGNATURA: DISEO DE MECANISMOS
ENCUADRE DEL MANUAL DE PRCTICAS.
1.- Introduccin.
La matemtica, la fsica y la qumica son las ciencias fundamentales en que se basa la
ingeniera. En la mayora de los casos, la ingeniera implica el anlisis de las
conversiones de energa de alguna fuente hacia una o ms salidas, usando uno o ms de
los principios bsicos de esas ciencias. La mecnica de solidos es una de las ramas de
la fsica que, entre otras, contiene otras tres ramificaciones principales: la cinemtica,
que trata del estudio del movimiento relativo; la esttica, que es el estudio de las fuerzas
y momentos, separados del movimiento, y la cintica, que trata de la accin de las
fuerzas sobre los cuerpos. La combinacin de la cinemtica y la cintica se denomina
dinmica. Necesarias para llevar a cabo el diseo de un mecanismo.
Un mecanismo es un dispositivo mecnico que tiene el propsito de transferir el
movimiento y/o fuerza de una fuente a una salida. Un eslabonamiento consiste en
eslabones o barras, generalmente considerados rgidos, conectados por juntas como
pasadores o revolutas o juntas prismticas, para formar cadenas o lazos abiertos o
cerrados. Tales cadenas cinemticas, con un eslabn fijo como mnimo, son:
1. Mecanismos, si por lo menos otros dos eslabones retienen movilidad.
2. Estructuras, si no hay movilidad alguna.
En otras palabras, un mecanismo permite el movimiento relativo entre sus eslabones
rgidos; una estructura, en cambio, no lo permite. Como los eslabonamientos forman
mecanismos simples y pueden disearse para efectuar
tareas complejas, como
movimiento no lineales y transmisin de fuerza. Algunos de los procedimientos para el
diseo de eslabonamiento presentados aqu son consecuencia de un resurgimiento de la
teora de los mecanismos basado en la disponibilidad de computadoras.
2.- Competencias genricas
Competencia de pensamiento crtico:
.
Pgina
PROGRAMA EDUCATIVO: LICENCIATURA EN INGENIERA MECANICA
MANUAL DE PRCTICAS DE LA ASIGNATURA: DISEO DE MECANISMOS
Aplicar el pensamiento crtico y autocrtico para identificar, plantear y resolver problemas
por medio de los procesos de abstraccin, anlisis y sntesis, procesando la informacin
procedente de diversas fuentes que permitan un aprendizaje significativo y una
actualizacin permanente.
3.- Programa del Sistema de Prcticas y Actividades Extramuros.
NM.
UNIDAD
PROGRAMTICA
PROGRAMACIN
NOMBRE
MBITO
DE LA
PRCTICA
DE
DESARROLLO
DE LA
PRCTICA
(SEMANA)
Anlisis de mecanismos
de cuatro Barras
Anlisis de mecanismos
por ordenador
Calculo del movimiento de
una leva
Nomenclatura y tallado de
dientes
Movimiento de trenes de
Engranes
En la
industria
En la
industria
En la
industria
En la
industria
En la
industria
Semana 1,
2, 3, 4
Semana 5,
6, 7, 8
Semana 9,
10, 11, 12
Semana 13,
14, 15, 16
Semana 13,
14, 15, 16
SESIONES
DE
PRCTICA
NORMAS DE SEGURIDAD. REGLAMENTOS, LINEAMIENTOS Y MANUALES.
1.- Reglamento de Laboratorios.
Reglamento de Laboratorio. Aprobado por el H. Consejo Universitario, segn acta
nmero 196 de la sesin efectuada el da 30 de noviembre de 1998.
CAPTULO 1
Disposiciones generales
.
Pgina
PROGRAMA EDUCATIVO: LICENCIATURA EN INGENIERA MECANICA
MANUAL DE PRCTICAS DE LA ASIGNATURA: DISEO DE MECANISMOS
Artculo 1. La Universidad Autnoma del Estado de Hidalgo, en uso de las facultades que
le confieren su Ley Orgnica y el Estatuto General, expide el presente reglamento, que
tiene por objeto normar el funcionamiento y uso de sus laboratorios.
Artculo 2. Los Laboratorios, tienen como objetivos:
I.
Apoyar los procesos de enseanza-aprendizaje en la Universidad
Autnoma del Estado de Hidalgo, de acuerdo con los planes y
programas de estudio de los diferentes niveles educativos que
as lo requieran.
II.
Apoyar y promover el desarrollo y ejecucin de proyectos de
investigacin de las diversas unidades acadmicas de la
Universidad, fomentando el trabajo multi e interdisciplinario.
III.
Coadyuvar con los diferentes sectores externos a la Universidad,
proporcionando los servicios, de acuerdo a los convenios
contrados.
CAPTULO III
De los usuarios
Artculo 18. Se consideran como usuarios de los laboratorios:
.
Pgina
PROGRAMA EDUCATIVO: LICENCIATURA EN INGENIERA MECANICA
MANUAL DE PRCTICAS DE LA ASIGNATURA: DISEO DE MECANISMOS
I.
Los alumnos de la Universidad que, conforme a los planes y
programas de estudio de los diferentes niveles educativos,
requieran de este apoyo.
II.
El personal acadmico de la Universidad que requiera apoyo de
los laboratorios.
III.
Los estudiantes o pasantes que se encuentren realizando tesis o
prcticas profesionales, prestatarios de servicio social o
colaborando en actividades acadmicas.
IV.
Los profesores visitantes que requieran de la utilizacin o
Servicios de los laboratorios de acuerdo a convenios
establecidos.
V.
Las personas que, por causa acadmica justificada, autorice el
Director de la Unidad Acadmica.
Artculo 22. Los usuarios estudiantes a que se refiere la fraccin III del artculo 18 de este
reglamento podrn hacer uso del laboratorio, clnica o taller de que se trate, con la
acreditacin respectiva y cuando cuenten con la asesora del director de tesis o del
investigador responsable del proyecto en el que participan, previo registro ante el Jefe de
Laboratorios, del protocolo de investigacin aprobado y con el visto bueno del Director de
la Unidad Acadmica.
Artculo 23. Los profesores visitantes nacionales o extranjeros debern acreditar su
pertenencia a la institucin que representan, as como los programas y convenios con los
que se relaciona la actividad por realizar y tener aprobados los proyectos de
investigacin.
CAPTULO IV
De la operacin y uso
Pgina
PROGRAMA EDUCATIVO: LICENCIATURA EN INGENIERA MECANICA
MANUAL DE PRCTICAS DE LA ASIGNATURA: DISEO DE MECANISMOS
Artculo 24. Los laboratorios permanecern abiertos en el horario definido por cada
Unidad Acadmica. Cualquier uso fuera del horario de operacin, deber ser autorizado
por el director de la Unidad Acadmica.
Artculo 25. Durante el tiempo de operacin de los laboratorios, solamente tendrn
acceso para su uso, en los horarios previamente establecidos:
I.
El personal adscrito a los mismos.
II.
Los usuarios a quienes se refiere el artculo 18 de este
reglamento.
Artculo 26. De los activos de cada laboratorio se levantar un inventario detallado y
actualizado con la intervencin del Jefe de Laboratorios y el responsable del Laboratorio
y el Departamento de Activos Fijos, dependiente de la Direccin de Recursos Materiales
enviando copia al director de la Unidad Acadmica que corresponda.
Artculo 27. Tras la adquisicin o prdida de algn equipo o mobiliario de laboratorio, el
Jefe de Laboratorio tiene la obligacin de notificar inmediatamente su alta o baja dentro
del inventario. En caso de prdida, se proceder a levantar un acta informativa y se
seguir el procedimiento legal que corresponda.
Artculo 28. Cada laboratorio deber contar con un archivo general, manuales de
prcticas y de operacin, una bitcora actualizada de servicios prestados, prcticas o
proyectos realizados, otra bitcora por cada equipo que as lo requiera, y una copia del
inventario interno actualizado, que sern resguardados por el Responsable del
Laboratorio.
Artculo 29. Las llaves de las puertas de acceso al laboratorio y de las dems reas
fsicas del mismo, estarn en poder del Responsable, y se contar con un duplicado en la
direccin de la Unidad Acadmica.
Artculo 30. Las mesas de trabajo de cualquier laboratorio, clnica y taller, sern usadas
mientras dure la prctica, por lo que no se podr dejar material en ellas por mayor tiempo
del autorizado. En el caso de tratarse de procesos continuos que no se puedan
interrumpir, se comunicar al Responsable.
Artculo 31. Los espacios fsicos destinados a cubculos u oficinas dentro de los
laboratorios, as como el mobiliario, equipo y materiales para el mismo fin, slo podrn
ser utilizados por el personal adscrito al laboratorio.
.
Pgina
PROGRAMA EDUCATIVO: LICENCIATURA EN INGENIERA MECANICA
MANUAL DE PRCTICAS DE LA ASIGNATURA: DISEO DE MECANISMOS
Artculo 32. Durante su estancia en los laboratorios, toda persona se abstendr de fumar,
de consumir alimentos, del uso de telfono celular y radiolocalizador. La no observancia
a esta disposicin causar la suspensin del derecho al uso de los laboratorios.
Artculo 33. Los equipos, herramientas, reactivos y materiales del laboratorio, que se
empleen durante una prctica o prestacin de servicios, quedarn bajo la
responsabilidad directa del usuario que los solicit. El solo hecho de hacer el vale
correspondiente no da derecho al usuario a sustraerlo de la Unidad, ni a conservarlo en
uso exclusivo ms del tiempo autorizado; salvo autorizacin especial y por escrito del
director de la Unidad Acadmica.
Artculo 34. Todo material y equipo solicitados debern ser devueltos al Responsable del
Laboratorio, quien tiene la obligacin de revisar que estn completos y en buen estado.
En caso contrario, registrar este hecho en la bitcora del laboratorio, o del equipo
especfico, notificando inmediatamente al Jefe de Laboratorios, quien har un convenio
con el o los alumnos para fincar la responsabilidad y acordar la modalidad de la
reparacin de la prdida o dao, lo cual ser informado a la direccin de la Unidad
Acadmica.
Artculo 35. Toda prdida o dao al equipo o del material causados por el usuario sern
repuestos o reparados por l mismo, en especie o pagos, a travs de depsito bancario o
directo en la Coordinacin de Administracin y Finanzas, en un lapso no mayor de quince
das hbiles, contados a partir de la fecha del incidente. De no cumplir lo anterior, se le
suspender el permiso para utilizar los laboratorios, clnicas o talleres y se sujetar a lo
dispuesto por la legislacin universitaria.
Artculo 36. La persona que haga mal uso del equipo, materiales o instalaciones, o que
presente un comportamiento indisciplinado, ser amonestada o se le suspender
temporal o definitivamente el permiso de uso de los laboratorios, clnica o taller, segn la
gravedad o frecuencia con que dicha accin se realice, y de acuerdo a lo establecido en
el reglamento interno de la Unidad Acadmica correspondiente.
Artculo 37. Es obligacin del Responsable del Laboratorio, supervisar el cumplimiento de
las reglas de seguridad, contar con carteles, cuadros u otros sealamientos. Ser su
responsabilidad revisar y actualizarlos peridicamente.
Artculo 38. Todo usuario alumno que no utilice o que haga mal uso de los materiales de
proteccin diseados para trabajar en el rea o que ponga en peligro a otros usuarios a
travs de su comportamiento inadecuado, se har acreedor a las siguientes sanciones:
Pgina
PROGRAMA EDUCATIVO: LICENCIATURA EN INGENIERA MECANICA
MANUAL DE PRCTICAS DE LA ASIGNATURA: DISEO DE MECANISMOS
I.
Ser amonestado verbalmente. De no corregir de inmediato su
actitud, le ser suspendida la autorizacin para seguir trabajando
ese da.
II.
En caso de reincidir, ser suspendido por el resto del semestre.
Artculo 39. El director de la Unidad Acadmica aplicar las sanciones referidas en el
artculo 38, segn la gravedad de la falta.
Artculo 40. Respecto a los usuarios acadmicos de la Universidad y a los profesores
visitantes que infrinjan las normas de seguridad y disposiciones de este reglamento, la
Direccin de la Unidad Acadmica comunicar a la Secretara General las faltas
cometidas para que, en su caso, se apliquen las sanciones que procedan.
Artculo 41. Ningn equipo, accesorio, material, reactivo o mobiliario podr ser sustrado
de los laboratorios, sin la autorizacin de la direccin de la Unidad Acadmica, debiendo
el Jefe de laboratorios, vigilar y registrar, de acuerdo a los procedimientos establecidos
por la Direccin de Recursos Materiales cualquier mudanza autorizada, fuera o dentro de
la unidad acadmica.
2.- Medidas de Seguridad en los Laboratorios, Talleres, Clnicas y Actividades
Extramuros.
Manual de Higiene, Seguridad y Ecologa. Direccin de Laboratorios, noviembre 2012.
Captulo 1. TODOS LOS ACCIDENTES SON PREVISIBLES
(Conceptos generales y definiciones)
Esta premisa se basa en que todos los accidentes, que por definicin, son producidos o
causados con la intervencin de seres humanos, que de alguna manera no prevn o
provocan condiciones o actos inseguros.
Los nicos no previsibles, son los que conocemos como actos de la Naturaleza:
tormentas, terremotos, erupciones volcnicas, etc.
De lo anterior, la primera regla de la seguridad, la regla de oro, es LA PREVENCIN.
Cmo prever accidentes?
.
Pgina
PROGRAMA EDUCATIVO: LICENCIATURA EN INGENIERA MECANICA
MANUAL DE PRCTICAS DE LA ASIGNATURA: DISEO DE MECANISMOS
Evitando cometer actos inseguros
Evitando o corrigiendo condiciones inseguras.
Los actos inseguros se refieren a la actuacin de las personas que ponen en riesgo su
seguridad, al tomar riesgos innecesarios, es decir, arriesgando de ms.
Las condiciones inseguras se refieren a las condiciones ambientales creadas o
existentes que pueden ocasionar un accidente.
Captulo 2. ORDEN Y LIMPIEZA EN LOS LABORATORIOS
El orden y limpieza son elementos esenciales de prevencin de accidentes.
La Higiene en los laboratorios es de primordial importancia, especialmente mientras y
despus de trabajar en ellos. Tanto en nuestras ropas como en nuestras manos podemos
traer rastros de sustancias qumicas o de reactivos que de no prever, podemos
contaminar nuestros alimentos al tocarlos o inclusive daar alguna superficie o a otras
personas.
Captulo 4. MEDIDAS Y EQUIPOS DE SEGURIDAD
MEJORES CONDICIONES DE SEGURIDAD
Los laboratorios de la UAEH deberan de contar con una serie de medidas, reglas y
equipos de seguridad que nos permita evitar accidentes.
Dentro de las medidas de seguridad, los laboratorios deben de contar con:
Sealamientos de NO FUMAR.
Sealamientos de NO INTRODUCIR O CONSUMIR ALIMENTOS.
Sealamientos alusivos a la SEGURIDAD.
Sealamientos alusivos a la PROTECCIN DE LA ECOLOGA.
Sealamientos de las RUTAS DE EVACUACIN en caso de siniestro.
Sealamientos de la UBICACIN y TIPO DE EXTINTORES DE INCENCIO.
Sealamientos de la ubicacin de la o las PUERTAS DE EMERGENCIA.
Sealamientos de la ubicacin de la REGADERA DE EMERGENCIA y del
LAVAOJOS.
Pgina
PROGRAMA EDUCATIVO: LICENCIATURA EN INGENIERA MECANICA
MANUAL DE PRCTICAS DE LA ASIGNATURA: DISEO DE MECANISMOS
3.- Lineamientos de seguridad para trabajar en laboratorios, clnicas, talleres y
actividades extramuros.
Lineamientos de uso de laboratorios, clnicas y/o talleres de institutos y escuelas
superiores
DE LOS USUARIOS (ALUMNO/ALUMNA):
I. Respetar la Normatividad Universitaria vigente.
II. Los alumnos slo podrn trabajar y permanecer en el laboratorio bajo la supervisin
directa del profesor, de acuerdo al Artculo 20 del Reglamento de Laboratorios. En
ningn caso el auxiliar o responsable de laboratorio, podr suplir al maestro
investigador en su funcin.
III. Para asistir a sesiones de laboratorio, es requisito indispensable presentarse con
manual de prcticas, gua de trabajo y/ de investigacin, con los materiales que no son
especficos de los laboratorios y portar adecuadamente su equipo de seguridad segn
aplique:
Laboratorios aplica para Licenciaturas en: Qumica, Qumica en Alimentos,
Biologa, Ing. Industrial, Ing. Mecnica, Arquitectura, Ing. en Geologa
Ambiental, Ing. Min. Met., C. Mat., Fsica, Nutricin, Farmacia. Asistir al
laboratorio con bata reglamentaria blanca y de manga larga, para el Laboratorio
de Manufactura ser bata de color azul marino y de manga larga, para Medicina
(filipina, pantaln, zapatos) y para Enfermera (pelo recogido y sin adornos, uas
cortas y sin alhajas).
Taller: aplica para Licenciaturas en: Ing. Civil, bata reglamentaria blanca o color y
de manga larga, zapato bota y antiderrapantes, portar en cada visita a obra y en la
realizacin de trabajo en campo el casco de seguridad tipo jockey y el chaleco de
seguridad de malla con franja reflejante. Min. Metalrgico (bata blanca o color y
de manga larga),
Clnicas aplica para Licenciaturas en: Odontologa (filipina, pelo recogido),
Pgina
PROGRAMA EDUCATIVO: LICENCIATURA EN INGENIERA MECANICA
MANUAL DE PRCTICAS DE LA ASIGNATURA: DISEO DE MECANISMOS
Cocinas aplica para Licenciaturas en: Turismo y Gastronoma asistir a
laboratorios (filipina, pantaln de algodn, zapatos antiderrapantes, gorro y/o
cofia),
IV. La entrada al laboratorio ser a la hora exacta de acuerdo a lo Programado.
V. El laboratorio no proporcionar manuales de prcticas a los usuarios, ya que stos
sern suministrados por el catedrtico de la materia correspondiente.
VI.-Todo usuario trabajar con el equipo de seguridad que se requiera, (bata blanca,
filipina, careta, mascarilla, cubre boca, cubre pelo, cofia, pantaln de algodn, guantes
de hule ltex, zapato de piso o antiderrapante, guantes quirrgicos, guantes industriales
y/o de asbesto, debe utilizar guantes para el manejo de simuladores y/o modelos durante
la realizacin de los procedimientos as como las indicaciones del profesor o bien del
investigador.
VII. El usuario tendr cuidado de no contaminar los reactivos o tomar alguno
directamente con la mano. Existen muchos reactivos de los cuales se preparan
soluciones diluidas, que son altamente corrosivos. En este sentido, el contacto con ellos
deber ser reducido al mnimo con las manos, la nariz o la boca. Usar en todos los casos
una perilla o propipeta para auxiliarte al tomar la cantidad deseada de reactivo. Manual
de Ecologa, Seguridad e Higiene.
VIII. Con respecto al equipo elctrico ste deber ser revisado antes y despus de su
uso, inclusive no debe quedar conectado aparato alguno durante vacaciones y fines de
semana.
IX. Equipo o mquina que no conozca su funcionamiento ni lo toque, puede provocar
algn accidente por favor solicite asesora a su catedrtico!
X. Por ningn motivo pipetear las soluciones con la boca, no debes PIPETEAR
directamente del frasco que contiene al reactivo. Con esto, se evitar que los reactivos
se contaminen y que los resultados de tu prctica (y la de los dems) se vean afectados.
Para ello, toma slo la cantidad necesaria en un vaso de precipitados y NO DEVUELVAS
EL RESTANTE al frasco de origen. Manual de Higiene, Seguridad y Ecologa.
XI. Si necesitas preparar una solucin de un reactivo que desprende gases (como los
cidos o el amoniaco) HAZLO EN LA CAMPANA y no en las mesas de laboratorio. Activa
los extractores. Manual de Higiene, Seguridad y Ecologa.
Pgina
PROGRAMA EDUCATIVO: LICENCIATURA EN INGENIERA MECANICA
MANUAL DE PRCTICAS DE LA ASIGNATURA: DISEO DE MECANISMOS
XII. En caso de que alguna sustancia corrosiva te caiga en la piel o en los ojos, LAVA
INMEDIATAMENTE la parte afectada al chorro del agua durante al menos 5 minutos y
AVISA A TU PROFESOR. Si el derrame fue en una gran rea de la piel, si el derrame fue
en de la ropa, usa las regaderas que estn ubicadas en el laboratorio. Manual de
Procedimientos Departamento Control del Medio Ambiente DLA-MO-7.2-01.6.
XIII. Cuando peses en la balanza cualquier producto qumico hazlo en un pesafiltro o en
un recipiente adecuado, NUNCA en un trozo de papel. Adems, procura no tirar el
producto alrededor de la balanza ya que puedes daarla. Si esto sucede lmpialo
inmediatamente con una brocha y/o con un trozo de tela limpio. Manual de Higiene,
Seguridad y Ecologa.
XIV. Las sustancias que se manejan comnmente en el laboratorio son altamente
contaminantes. Como UNIVERSITARIOS tenemos gran compromiso con el cuidado del
medio ambiente y en consecuencia debemos desecharlas de manera adecuada conforme
a las indicaciones que te indique tu catedrtico. NO DESECHES TUS SOLUCIONES,
RESIDUOS O PRODUCTOS DIRECTAMENTE EN LA TARJA, utiliza los contenedores
correspondientes al tipo de sustancia en particular. Manual de Higiene, Seguridad y
Ecologa.
XV. Todo frasco, bolsa, caja o contenedor, debern ser etiquetados. Por lo tanto
cualquier sustancia con recipiente no etiquetado ser desechada. Manual de
Procedimientos Departamento Control del Medio Ambiente DLA-MO-7.2-01.6.
XVI. Todo usuario de laboratorio o taller, debe conocer la ubicacin de los extintores, las
puertas de emergencia, y la circulacin del lugar en caso de emergencia.
XVII. El usuario solicitar el equipo, utensilios, herramienta, material y reactivos de
acuerdo a las especificaciones del manual de prcticas, mediante el vale de laboratorio,
Formato DLA-009, y su identificacin oficial de la U.A.E.H.
XVIII. Que el usuario que reciba el material sea el mismo que solicite durante el
desarrollo y el que haga entrega al final de la prctica.
XVIII. Los usuarios debern revisar el mobiliario, equipo, herramienta y material que se
les proporcione, verificando que est limpio, ordenado, completo y funcionando, el cual
deber ser devuelto en las mismas condiciones. Solo Gastronoma para la recepcin de
material es imprescindible que el alumno revise su requisicin con un da de anticipacin
para evitar la prdida de prctica, siendo cada caso en especfico.
XIX. Al devolver el mobiliario, equipo y material, el usuario deber solicitar el vale de
laboratorio Formato DLA-009 y su identificacin oficial de la U.A.E.H.
.
Pgina
PROGRAMA EDUCATIVO: LICENCIATURA EN INGENIERA MECANICA
MANUAL DE PRCTICAS DE LA ASIGNATURA: DISEO DE MECANISMOS
XX. Cuando el material quede bajo la responsabilidad del usuario, el vale de laboratorio
Formato DLA-009 y su identificacin oficial de la U.A.E.H., ser retenido por el auxiliar o
responsable hasta la devolucin del material.
XXI. En caso de prdida, ruptura o desperfecto del equipo o material de laboratorio, el
usuario solicitar al auxiliar el vale de adeudo Formato DLA-010 el cual debe anotar el
nombre y nm. de cuenta de todos los integrantes del equipo y ser respaldado con su
identificacin oficial de la U.A.E.H., se deber reponer en un plazo no mayor a 15 das
hbiles., para lo cual se retendr el vale de adeudo y su identificacin oficial de la
U.A.E.H.
XXII. Si el material adeudado no es repuesto en el plazo fijado, el o los usuarios
responsables, no podrn continuar con la realizacin de las prcticas correspondientes.
Control de adeudo Formato DLA-011.
XXIII. En caso de no cumplir con la reposicin del material en el plazo establecido, el
integrante del equipo o grupo, segn sea el caso, sern dados de alta, en la aplicacin
del sistema de control de adeudos en laboratorios implementado en la U.A.E.H.
XXIV. La acreditacin de cada una de las prcticas que se realicen, estar sujeta a la
evaluacin que aplique el catedrtico.
XXV. El usuario que realice prctica de recuperacin deber cumplir con lo estipulado en
el punto III.
XXVI. Los alumnos que por indisciplina o negligencia pongan en peligro su integridad, la
de sus compaeros, la del mobiliario, material, utensilios o la de las instalaciones, sern
sujetos a la sancin correspondiente prevista en el Reglamento de Laboratorios Artculo
36 y 38. Por la naturaleza de las cosas que existen en el laboratorio debes mantenerte
alerta y sin distracciones (no corras, no se permiten equipos de sonido personales).
TAMPOCO SE ACEPTAN VISITAS a las horas de laboratorio.
XXVII. El usuario que incurra en alguna falta acadmica ser sancionado de acuerdo a la
Normatividad Universitaria vigente.
XXVIII. Queda estrictamente prohibido realizar cualquier tipo de actividad ajena al
desarrollo de las tareas propias del laboratorio, clnica y/o taller.
XXIX. Todo usuario deber entrar y salir por los accesos autorizados, en orden y
cuidando su integridad y la de sus compaeros. (Manual de Higiene, Seguridad y
Ecologa, Capitulo 1).
.
Pgina
PROGRAMA EDUCATIVO: LICENCIATURA EN INGENIERA MECANICA
MANUAL DE PRCTICAS DE LA ASIGNATURA: DISEO DE MECANISMOS
XXX. Los usuarios deben reportar cualquier anomala o maltrato por parte del catedrtico
y del personal de laboratorio, al jefe de los mismos o en su caso a la Direccin de la
escuela.
XXXI. Al concluir la prctica, deben dejar limpia el rea de trabajo, as como el mobiliario,
material y equipos utilizados. NO TIRES PAPELES Y/O BASURA A LAS TARJAS, MESAS
Y EN EQUIPOS.
XXXII. Al concluir la licenciatura, maestra o doctorado y realicen su trmite de titulacin
al solicitar su constancia de no adeudo de material, herramienta y/o equipo de
laboratorios, clnicas y talleres, se realizara una donacin en especie a las, clnicas,
laboratorios y talleres correspondientes de acuerdo al Formato DLA-043, la cantidad de
la donacin ser entre tres y cuatro salarios mnimos vigente en el estado de Hidalgo
para ello es necesario entregar la nota y escribir en el formato el material donado,
posteriormente el documento que se extienda se entregar a la Direccin de Laboratorios
y Talleres donde se elabora y entrega la constancia de no adeudo.
XXXIII.- Las situaciones no previstas en este lineamiento sern resueltos por la Direccin
correspondiente y la Direccin de Laboratorios de acuerdo a la legislacin universitaria
aplicable.
XXXIV.- En los laboratorios se toma en cuenta la regla de cortesa la cual marca que por
ningn motivo o circunstancia las personas que se encuentren dentro de las
instalaciones del laboratorio, clnica y/o taller debern de nombrarse con apodos, malas
palabras o faltarse al respeto de cualquier connotacin sexual, racial o social. Siendo
caso contrario la Direccin correspondiente y la Direccin de Laboratorios de acuerdo a
la legislacin universitaria aplicable.
Nota: Los lineamientos de Uso de Laboratorios, Clnicas y/o Talleres de Institutos,
Escuelas Superiores y Bachilleratos derivan del Reglamento de Laboratorios,
Manual de Seguridad, Higiene y Ecologa y Documentos Institucionales.
NORMAS DE SEGURIDAD ESPECFICAS DE LA PRCTICA.
a.- Cuadro de normas y referencias de seguridad de la prctica, para su llenado,
consulte el Manual de Higiene, Seguridad y Ecologa
T IPO DE RIESGO
.
COMO EVITARLO
COMO PROCEDER EN CASO DE
Pgina
PROGRAMA EDUCATIVO: LICENCIATURA EN INGENIERA MECANICA
MANUAL DE PRCTICAS DE LA ASIGNATURA: DISEO DE MECANISMOS
UN ACCIDENTE
No aplica
No aplica
No aplica
b.- Cuadro de disposicin de residuos: consulte el Manual de Procedimientos del
Departamento de Control del Medio Ambiente. Plan de Manejo de los Residuos CRETI y
el Manual de Procedimientos del Departamento de Control del Medio Ambiente. Plan de
Manejo de los Residuos RPBI
T IPO DE RESIDUOS
CLASIFICACIN
T IPO DE CONTENEDOR
No aplica
No aplica
No aplica
CONTENIDO DE CADA PRCTICA EN PARTICULAR.
1. Identificacin.
NOMBRE
PRCTICA 1. Anlisis de mecanismos de cuatro
DE LA PRCTICA:
NO. DE PRCTICA:
barras.
1
NO. DE INTEGRANTES MXIMO POR EQUIPO:
.
NO. DE SESIONES:
3
Pgina
PROGRAMA EDUCATIVO: LICENCIATURA EN INGENIERA MECANICA
MANUAL DE PRCTICAS DE LA ASIGNATURA: DISEO DE MECANISMOS
2. Introduccin.
CLASIFICACIN DE LOS MECANISMOS DE CUATRO BARRAS
Los mecanismos articulados de cuatro barras, atendiendo a si alguno de sus elementos
puede efectuar una rotacin completa, se pueden clasificar en dos categoras:
CLASE I: Al menos una de las barras del mecanismo puede realizar una rotacin
completa (mecanismos de manivela).
CLASE II: Ninguna de las barras del mecanismo puede realizar una rotacin completa
(mecanismos de balancn).
El teorema de Grashof proporciona un medio para averiguar la clase a la que pertenece
un mecanismo articulado de cuatro barras, con slo conocer sus dimensiones y
disposicin. Si un cuadriltero no cumple dicho teorema pertenece a la clase II.
Definicin del teorema de Grashof : En un cuadriltero articulado, al menos una de sus
barras actuar como manivela, en alguna de las disposiciones posibles, si se verifica que
la suma de las longitudes de las barras mayor y menor es igual o inferior a la suma de las
longitudes de las otras dos.
En un cuadriltero articulado que cumple el teorema de Grashof, adems:
a) Si el soporte del mecanismo es la barra menor, las dos barras contiguas a l,
actan de manivelas (mecanismos de doble-manivela). Clase I.
b) Si el soporte del mecanismo es una de las barras contiguas a la menor, la barra
menor acta de manivela y su opuesta de balancn ( mecanismos de manivelabalancn). Clase I.
c) Cuando un mecanismo no cumple una de las condiciones anteriores (A o B), las
dos barras que giran respecto al soporte, se comportan como balancines
(mecanismos de doble-balancn). Clase II.
d) Paralelogramo articulado: Mecanismo donde cada barra es igual a su opuesta (la
barra soporte es igual a la biela y la barra conductora es igual a la barra
conducida). En este tipo de mecanismos las dos barras contiguas al soporte son
manivelas (mecanismos de doble-manivela)
DOBLE MANIVELA
Doble Manivela
Manivela-biela-manivela
Pgina
PROGRAMA EDUCATIVO: LICENCIATURA EN INGENIERA MECANICA
MANUAL DE PRCTICAS DE LA ASIGNATURA: DISEO DE MECANISMOS
L1 L3 L2 L4
AB Barra
CD Barra
Barra
AB
o
MANIVELA BALANCN
menor
mayor
fija
soporte
Manivela Balancn
Manivela-biela-balancn
L1 L3 L2 L4
BC Barra
CD Barra
Barra
AB
o
DOBLE BALANCN
menor
mayor
fija
soporte
Doble Balancn
Balancn-biela-balancn
L1 L3 L2 L4
CD Barra
AB Barra
Barra
AB
o
PARALELOGRAMO ARTICULADO
.
menor
mayor
fija
soporte
Paralelogramo
Articulado.
Pgina
PROGRAMA EDUCATIVO: LICENCIATURA EN INGENIERA MECANICA
MANUAL DE PRCTICAS DE LA ASIGNATURA: DISEO DE MECANISMOS
L1 L3 L2 L4
L1 L3
AD
y
BC
ANTIPARALELOGRAMO ARTICULADO
L2 L4
mismo
sentido
de
giro
Anti paralelogramo
Articulado.
L1 L3 L2 L4
L1 L3
AD
y
BC
L2 L4
mismo
sentido
de
giro
Pgina
PROGRAMA EDUCATIVO: LICENCIATURA EN INGENIERA MECANICA
MANUAL DE PRCTICAS DE LA ASIGNATURA: DISEO DE MECANISMOS
Figura 1.- Representacin de un cuadriltero articulado.
Los cuadrilteros articulados o mecanismos de cuatro barras (figura 1), en sus
diferentes configuraciones o como base de mecanismos ms complejos, son
disposiciones muy empleadas en todo tipo de mquinas.
Figura 2.- Representacin grfica del mecanismo de la maqueta
En la figura 2 se muestra la representacin grfica de la maqueta de un mecanismo
plano de ocho elementos, cuya base la compone un cuadriltero articulado ( O2O4, O4B,
BA y O2A).
3. Objetivo General.
Pgina
PROGRAMA EDUCATIVO: LICENCIATURA EN INGENIERA MECANICA
MANUAL DE PRCTICAS DE LA ASIGNATURA: DISEO DE MECANISMOS
El objetivo de esta prctica ser comprender sobre los mecanismos articulados planos,
centrndose principalmente en mecanismos de cuatro barras con su estudio cinemtico
preliminar a travs de una sntesis grfica de eslabonamientos para lograr los
movimientos o tareas en problemas de ingeniera no estructurados.
4. Objetivos Especficos.
1. Se realizar un estudio clasificatorio de los mecanismos articulados de cuatro
barras, mediante la ley de Grashof. Se efectuarn una serie de ejemplos de
aplicacin de dicho teorema
2. Se aplicarn los conocimientos de determinacin de centros de rotacin, ya
adquiridos, para hallar los centros instantneos de rotacin de cierto mecanismo.
5. Reactivos/insumos, materiales/utensilios y equipos.
A) REACTIVOS/INSUMOS.
CANTIDAD
No aplica
DESCRIPCIN
No aplica
B)
DESCRIPCIN
Hojas blancas
CANTIDAD
Gonimetro
Regla
ESPECIFICACIONES
Tamao A4 de cartoncillo
OBS.
El alumno
debe traer
las hojas.
EQUIPOS/INSTRUMENTOS.
DESCRIPCIN
OBS.
No aplica
MATERIALES/UTENSILIOS.
CANTIDAD
C)
ESPECIFICACIONES
No aplica
ESPECIFICACIONES
Para medicin de ngulos.
Marca Mitutoyo
Metlica de acero
inoxidable. TRUPER
OBS.
El equipo lo
proporciona
la institucin
El equipo lo
proporciona
la institucin
6. Desarrollo de la Actividad Prctica.
1. Utilizando como notacin la que aparece en la figura 1 (considerando 1 = 180 y
2 = 90), representar las siguientes configuraciones, especificando a qu clase
.
Pgina
PROGRAMA EDUCATIVO: LICENCIATURA EN INGENIERA MECANICA
MANUAL DE PRCTICAS DE LA ASIGNATURA: DISEO DE MECANISMOS
pertenece el cuadriltero y trazando las trayectorias aproximadas que generan los
puntos A y B con el movimiento del mecanismo.
L1 = 80 mm; L2 = 40 mm; L3 = 60 mm; L4 = 70 mm.
L1 = 70 mm; L2 = 60 mm; L3 = 40 mm; L4 = 60 mm.
L1 = 80 mm; L2 = 60 mm; L3 = 60 mm; L4 = 60 mm.
L1 = 40 mm; L2 = 60 mm; L3 = 80 mm; L4 = 90 mm.
2. A partir del mecanismo de la figura 2, se pide:
Determinar los centros instantneos de rotacin (CIR) de los elementos de los
mecanismos (relativos y absolutos).
Comentar que ocurre cuando el CIR de un elemento, relativo a otro elemento no
fijo (diferente del soporte), coincide con el CIR absoluto del citado elemento.
7. Cuestionario.
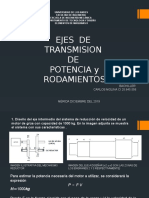
En la figura se observa el ensamble del tren de aterrizaje de un avin pequeo.
Clasifique el movimiento de este mecanismo de las cuatro barras con base en la
configuracin de los eslabones.
32in
15
12in
5in
26in
30in
A
30in
8. Bibliografa.
1. Mabie, H. H. and Reinholtz. C. F. (2005). Mecanismo y Dinmica de Maquinaria. D.F.,
Pgina
PROGRAMA EDUCATIVO: LICENCIATURA EN INGENIERA MECANICA
MANUAL DE PRCTICAS DE LA ASIGNATURA: DISEO DE MECANISMOS
Mxico: Limusa
2. Myszka, D. H. (2012). Mquinas y Mecanismos. Edo de Mxico, Mxico: Pearson Education.
3. Calero, P. R., Carta, J. A. (1999). Fundamentos de Mecanismos y Mquinas para Ingenieros.
Madrid, Espaa: McGraw-Hill.
4. Derrick, W. R. (1987). Variable Compleja con Aplicaciones. D. F., Mxico: Grupo Editorial
Iberoamrica.
5. Doughtie, V. L., James, W. H. (1986). Elementos de Mecanismos. D. F., Mxico: CECSA.
6. Erdman, A. G. y Sandor, G. N. (1998). Diseo de Mecanismos, Anlisis y Sntesis. D. F.,
Mxico: Prentice Hall.
7. Norton, R. L. (2000). Diseo de Maquinaria. Estado de Mxico: Mxico: Prentice Hall.
8. Juvinall, R. C., and Marshek, K. M. (1991). Fundamentals of Machine Component Design.
New York, US: John Wiley & Sons.
9. Norton, R. L. (1999). Design of Machinery: An Introduction tho the Synthesis and Analysis of
Mechanisms and Mechines. New York, US: McGraw-Hill.
a)
b)
c)
d)
e)
f)
g)
Introduccin
Objetivo
Desarrollo de la actividad prctica
Resultados
Discusin
Cuestionario
Bibliografa
9. Formato y especificacin del reporte de prctica.
Pgina
PROGRAMA EDUCATIVO: LICENCIATURA EN INGENIERA MECANICA
MANUAL DE PRCTICAS DE LA ASIGNATURA: DISEO DE MECANISMOS
1. Identificacin.
NOMBRE
PRCTICA
DE LA PRCTICA:
No. DE PRCTICA:
2.
ANLISIS
DE
MECANISMOS
POR
ORDENADOR
NO. DE SESIONES:
NO. DE INTEGRANTES MXIMO POR EQUIPO:
2. Introduccin.
Con el anlisis de un mecanismo se puede encontrar la respuesta de un sistema
mecnico ante diversas solicitaciones. Permite hallar, por ejemplo, las caractersticas del
movimiento de una manivela, de la trayectoria descrita por un punto de acoplador o
biela, de la velocidad de un punto o de la distribucin de acciones de inercia.
Inversamente, se conoce como sntesis cuando, dadas unas exigencias de
funcionamiento, se crea el mecanismo que resuelva o tienda a resolver dichos
requisitos.
Permite encontrar, por ejemplo, las dimensiones de un mecanismo de cuatro barras tal
que la manivela conducida genere una relacin de parmetros del mecanismo con tres
puntos de precisin (tres posiciones del mecanismo), o para que la trayectoria descrita
pase por determinados puntos, o para que la velocidad de un punto tenga un valor
especificado.
La sntesis de mecanismos permite determinar el mecanismo capaz de ofrecer una
respuesta preestablecida.
Se pueden definir, genricamente, sntesis y anlisis como:
SNTESIS: Es un proceso sistemtico, sin procedimiento de iteracin, de seleccionar y
organizar varios elementos de la manera apropiada, para generar las soluciones deseadas,
halladas desde unas restricciones y requerimientos de funcionamiento.
.
Pgina
PROGRAMA EDUCATIVO: LICENCIATURA EN INGENIERA MECANICA
MANUAL DE PRCTICAS DE LA ASIGNATURA: DISEO DE MECANISMOS
ANLISIS: Es un proceso sistemtico para verificar la solucin existente.
Es importante hacer constar que, en los procesos de ingeniera, los problemas de
sntesis pueden generar mltiples soluciones aceptables mientras que los problemas de
anlisis poseen una nica respuesta correcta.
MTODOS DE SNTESIS
Entre los procedimientos utilizados, para obtener por sntesis un mecanismo, se pueden
destacar los siguientes:
Sntesis de tipo o de Reuleaux: Esta sntesis consiste en la eleccin de los tipos de
eslabones y mecanismos a emplear (levas, engranajes, resortes, palancas) en el diseo,
en funcin de criterios de equivalencia, bondad y diversas cualidades de los
mecanismos.
Sntesis de nmero o de Gruebler: Esta sntesis trata de los grados de libertad, de las
cadenas cinemticas, de la topologa, isomorfismos, inversiones, configuraciones
cinemticas de un nmero de barras dado, de movilidad dada, etc. Durante este proceso
se eligen el nmero de barras y de pares que van a formar el mecanismo final.
Sntesis estructural o sistemtica: Esta sntesis comprende la sntesis de tipo y de
nmero. Normalmente, al efectuar la sntesis de un mecanismo se mezclan la sntesis de
tipo y de nmero y lo que realmente se est realizando es una sntesis estructural, es
decir, la eleccin del tipo de mecanismo (por ejemplo, un conjunto leva-seguidor o un
conjunto manivela-biela-balancn, etc.).
Sntesis dimensional o de Burmester: Aunque inicialmente se aplicaba esta
denominacin a todas las sntesis que determinaban las dimensiones de las barras de
un mecanismo (tras haber realizado la sntesis estructural), actualmente se reserva este
nombre para las sntesis geomtrico-planas que elabor Burmester: encuentra las
dimensiones (geomtricas) de las barras de un mecanismo para unas condiciones
geomtricas especificadas (guiado de un punto de una trayectoria recta, circular, etc.).
Sntesis de generacin de funciones o de coordinacin de barras: Aborda el
problema de coordinar las barras de entrada y salida de un mecanismo en un nmero
especificado de posiciones.
Sntesis de generacin de trayectorias: Afronta el problema de ubicar los puntos de
las barras de un mecanismo a lo largo de trayectorias preestablecidas.
.
Pgina
PROGRAMA EDUCATIVO: LICENCIATURA EN INGENIERA MECANICA
MANUAL DE PRCTICAS DE LA ASIGNATURA: DISEO DE MECANISMOS
Sntesis de guiado del cuerpo rgido: Trata el problema de situar el acoplador de un
mecanismo en un nmero especificado de posiciones.
Sntesis exactas: Se aplica este trmino a la sntesis en las que las condiciones
exigidas se pueden satisfacer exactamente.
Sntesis aproximadas: Se utiliza esta denominacin con las sntesis en las que las
condiciones exigidas no se pueden satisfacer sin cierto error. Debido, por un lado, a los
pequeos errores que producen las modernas sntesis aproximadas y, por otro, a que en
un mecanismo siempre existen errores constructivos, de desgastes, etc. En la prctica
industrial, las sntesis exactas son equivalentes a las aproximadas.
Sntesis con puntos de precisin: Se denomina as a las sntesis exactas de un
nmero finito de especificaciones. Por ejemplo: sntesis de generacin de funciones con
cinco puntos de precisin o sntesis de generacin de trayectorias con nueve puntos de
precisin.
Sntesis con derivadas de precisin: Se aplica este trmino a las sntesis en las que
existe coincidencia entre las caractersticas y derivadas de las caractersticas exigidas al
mecanismo, y las caractersticas y sus derivadas que el mecanismo proporciona.
Sntesis por tanteo grfico (mtodo overlay): Consiste en una sntesis aproximada
mediante un proceso de tanteo, ayudado por elementos auxiliares (grficos
superpuestos en papel transparente o, usando el ordenador, mediante superposicin de
grficos contenidos en diferentes capas). En general, no comporta clculos. Su principal
dificultad radica en que despus de muchos tanteos se puede estar tan lejos de la
solucin como en la primera prueba. Su principal ventaja es su sencillez.
Sntesis analticas, grficas o grafo-analticas: Se denominan as las sntesis que
emplean procedimientos analticos, grficos o mixtos, respectivamente, para su
resolucin.
Sntesis cinemticas: Son aquellas sntesis cuyas especificaciones son de tipo
cinemtico. Por ejemplo, el caso que la velocidad de un punto en una cierta trayectoria
sea constante o el caso que la aceleracin angular de una barra sea nula, etc.
Sntesis dinmicas: Reciben este nombre las sntesis cuyas especificaciones son
dinmicas. Por ejemplo, el caso que el centro de gravedad de un mecanismo sea
estacionario o el caso que las fuerzas de inercia sean minimizadas, etc.
Sntesis de Bloch: Se refiere este trmino a un grupo de sntesis que, empleando la
tcnica de los nmeros complejos, satisfacen requisitos cinemticos.
.
Pgina
PROGRAMA EDUCATIVO: LICENCIATURA EN INGENIERA MECANICA
MANUAL DE PRCTICAS DE LA ASIGNATURA: DISEO DE MECANISMOS
Sntesis planas y espaciales: Sntesis de mecanismos planos y espaciales,
respectivamente.
Sntesis de perodos de reposo: Esta sntesis aborda el problema de cuando una
barra presenta una detencin en un intervalo de su movimiento.
Sntesis de reduccin de puntos de posicin o de Hain: Es una sntesis dimensional,
en el sentido actual del trmino, en la que es posible aumentar el nmero de
condiciones de sntesis, o facilitar esta, a partir de una seleccin adecuada de los
puntos, de forma que en diversas posiciones estos puntos coincidan.
Sntesis de Chebyshev: Se llaman as a las sntesis que emplean los mtodos que
desarroll Chebyshev y que consisten en minimizar la mxima desviacin entre una
funcin y la producida por el mecanismo, expresada esta desviacin a travs de los
polinomios de Chebyshev.
Sntesis ptimas: As se denominan las sntesis aproximadas que emplean las tcnicas
de optimizacin.
Sntesis por grficos de diseo: Se llaman as a las sntesis obtenidas a travs de
tablas, nomogramas, grficos y otras ayudas que proceden del anlisis previo de
muchos mecanismos.
Sntesis de Lohse o mtodo p: Sntesis aproximada para el posicionado mltiple de
barras, basada en la curva de polos (Polotkurven).
Sntesis elastocinticas: Tcnica que consiste en involucrar en el proceso de la
sntesis las deformaciones elsticas producidas por las fuerzas de inercia y exteriores.
Sntesis elastotrmicas: Tcnica que consiste en implicar en el proceso de la sntesis
las deformaciones inducidas por la temperatura.
3. SNTESIS POR EXPANSIN, DEGENERACIN O INVERSIN
Una de las formas ms comunes de sintetizar mecanismos es introducir alteraciones en
alguno ya existente o en la cadena cinemtica origen. Estas variaciones pueden
generarse introduciendo nuevos elementos (adicin de dadas R o de rotacin R, dadas
P o prismticas, dadas H o helicoidale; agregar resortes, elementos unirrgidos, etc.),
por expansin de los pares cinemticos originarios, degeneracin de los elementos o
pares iniciales o, simplemente, por inversin del mecanismo primitivo. Un mecanismo,
en una determinada posicin, es cinemticamente equivalente a otro, si posee las
mismas caractersticas cinemticas de velocidad y aceleracin. As, se produce
expansin de los pares cinemticos cuando estos conservan el movimiento relativo pero
.
Pgina
PROGRAMA EDUCATIVO: LICENCIATURA EN INGENIERA MECANICA
MANUAL DE PRCTICAS DE LA ASIGNATURA: DISEO DE MECANISMOS
varan la forma (figura 1). Los mecanismos con pares expandidos son cinemticamente
equivalentes.
Fig. 01. Ejemplo de mecanismos equivalentes.
Otro de los mtodos ms empleados de disear mecanismos es mediante la sntesis por
degeneracin de ciertos elementos o pares, es decir, la modificacin sustancial de las
longitudes u otras caractersticas de los elementos y pares de un mecanismo (figura 2).
Balancn
Varilla
Muelle
Rueda gua
Culata
Vlvula
Leva
Figura 2.- Mecanismo del accionamiento de vlvula de un motor: ejemplo de la degeneracin de una
barra por un mecanismo de leva.
Se denomina inversin al intercambio de la funcin de un elemento por otro. Si la
funcin asignada es la de la barra fija del mecanismo, entonces existen N-1 inversiones,
siendo N el nmero de elementos de la cadena cinemtica. As, por ejemplo, una cadena
cinemtica de cuatro elementos tiene cuatro posibles inversiones (figura 3) y un
mecanismo de cuatro elementos (figura 3-a) presenta tres inversiones (figuras 3-b, 3-c y
3-d).
(a)
.
(b)
Pgina
PROGRAMA EDUCATIVO: LICENCIATURA EN INGENIERA MECANICA
MANUAL DE PRCTICAS DE LA ASIGNATURA: DISEO DE MECANISMOS
(c)
(d)
Figura 3.- Inversiones de una cadena cinemtica de cuatro elementos.
A veces, se requiere que una inversin con diferencia topolgica, entonces el nmero de
inversiones es menor de N-1. Para que dos inversiones sean diferentes topolgicamente
los mecanismos deben poseer una conexin de barras diferente: las barras fijas pueden
tener distinto nmero de pares, etc. Por ejemplo, la cadena cinemtica de Watt presenta
solamente dos inversiones con diferencia topolgica: los mecanismos Watt-1 y Watt-2
(figura 4).
Fijando 1, 2, 5 o 6
Fijando 3 o 4
Figura 4.- Cadena cinemtica de Watt y mecanismos Watt-1 y Watt-2.
SNTESIS GRFICA POR CURVAS DE ACOPLAMIENTO
En el cuadriltero articulado O2ABO4 de la figura 5, las barras 2, 3 y 4 se mueven en
planos paralelos, proyectndose en su verdadera magnitud sobre el plano del papel y
constituyendo as, un mecanismo plano.
En el citado mecanismo de la figura 5, los puntos de los planos paralelos en los que
estn contenidas las barras 2 y 4 (manivelas o balancines), recorren, como se sabe,
trayectorias circulares de centros O2 y O4 , respectivamente. Sin embargo, los puntos del
plano infinito de la biela o elemento acoplador (barra 3), describen trayectorias muy
diversas denominadas curvas de acoplamiento, cuyas ecuaciones son de sexto grado,
de resolucin grfica poco aconsejable.
Pgina
PROGRAMA EDUCATIVO: LICENCIATURA EN INGENIERA MECANICA
MANUAL DE PRCTICAS DE LA ASIGNATURA: DISEO DE MECANISMOS
Figura 5.- Representacin grfica del mecanismo prototipo
A cada punto del plano-biela (barra 3) le corresponde una trayectoria o curva distinta,
pero dentro de esta infinidad de curvas, se puede conseguir una serie de agrupaciones
por familias de curvas.
Segn Soni, se pueden distinguir seis tipos o familias de curvas de acoplador del
cuadriltero articulado:
Curvas formadas por arcos casi circulares.
Curvas formadas por arcos casi circulares y un segmento casi rectilneo.
Curvas formadas por arcos casi circulares y dos segmentos casi
rectilneos.
Curvas con puntos dobles o figuras en forma de ocho.
Curvas con forma de ala de avin.
Curvas con puntos de retroceso o cspides.
.
Pgina
PROGRAMA EDUCATIVO: LICENCIATURA EN INGENIERA MECANICA
MANUAL DE PRCTICAS DE LA ASIGNATURA: DISEO DE MECANISMOS
Figura 6.- Ejemplo de las curvas generadas por un eslabonamiento de cuatro barras.
Existen manuales* en los que se recopilan representaciones grficas de ms de 7000
curvas de acoplamiento, correspondientes a una serie de puntos del plano-biela,
tomando como unidad la longitud de la manivela conductora y variando las dimensiones
de las otras tres barras (figura 6).
Este tipo de manuales son de gran utilidad para el dimensionamiento de un mecanismo
del tipo cuadriltero articulado, cuando nos proponemos obtener unas determinadas
trayectorias.
Naturalmente, siguiendo este mtodo y con los medios informticos de alta velocidad de
resolucin de problemas grficos, de los que hoy se dispone, se podra llegar a
conseguir una gran reduccin de tiempo en disear el mecanismo deseado.
En la maqueta del mecanismo articulado de cuatro barras, utilizada en esta prctica de
laboratorio (figura 5), los puntos D, E y F, pertenecen a la biela AB y como puede
comprobarse, recorren trayectorias pertenecientes a distintas familias:
La trayectoria seguida por el punto D pertenece a la familia de curvas con tramos
aproximadamente rectos. Este tipo de trayectorias son obligadas al disear
ciertos mecanismos.
La trayectoria seguida por el punto E pertenece a la familia de curvas con
segmentos casi circulares, a las cuales se recurre a la hora de proyectar un
mecanismo en el cual la manivela conducida deba tener ciertas detenciones o
perodos de reposo, como el accionamiento desmodrmico de vlvulas.
La trayectoria seguida por el punto F pertenece a la familia de curvas con forma
de ocho, caractersticas de algunos mecanismos como los empleados en las
.
Pgina
PROGRAMA EDUCATIVO: LICENCIATURA EN INGENIERA MECANICA
MANUAL DE PRCTICAS DE LA ASIGNATURA: DISEO DE MECANISMOS
mquinas de coser.
NOTA.- La deteccin instantnea de la trayectoria de un punto ocurre slo cuando dicho punto tiene un
instante de velocidad nula, es decir, cuando es centro instantneo de rotacin. Luego, las cspides de las
trayectorias descritas por el acoplador (o por cualquier otro elemento de un mecanismo) aparecen cuando
el punto que genera la curva coincide con el centro instantneo de rotacin del elemento al cual
pertenece.
3. Objetivo General.
En esta prctica se analizar cinemticamente un determinado mecanismo empleando el
mtodo del cinema para poder encontrar la respuesta del sistema mecnico ante
diversas solicitaciones, para garantizar que el mecanismo o mquina propuesta no
fallar en condiciones de operacin.
4. Objetivos Especficos.
a) Encontrar las caractersticas de movimiento de una manivela de la trayectoria
descrita por un punto de acoplador o biela.
b) Encontrar la velocidad de un punto o de la distribucin de acciones de inercia.
5. Reactivos/insumos, materiales/utensilios y equipos.
D) REACTIVOS/INSUMOS.
CANTIDAD
No aplica
DESCRIPCIN
No aplica
E)
CANTIDAD
1
OBS.
No aplica
MATERIALES/UTENSILIOS.
DESCRIPCIN
Cadena cinemtica de Stephenson
F)
ESPECIFICACIONES
No aplica
ESPECIFICACIONES
El estudiante debe de
realizar la maqueta segn
las especificaciones,
OBS.
El alumno
debe de traer
la cadena
cinemtica
EQUIPOS/INSTRUMENTOS.
Pgina
PROGRAMA EDUCATIVO: LICENCIATURA EN INGENIERA MECANICA
MANUAL DE PRCTICAS DE LA ASIGNATURA: DISEO DE MECANISMOS
CANTIDAD
DESCRIPCIN
Regla
Gonimetro
ESPECIFICACIONES
Metlica de acero
inoxidable. TRUPER
Para medicin de ngulos.
Marca Mitutoyo
OBS.
El equipo
proporciona
institucin
El equipo
proporciona
institucin
lo
la
lo
la
6. Desarrollo de la Actividad Prctica.
1. Encontrar los mecanismos que resultan de todas las inversiones con diferencia
topolgica de la cadena de Stephenson (figura 7).
Figura 7.- Cadena cinemtica de Stephenson.
2. Representar grficamente, a escala real, las trayectorias descritas por los puntos
D, E, F y G, generadas durante el movimiento del mecanismo de la maqueta.
Representar grficamente, a la escala del dibujo de la figura 5 y ubicando su
posicin, las trayectorias descritas por los puntos D, E, F y G, generadas durante
el movimiento del mecanismo de la maqueta.
3. Determinar qu puntos de la trayectoria recorrida por el punto G, de la figura 5,
son puntos de detencin.
7. Cuestionario.
.
Pgina
PROGRAMA EDUCATIVO: LICENCIATURA EN INGENIERA MECANICA
MANUAL DE PRCTICAS DE LA ASIGNATURA: DISEO DE MECANISMOS
Figura 08.- Considere el mecanismo de biela manivela corredera
1.
Es posible en este mecanismo dejar fijo algn eslabn distinto al 1 y de esta
manera obtener 3 inversiones. Dibuje el mecanismo y el ejemplo.
a) La manivela se mantiene fija y se permite el movimiento de los dos eslabones ms,
lo que da un mecanismo utilizado en los primeros motores de aviacin, conocidos
como motores rotatorios debido a que el cigeal estaba fijo y los cilindros giraban
alrededor del mismo.
b) La biela se mantiene fija, esta inversin en forma modificada es la base para el
mecanismo de cepillo de manivela.
c) La corredera se mantiene fija. Se usa en las bombas de agua manuales.
2. Considerando el mecanismo biela-manivela-corredera mostrado en la figura 08,
obtenga las ecuaciones para el desplazamiento, velocidad y aceleracin de la
corredera en funcin de r , l , , . Sin hacer aproximaciones, w es constante.
3. La ecuacin aproximada para el desplazamiento de la corredera en el mecanismo
biel-manivela-corredera es x r 1 cos
r2
sen 2 y
2l
wt debido a que w es
constante. Obtenga las ecuaciones para la velocidad y la aceleracin de la
corredera si w no es constante.
8. Bibliografa.
1. Mabie, H. H. and Reinholtz. C. F. (2005). Mecanismo y Dinmica de Maquinaria. D.F.,
.
Pgina
PROGRAMA EDUCATIVO: LICENCIATURA EN INGENIERA MECANICA
MANUAL DE PRCTICAS DE LA ASIGNATURA: DISEO DE MECANISMOS
2.
3.
4.
5.
6.
7.
8.
9.
Mxico: Limusa
Myszka, D. H. (2012). Mquinas y Mecanismos. Edo de Mxico, Mxico: Pearson
Education.
Calero, P. R., Carta, J. A. (1999). Fundamentos de Mecanismos y Mquinas para
Ingenieros. Madrid, Espaa: McGraw-Hill.
Derrick, W. R. (1987). Variable Compleja con Aplicaciones. D. F., Mxico: Grupo Editorial
Iberoamrica.
Doughtie, V. L., James, W. H. (1986). Elementos de Mecanismos. D. F., Mxico: CECSA.
Erdman, A. G. y Sandor, G. N. (1998). Diseo de Mecanismos, Anlisis y Sntesis. D. F.,
Mxico: Prentice Hall.
Norton, R. L. (2000). Diseo de Maquinaria. Estado de Mxico: Mxico: Prentice Hall.
Juvinall, R. C., and Marshek, K. M. (1991). Fundamentals of Machine Component Design.
New York, US: John Wiley & Sons.
Norton, R. L. (1999). Design of Machinery: An Introduction tho the Synthesis and Analysis
of Mechanisms and Mechines. New York, US: McGraw-Hill.
9. Formato y especificacin del reporte de prctica.
Pgina
PROGRAMA EDUCATIVO: LICENCIATURA EN INGENIERA MECANICA
MANUAL DE PRCTICAS DE LA ASIGNATURA: DISEO DE MECANISMOS
a)
b)
c)
d)
e)
f)
g)
Introduccin
Objetivo
Desarrollo de la actividad prctica
Resultados
Discusin
Cuestionario
Bibliografa
1. Identificacin.
NOMBRE
DE LA PRCTICA:
No. DE PRCTICA:
PRCTICA 3. CALCULO DEL MOVIMIENTO DE UNA LEVA
NO. DE INTEGRANTES MXIMO POR EQUIPO:
NO. DE SESIONES:
2. Introduccin.
LEVAS
Dentro del esquema general de la mquina como conjunto mecnico, las levas
pertenecen al sistema de los elementos transmisores (figura 1).
Pgina
PROGRAMA EDUCATIVO: LICENCIATURA EN INGENIERA MECANICA
MANUAL DE PRCTICAS DE LA ASIGNATURA: DISEO DE MECANISMOS
Figura 1. Principales sistemas de una mquina.
Una leva es un elemento mecnico que transforma el movimiento segn una cierta ley. El
conjunto de transmisin est formado por dos elementos (figura 2): Leva y palpador o
seguidor (a veces existe un tercer elemento, el rodillo de contacto).
La ley de la leva puede definirse como la funcin que refleja la relacin entre el
desplazamiento de la leva (lineal o angular) y el del palpador (lineal o angular).
Figura 2. Mecanismo leva-palpador.
CLASIFICACIN DE LAS LEVAS Y PALPADORES
Clasificacin segn la geometra de la leva.
Pgina
PROGRAMA EDUCATIVO: LICENCIATURA EN INGENIERA MECANICA
MANUAL DE PRCTICAS DE LA ASIGNATURA: DISEO DE MECANISMOS
(a)
(b)
(c)
(d)
(e)
(f)
Figura 3. Clasificacin de las levas atendiendo a la forma de estas.
a) De rotacin o de disco
b) De translacin o de cua
c) Espacial cilndrica
d) Espacial glbica
e) Espacial frontal esfrica
f) Espacial frontal cilndrica
Clasificacin segn la geometra del extremo del palpador.
.
Pgina
PROGRAMA EDUCATIVO: LICENCIATURA EN INGENIERA MECANICA
MANUAL DE PRCTICAS DE LA ASIGNATURA: DISEO DE MECANISMOS
(a)
(b)
(c)
(d)
(e)
(f)
(g)
(h)
(i)
(j)
Figura 4. Clasificacin de las levas atendiendo a la forma del extremo del palpador.
a) Palpador de rodillo.
d) P. de cara plana inclinado.
b) Palpador puntual.
e) P. de cara curva simtrico.
c) P. plano o de cara plana recto.
f) P. de cara curva asimtrico.
Clasificacin segn el movimiento del palpador.
Palpador con movimiento de translacin:
Excntrico (figura 2).
Axial (figura 3-a)
Palpador con movimiento de rotacin u oscilante (figura 4-g).
Pgina
PROGRAMA EDUCATIVO: LICENCIATURA EN INGENIERA MECANICA
MANUAL DE PRCTICAS DE LA ASIGNATURA: DISEO DE MECANISMOS
Clasificacin segn el plano movimiento de la leva y del palpador.
Mecanismo leva-palpador plano: Los movimientos de la leva y del palpador se
realizan en un mismo plano o en planos paralelos (figuras 3-a y 3-b).
Mecanismo leva-palpador espacial: Los movimientos de la leva y del palpador se
realizan en planos diferentes no paralelos (figuras 3-c y 3-d).
Clasificacin segn el cierre del par superior.
Enlace leva-palpador con cierre por fuerza (figura 2).
Enlace leva-palpador con cierre por forma (figura 3-c).
TERMINOLOGA
En la Figura 5 se muestra una transmisin con un mecanismo de leva plano con palpador
de rodillo. La terminologa asociada al mismo, es la siguiente:
Circunferencia base: Es la circunferencia ms pequea, de radio Rb, que puede
trazarse con centro en el eje de rotacin de la leva y tangente a la superficie fsica de
sta. En el caso de un palpador de rodillo es ms pequea que la circunferencia primaria,
siendo la diferencia el radio del rodillo Rr.
Circunferencia primaria: Es la circunferencia ms pequea, de radio Rp, que se puede
trazar con centro en el eje de rotacin de la leva y tangente a la curva de paso. Esta slo
se aplica en el caso de palpadores circulares o curvos.
Curva de paso: Es la trayectoria que describe el centro del rodillo en la referencia
solidaria a la leva, al completarse una vuelta de esta. Corresponde a la curva offset (perfil
terico de la leva), separada una distancia igual al radio del rodillo Rr del perfil real de la
leva. En el caso de un palpador puntual (Rr = 0), el perfil terico coincide con el perfil real
de la leva.
Punto de trazo: Es un punto del palpador que al realizar la inversin cinemtica describe
la trayectoria que constituye el perfil de la leva (cuando el palpador es puntual) o la curva
offset al perfil (curva de paso o perfil terico de la leva) cuando el palpado es circular.
ngulo de presin: Es el ngulo entre la normal comn a los perfiles de la leva y del
palpador en el punto geomtrico de contacto y la direccin de la velocidad de dicho punto
del palpador. Si el palpador es de rodillo debe considerarse la direccin de la velocidad
de su centro.
.
Pgina
PROGRAMA EDUCATIVO: LICENCIATURA EN INGENIERA MECANICA
MANUAL DE PRCTICAS DE LA ASIGNATURA: DISEO DE MECANISMOS
Excentricidad: Es la distancia entre el eje a lo largo del cual se traslada el palpador y
el centro de rotacin de la leva. Su valor puede ser nulo ( = 0, palpador axial o
alineado). Slo est presente en palpadores con movimiento de traslacin.
Figura 5. Terminologa de los mecanismos de leva-palpador.
ESTUDIO CINEMTICO
Diagramas de desplazamientos.
El movimiento del palpador o rodillo, al recorrer una trayectoria obligada, es prefijado por
el tipo de perfil de la leva que se adopte, es decir, la ley del movimiento viene dada por el
perfil de la leva.
Al representar la ley de desplazamiento grficamente (Figura 6) en un sistema de
coordenadas, colocando la variable independiente en el eje de las abscisas y la variable
dependiente en el eje de las ordenadas, se obtiene el diagrama de desplazamiento.
En el diagrama de desplazamientos, se representan el desplazamiento angular o lineal
del palpador (eje de ordenadas) en funcin del desplazamiento angular o lineal de la leva
(eje de abscisas).
A partir del diagrama de desplazamientos, se determina el perfil de la leva:
Terico.
Real (Considerando el radio del rodillo).
Pgina
PROGRAMA EDUCATIVO: LICENCIATURA EN INGENIERA MECANICA
MANUAL DE PRCTICAS DE LA ASIGNATURA: DISEO DE MECANISMOS
Figura 6. Diagrama de desplazamientos de una leva de rotacin y palpador de translacin.
Curvas de acuerdo.
En el diagrama de desplazamientos deben trazarse curvas de acuerdo entre los
recorridos efectuados durante los perodos de subida, detencin y retorno (Figura 6). Las
curvas de acuerdo seguirn una trayectoria determinada segn el movimiento de que se
trate (dependiendo de la velocidad de giro de la leva).
MOVIMIENTO UNIFORME: Si se pretende que la elevacin del palpador provocada por
el giro 1 de la leva, se efecte con movimiento uniforme (velocidad constante), este
tramo de perfil de leva, tendr que venir representado en el diagrama por una recta. El
inconveniente de los choques de la transmisin entre tramos contiguos se puede
subsanar suavizando dichas uniones por medio de una lnea recta modificada (figura 7),
suavizando el desplazamiento por medio de un acuerdo de radio R. Velocidad de giro de
la leva, aproximadamente, 1000 rpm.
Figura 7. Curva descrita por el palpador durante un movimiento uniforme.
MOVIMIENTO UNIFORMEMENTE ACELERADO: La curva que produce un movimiento
parablico del palpador, y que lo caracteriza por su aceleracin constante, se obtiene por
el procedimiento geomtrico siguiente: se divide el segmento total de elevacin del
.
Pgina
PROGRAMA EDUCATIVO: LICENCIATURA EN INGENIERA MECANICA
MANUAL DE PRCTICAS DE LA ASIGNATURA: DISEO DE MECANISMOS
palpador en un nmero igual de partes igual al que ha dividido el eje de abscisas. Si, por
ejemplo, el nmero de divisiones es seis, en abscisas, el segmento total en ordenadas de
elevacin del palpador, se dividir tambin en seis segmentos, dando a cada uno de
stos una longitud proporcional a los nmeros 1, 3, 5, 5, 3, 1. Por estos puntos se
trazarn rectas horizontales, que cortarn a las correspondientes verticales por 1, 2, 3, 4,
5 en puntos, que unidos darn la curva de perfil parablico (Figura 8). Velocidad de giro
de la leva, entre 1000 y 6000 rpm.
Figura 8. Curva descrita por el palpador durante un movimiento uniformemente acelerado.
MOVIMIENTO ARMONICO: Para conseguir un movimiento armnico simple del palpador,
se har la siguiente construccin de perfil: tomando la elevacin del palpador, como
dimetro, se trazar una semicircunferencia, dividindola en un nmero de partes igual,
al que se ha dividido el eje de abscisas del diagrama, obteniendo as una serie de puntos
a partir de los que se trazarn rectas horizontales, que cortarn a las correspondientes
verticales trazadas por los puntos del eje de abscisas, en puntos de la curva del
diagrama de desplazamientos (Figura 9). La velocidad de giro de la leva puede ser mayor
de 1000 rpm.
Pgina
PROGRAMA EDUCATIVO: LICENCIATURA EN INGENIERA MECANICA
MANUAL DE PRCTICAS DE LA ASIGNATURA: DISEO DE MECANISMOS
Figura 9. Curva descrita por el palpador durante un movimiento armnico simple.
MOVIMIENTO CICLOIDAL: Se puede conseguir un movimiento cicloidal del palpador
generando una trayectoria similar a la descrita por un fasor complejo rodante, de radio r
= L/2, donde L es la elevacin requerida (Figura 10). Para construir la curva de
desplazamiento, se divide la ordenada cero en el mismo nmero de partes iguales que la
abscisa. Sea P el punto generador, coincidente con el punto O, en el inicio. Entonces,
cuando el crculo generador ruede verticalmente hacia arriba, a la tangencia con la
ordenada, por ejemplo en el punto 2, se traza una lnea horizontal por el punto P, en la
ordenada correspondiente al punto 2. Permite una velocidad de giro de la leva ms que
en los casos anteriores.
Pgina
PROGRAMA EDUCATIVO: LICENCIATURA EN INGENIERA MECANICA
MANUAL DE PRCTICAS DE LA ASIGNATURA: DISEO DE MECANISMOS
Figura 10. Curva descrita por el palpador durante un movimiento cicloidal.
ESTUDIO COMPARATIVO DE LOS DISTINTOS MOVIMIENTOS
En primer lugar, es necesario hacer constar que, aunque al disear un mecanismo de
levas es preciso estudiar con detenimiento los distintos diagramas de las funciones de
desplazamiento, velocidad, aceleracin y choque, que originen los perfiles estudiados, se
puede, no obstante, hacer una distincin previa entre mecanismos de alta y baja
velocidad ya que en los primeros, es fundamental el estudio de aceleraciones y choques,
por la posibilidad de rotura por fatiga, mientras que los proyectados para funcionar a
bajas velocidades solamente suele interesar el anlisis de desplazamientos y
velocidades.
Las conclusiones finales, tras el estudio de las ecuaciones analticas que definen el
movimiento, para cada uno de los tipos especificados, son las siguientes:
Mecanismos de levas, diseados para funcionar a baja velocidad, la curva de
acuerdo entre los tramos horizontales, correspondientes a los periodos de reposo
del palpador, debe adoptar un perfil uniforme y parablico.
Mecanismos de levas, diseados para altas velocidades de funcionamiento, el
perfil ms indicado ser cicloidal, debido a que la sobreaceleracin de primer
orden (choque), alcanza valores finitos, como puede observarse y consiguindose,
bajar el nivel de ruidos y prolongar la duracin del mecanismo.
En la figura 11 se ofrece el estudio comparativo, para diferentes caractersticas en
velocidad, de los comportamientos en aceleracin y choque o sobreaceleracin.
Uniforme
Parablico
Armnico
Cicloidal
VELOCIDAD
Pgina
PROGRAMA EDUCATIVO: LICENCIATURA EN INGENIERA MECANICA
MANUAL DE PRCTICAS DE LA ASIGNATURA: DISEO DE MECANISMOS
ACELERACIN
CHOQUE
Figura 11. Estudio comparativo de los diferentes tipos de movimientos.
ESTUDIO DINMICO.
Condicin de autorretencin.
La condicin de autorretencin determina el valor mximo de (ngulo de presin,
variable en cada instante) para que la leva no se autorretenga.
El citado ngulo est formado por la resultante de la fuerza debida al resorte, ms la de
inercia de la varilla, oponindose ambas al movimiento de sta, con la fuerza que define
la accin de la leva sobre la varilla.
El valor mximo de dicho ngulo (figura 12) se obtiene mediante un balance de fuerzas
sobre la varilla portadora del rodillo palpador, resultando la expresin:
.
Pgina
PROGRAMA EDUCATIVO: LICENCIATURA EN INGENIERA MECANICA
MANUAL DE PRCTICAS DE LA ASIGNATURA: DISEO DE MECANISMOS
Figura 12. Parmetros de una leva de rotacin con seguidor lineal de rodillo
a
2 x a 2 b
lim Angulo mximo de correccin
a Altura de la gua
Coeficiente de razonamiento
2b Ancho de la var illa
x Dis tan cia
tan lim
La frmula anterior se puede simplificar a:
tan lim
1 2
a
Considerando un razonamiento ( << 1) y que el trmino ( 2 2 b ) se aproxima a cero,
donde a y son fijos y x debe ser mnimo.
APLICACIONES PRCTICAS DE LAS LEVAS
rbol de levas para accionamiento de vlvulas en automocin.
En la figura 13 se muestran las partes de un accionamiento, con un rbol de levas de las
vlvulas de admisin y escape de un motor como los usados en automocin. La leva es
la encargada de abrir y cerrar las vlvulas de admisin y escape, durante el ciclo trmico
del motor del automvil.
.
Pgina
PROGRAMA EDUCATIVO: LICENCIATURA EN INGENIERA MECANICA
MANUAL DE PRCTICAS DE LA ASIGNATURA: DISEO DE MECANISMOS
Figura 13. Accionamiento de las vlvulas de admisin y escape con el rbol de levas.
Guiado de avance en sistemas mquina herramienta para destalonar fresas.
Para quitar material en el dorso y los lados de las fresas donde se quiera un perfil
constante de corte, se emplea un torno como el de la figura 14, donde el carro transversal
ha sido sustituido por el dispositivo que se muestra en la maqueta.
La leva hace avanzar radialmente la herramienta segn una cierta progresin para
hacerla retroceder bruscamente hasta su posicin inicial.
Figura 14. Mquina herramienta de destalonar fresas.
3. Objetivo General.
El desarrollo de esta prctica consistir en el estudio de perfiles de levas sobre una
maqueta simplificada que simula el mecanismo de accionamiento de una mquina o
herramienta para mecanizar tornillos a partir de una barra hexagonal.
.
Pgina
PROGRAMA EDUCATIVO: LICENCIATURA EN INGENIERA MECANICA
MANUAL DE PRCTICAS DE LA ASIGNATURA: DISEO DE MECANISMOS
4. Objetivos Especficos.
1) Comprobar el funcionamiento de un mecanismo real materializado en una
maqueta simplificada cuyo movimiento est basado en las LEVAS como elemento
mecnico de transmisin.
2) Aplicacin directa del estudio terico de levas realizando un estudio cinemtico
del movimiento de una leva que consistir en el desarrollo del diagrama de
desplazamientos y trazado de su perfil terico y real.
3) Estudio dinmico en levas con la obtencin del ngulo de autorretencin de una
de las levas que componen la maqueta.
5. Reactivos/insumos, materiales/utensilios y equipos.
G) REACTIVOS/INSUMOS.
CANTIDAD
DESCRIPCIN
CANTIDAD
DESCRIPCIN
Tornillos de cabeza hexagonal
ESPECIFICACIONES
NO APLICA
NO APLICA
H) MATERIALES/UTENSILIOS.
I)
CANTIDAD
ESPECIFICACIONES
Que sean de diferentes
cuerdas.
OBS.
OBS.
El alumno
debe traer el
equipo
EQUIPOS/INSTRUMENTOS.
DESCRIPCIN
Cmara fotogrfica digital
ESPECIFICACIONES
De mnimo 12mpx Lcd 2.4
Bateria Litio 6xzoom Bfn.
Herramienta para mecanizar tornillos
Calibrador vernier digital
Micrmetro digital 25 a 50 mm
Micrmetro digital para medir roscas de
Accionamiento
de
una
mquina herramienta, para
mecanizar tornillos a partir
de una barra hexagonal.
Que contenga medidas del
sistema internacional y
sistema ingls. Marca
Mitutoyo
Que contenga medidas del
sistema internacional
sistema ingls. Marca
Mitutoyo
Que contenga medidas del
OBS.
El
alumno
debe traer la
cmara
fotogrfica
El equipo lo
proporciona
la institucin
El equipo lo
proporciona
la institucin
El equipo lo
proporciona
la institucin
El equipo lo
Pgina
PROGRAMA EDUCATIVO: LICENCIATURA EN INGENIERA MECANICA
MANUAL DE PRCTICAS DE LA ASIGNATURA: DISEO DE MECANISMOS
25 a 50 mm
1
Gonimetro
sistema internacional
sistema ingls. Marca
Mitutoyo
Para medicin de ngulos.
Marca Mitutoyo
proporciona
la institucin
El equipo lo
proporciona
la institucin
6. Desarrollo de la Actividad Prctica.
DESCRIPCIN DEL MECANISMO.
Se parte de una maqueta (figura 15) que simula el mecanismo de accionamiento de una
mquina herramienta para mecanizar tornillos a partir de una barra hexagonal, en la que
se ha prescindido del sistema de alimentacin de la barra-pieza, as como del movimiento
relativo de rotacin pieza-herramienta.
Pgina
PROGRAMA EDUCATIVO: LICENCIATURA EN INGENIERA MECANICA
MANUAL DE PRCTICAS DE LA ASIGNATURA: DISEO DE MECANISMOS
Figura 15. Reproduccin a escala de una mquina de generar tornillos.
Un eje motor (simulado por la manivela de entrada), acciona simultneamente cada una
de las cuatro levas (tres planas y una cilndrica) cuya misin se explicar a continuacin.
Las operaciones a realizar para la realizacin del tornillo son tres: cilindrar (en dos
pasos), roscar y cortar (figura 16).
Figura 16. Herramientas de cilindrado, corte y roscado y dimensiones del tornillo.
La intervencin de cada uno de los tiles, que efectan las operaciones de cilindrar,
roscar y cortar, viene posibilitada por la actuacin de la leva correspondiente, donde cada
leva ha sido colocada debidamente para intervenir segn una determinada secuencia y
cuyo perfil ha sido determinado para cumplir su funcin.
Las funciones de cilindrar, roscar y cortar sern guiadas por levas planas, mientras que el
.
Pgina
PROGRAMA EDUCATIVO: LICENCIATURA EN INGENIERA MECANICA
MANUAL DE PRCTICAS DE LA ASIGNATURA: DISEO DE MECANISMOS
posicionamiento de la barra vendr determinado por una leva espacial cilndrica.
Las distintas fases del proceso de fabricacin del tornillo vienen condicionadas por los
desplazamientos de los palpadores sobre las levas lo que conlleva una cuidada
secuenciacin (figura 17).
Las fases, durante un ciclo completo, son las siguientes:
01
Acercamiento de la herramienta a cilindrar
15
Primer paso del cilindrado
5 5
Separacin de la herramienta a cilindrar
5 - 6
Colocacin de la pieza
6 6
Acercamiento de la herramienta a cilindrar
6 - 10
Segundo paso de cilindro
10 - 11
Separacin herramienta a cilindrar
11 11
Acercamiento de la herramienta de roscar y colocacin de la pieza
11 - 15
Roscado
15 - 16
Separacin de la herramienta de roscado
16 16
Acercamiento de la herramienta de cortar y colocacin de pieza
16 - 20
Cortar
20 - 21
Separacin de la herramienta de cortar
21 - 22
Colocacin de la pieza
22 - 24
Previsto para el avance de la pieza
Leva plana de cilindro
Pgina
PROGRAMA EDUCATIVO: LICENCIATURA EN INGENIERA MECANICA
MANUAL DE PRCTICAS DE LA ASIGNATURA: DISEO DE MECANISMOS
Leva plana de rosca
Leva plana de cortar
Leva cilndrica de la pieza
Figura 17. Curvas de desplazamientos de las cuatro levas.
MTODO OPERATIVO
Para la correcta realizacin de la prctica, se deben desarrollar los siguientes
puntos:
1. Comprobar detenidamente sobre la maqueta las distintas fases de fabricacin de
tornillos a partir de una barra hexagonal, que fueron ampliamente explicadas en el
apartado referente a los objetivos de la prctica, y que se resumen en:
Cilindrado en dos pasos (leva verde)
Roscado (leva azul)
Cortar (leva roja)
Acercamiento de la pieza (leva cilndrica)
2. Dibujar el diagrama de desplazamientos en la leva de cilindrar (verde), a partir de
los puntos ms representativos, considerando que el seguidor efecta un
movimiento de aceleracin constante
3. A partir del diagrama anterior, determinar grficamente el perfil terico y real de
.
Pgina
PROGRAMA EDUCATIVO: LICENCIATURA EN INGENIERA MECANICA
MANUAL DE PRCTICAS DE LA ASIGNATURA: DISEO DE MECANISMOS
dicha leva
4. Calcular el mximo ngulo de presin en la leva de roscar (azul), utilizando la
frmula especificada en el apartado referente al estudio dinmico de levas
ELABORACIN Y ANLISIS DE LOS RESULTADOS
La obtencin de los resultados correspondientes a los enunciados anteriores se llevar a
cabo del siguiente modo:
1.
Para comprobar las fases del proceso de fabricacin se deber accionar el
mecanismo mediante una manivela situada en la maqueta que lleva incorporada
una aguja indicadora del nmero de grados girada por sta, que al ser solidaria
con el eje rgidamente unido a las distintas levas que consta el mecanismo nos
dar valores necesarios para la construccin del diagrama de desplazamientos y
del perfil de la leva.
2.
La realizacin del diagrama de desplazamientos se realizar tomando como
valores de giro p de la varilla seguidora los correspondientes a giros de la leva ( )
de 15 en 15, que se medirn en el disco graduado, tomando adems aquellos
otros puntos del perfil que sean significativos aunque no coincidan
especficamente con la divisin anterior.
Los valores de p se calculan mediante un mtodo aproximado, basado en el
teorema del coseno, aplicado al tringulo formado por la varilla rgidamente unida
al eje, portadora de la herramienta de cilindrar, y el lado de longitud constante
cuyos extremos son el apoyo de la herramienta y el centro del eje anterior. De este
modo, los puntos representativos se obtendrn fcilmente, construyendo la tabla
de resultados que se muestra en la siguiente pgina, donde:
L0 (mm): Longitud inicial de la varilla portadora de la herramienta de cilindrar (leva
verde), desde el apoyo de la misma al extremo de la herramienta, entendiendo por
inicial la medida cuando la aguja marque 0 en el disco graduado.
Li (mm): Valores sucesivos de la distancia desde ese apoyo al extremo de la
varilla, para las distintas posiciones angulares de la leva, es decir para los
distintos valores de .
R (mm): Longitud de la varilla solidaria al eje (se supone constante para todas las
posiciones de leva).
No.
De
medida
()
L0 (mm):
Li (mm):
P (rad ) Li L0
P ()
1
2
Pgina
PROGRAMA EDUCATIVO: LICENCIATURA EN INGENIERA MECANICA
MANUAL DE PRCTICAS DE LA ASIGNATURA: DISEO DE MECANISMOS
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
3. La determinacin grfica del perfil se lleva a cabo con el proceso dibujo siguiente:
Trazar una circunferencia de radio OpOl (Distancia del centro de la leva al punto
de apoyo de la varilla que porta el rodillo seguidor) y situar el seguidor en uno de
los puntos de la circunferencia.
Trazar una circunferencia con el radio bsico del perfil terico de la leva .
Dividir la circunferencia en un nmero de partes graduadas igual al nmero al
elegido.
Trazar la varilla L desde Op a la circunferencia bsica.
Con centro en Op y radio L, trazar un arco y situar en l los ngulos p calculados.
Llevar circunferencias con centro en Ol desde cada uno de los ngulos p del arco
interior y obligar a la varilla L a ir siguiendo a la leva, en cada uno de los
sectores en ese que se dividi la circunferencia, sealando esos puntos como los
significativos del perfil terico de la leva.
El perfil real se obtiene restndole al anterior el radio del rodillo.
Pgina
PROGRAMA EDUCATIVO: LICENCIATURA EN INGENIERA MECANICA
MANUAL DE PRCTICAS DE LA ASIGNATURA: DISEO DE MECANISMOS
4. Aplicacin directa de la frmula siguiente a la leva de roscar (leva azul):
tan lim
1
x
1 2
a
EJEMPLO
Determinar el perfil terico y real de una leva de rotacin con gua circular, cuyo seguidor
de rodillo adquiere un movimiento uniforme acelerado. Tomar, como mnimo, 12 puntos de
precisin equidistantes.
En la rotacin de la leva:
De 0 a 120, la varilla gira 15 elevndose
De 120 a 180, la varilla permanece en reposo
De 180 a 270, gira otros 15 elevndose
De 270 a 360, desciende 30 hasta la posicin inicial.
Datos:
Distancia entre centros de rotacin de leva y varilla: 80 mm.
Longitud de varilla: 60 mm.
Radio circunferencia bsica del perfil terico: 34 mm
Radio rodillo: 3 mm.
Figura 18. Diagrama de desplazamientos (ley de la leva).
Pgina
PROGRAMA EDUCATIVO: LICENCIATURA EN INGENIERA MECANICA
MANUAL DE PRCTICAS DE LA ASIGNATURA: DISEO DE MECANISMOS
Figura 19. Perfil terico y real de la leva.
7. Cuestionario.
1.- Comprobar detenidamente sobre la maqueta las distintas fases de fabricacin de
tornillos a partir de una barra hexagonal, que fueron ampliamente explicadas en el
apartado referente a los objetivos de la prctica, y que se resumen en:
.
Pgina
PROGRAMA EDUCATIVO: LICENCIATURA EN INGENIERA MECANICA
MANUAL DE PRCTICAS DE LA ASIGNATURA: DISEO DE MECANISMOS
Cilindrado en dos pasos (leva verde)
Roscado (leva azul)
Cortar (leva roja)
Acercamiento de la pieza (leva cilndrica)
2.- Dibujar el diagrama de desplazamientos en la leva de cilindrar (verde), a partir de los
puntos ms representativos, considerando que el seguidor efecta un movimiento de
aceleracin constante (analizar primero el ejemplo de las pginas 22 y 23).
3.- A partir del diagrama anterior, determinar grficamente el perfil terico y real de dicha
leva.
4.- Calcular el ngulo de autor retencin en la leva de roscar (azul), utilizando la frmula
especificada en el apartado referente al estudio dinmico de levas y sabiendo que el
coeficiente de rozamiento es = 0,4.
8. Bibliografa
1. Mabie, H. H. and Reinholtz. C. F. (2005). Mecanismo y Dinmica de Maquinaria. D.F.,
Mxico: Limusa
2. Myszka, D. H. (2012). Mquinas y Mecanismos. Edo de Mxico, Mxico: Pearson
Education.
3. Calero, P. R., Carta, J. A. (1999). Fundamentos de Mecanismos y Mquinas para
Ingenieros. Madrid, Espaa: McGraw-Hill.
4. Derrick, W. R. (1987). Variable Compleja con Aplicaciones. D. F., Mxico: Grupo Editorial
Iberoamrica.
5. Doughtie, V. L., James, W. H. (1986). Elementos de Mecanismos. D. F., Mxico: CECSA.
6. Erdman, A. G. y Sandor, G. N. (1998). Diseo de Mecanismos, Anlisis y Sntesis. D. F.,
Mxico: Prentice Hall.
7. Norton, R. L. (2000). Diseo de Maquinaria. Estado de Mxico: Mxico: Prentice Hall.
8. Juvinall, R. C., and Marshek, K. M. (1991). Fundamentals of Machine Component Design.
New York, US: John Wiley & Sons.
9. Norton, R. L. (1999). Design of Machinery: An Introduction tho the Synthesis and Analysis
of Mechanisms and Mechines. New York, US: McGraw-Hill.
Pgina
PROGRAMA EDUCATIVO: LICENCIATURA EN INGENIERA MECANICA
MANUAL DE PRCTICAS DE LA ASIGNATURA: DISEO DE MECANISMOS
9. Formato y especificacin del reporte de prctica.
a)
b)
c)
d)
e)
f)
g)
Introduccin
Objetivo
Desarrollo de la actividad prctica
Resultados
Discusin
Cuestionario
Bibliografa
1. Identificacin.
.
Pgina
PROGRAMA EDUCATIVO: LICENCIATURA EN INGENIERA MECANICA
MANUAL DE PRCTICAS DE LA ASIGNATURA: DISEO DE MECANISMOS
NOMBRE
PRCTICA 4. NOMENCLATURA
DE LA PRCTICA:
No. DE PRCTICA:
Y TALLADO DE DIENTES
DE ENGRANES
NO. DE INTEGRANTES MXIMO POR EQUIPO:
NO. DE SESIONES:
2. Introduccin.
El desarrollo de esta prctica consistir en la simulacin del procedimiento de talla de
una rueda dentada mediante la generacin de los dientes del perfil de evolvente, con una
maqueta construida para tal fin (figura 1).
Figura 1. Odontgrafo o generador de dientes de engranaje de perfil evolvente.
Condicin de engrane
Dos ruedas dentadas engranando entre s forman un par superior, en el que los dientes
.
Pgina
PROGRAMA EDUCATIVO: LICENCIATURA EN INGENIERA MECANICA
MANUAL DE PRCTICAS DE LA ASIGNATURA: DISEO DE MECANISMOS
de una de las ruedas empujan a los de la otra del mismo modo que una leva empuja a un
palpador.
Figura 2. Condicin de perfiles conjugados.
Para que la relacin de transmisin permanezca constante es necesario que el centro de
rotacin sea un punto fijo, es decir, que la normal a la superficie de los dientes en su
punto de contacto, que llamamos lnea de presin, debe pasar en cualquier posicin por
un punto fijo de la lnea de centros. A los perfiles que cumplen esta condicin les
llamamos perfiles conjugados (figura 2)
Adems existe una condicin geomtrica que establece el tamao de los dientes. Para
que dos ruedas dentadas puedan engranar deben tener el mismo paso p o lo que es lo
mismo, el mismo mdulo m, ya que p = m
El perfil del diente de engranajes paralelos
La condicin de engrane impone que los perfiles de los dientes de las dos ruedas que
forman el engranaje deben ser conjugados.
Para cualquier perfil que tengan los dientes de una rueda, siempre habr un perfil para
los de la otra rueda que sea conjugado del primero. Este perfil puede encontrarse
.
Pgina
PROGRAMA EDUCATIVO: LICENCIATURA EN INGENIERA MECANICA
MANUAL DE PRCTICAS DE LA ASIGNATURA: DISEO DE MECANISMOS
fcilmente sabiendo que el movimiento del engranaje equivale al de un cilindro rodando
sobre otro sin deslizar.
Por ejemplo, supongamos dos cilindros de cartn, sobre uno de ellos se ha pegado otro
trozo de cartn con la forma del diente. Ahora se mantiene uno de los cartones quieto y el
otro con el diente se hace rodar sobre l (figura 3).
El diente va tomando distintas posiciones sobre el cartn fijo. Si con un lpiz se dibujan
sobre el cartn fijo las sucesivas posiciones del diente, se obtiene una familia de curvas.
Estas curvas se envuelven a otra curva que es el perfil del diente conjugado. En efecto,
ambos perfiles se tocan entre s en todas las posiciones, y al mismo tiempo cumplen la
condicin de que sus superficies primitivas sean dos cilindros circulares.
Figura 3. Generacin del perfil del diente conjugado.
En todas las posiciones la normal a los dos perfiles en el punto de contacto ( P) pasar
por el centro instantneo relativo ( I).
Este mtodo para encontrar dos perfiles conjugados se llama mtodo de generacin y,
segn se ver, constituye la base de la talla de perfiles por generacin. En las talladoras
de engranajes, el diente de cartn de la figura 3 se convierte en una herramienta de
bordes constantes que, adems del anterior movimiento de rodadura, tiene un
movimiento de vaivn perpendicular al plano del papel. En cada vaivn la herramienta
corta un trozo del hueco entre dientes de la rueda que est tallando.
El mismo mtodo de generacin permite ver que la nica limitacin que existe para
encontrar un perfil conjugado de otro, es que exista la anterior evolvente. Si el perfil es
convexo en todos sus puntos siempre admite una evolvente. Si es cncavo en algn
punto, el radio de curvatura de esta concavidad debe ser mayor que ( IP). Para ser
.
Pgina
PROGRAMA EDUCATIVO: LICENCIATURA EN INGENIERA MECANICA
MANUAL DE PRCTICAS DE LA ASIGNATURA: DISEO DE MECANISMOS
utilizables como dientes de una engranaje estos dos perfiles deben cumplir, adems, la
condicin de ser totalmente exteriores, uno al otro, en cualquier posicin.
Lnea de engrane y zona de engrane
Dado un engranaje, si consideramos un diente de una de las ruedas en contacto con otro
diente de la otra, llamaremos lnea de engrane al lugar geomtrico de las sucesivas
posiciones del punto de contacto de ambos dientes, que como ya se ha dicho, deben ser
perfiles conjugados.
Definimos como zona de engrane la porcin de espacio comprendida entre los crculos
de cabeza de las dos ruedas. Es la zona en la que entran en contacto las dos partes
dentadas de las ruedas.
El engrane de dos dientes empieza cuando la cabeza del diente conducido alcanza la
lnea de engrane, y termina cuando alcanza la cabeza del diente conductor (punto W y
WT) (figura 4).
Figura 4. Lnea de engrane y zona de engrane.
Si no existe rozamiento el empuje de un diente sobre otro es perpendicular a ambos en el
punto de contacto P, de modo que tiene la direccin de la recta PI, llamada por esto lnea
de presin. Esta recta forma con la tangente comn a las circunferencias primitivas de las
ruedas, un ngulo , llamado ngulo de presin (figura 5). Es decir, el empuje de una
.
Pgina
PROGRAMA EDUCATIVO: LICENCIATURA EN INGENIERA MECANICA
MANUAL DE PRCTICAS DE LA ASIGNATURA: DISEO DE MECANISMOS
rueda sobre otra pasa siempre por el centro relativo I, con un ngulo de presin .
Figura 5. Lnea de engrane y ngulo de presin.
En general el ngulo de presin es variable a lo largo del engrane de un mismo diente.
En ruedas dentadas rpidas, esto constituye un inconveniente grave, pues el hecho que
el empuje de una rueda sobre otra cambie continuamente de direccin, produce
vibraciones y sacudidas en los apoyos. Las nicas dentaduras en las que el ngulo de
presin es constante son las de perfil evolvente.
Deslizamiento de los dientes
Los dientes en contacto ruedan y deslizan uno sobre el otro durante el movimiento. Para
que no existiera deslizamiento, y que el movimiento relativo fuera de rodadura pura, sera
necesario que el punto de contacto ( P) coincidiera en todo momento con el centro
instantneo relativo (I). Dado que el punto de contacto va recorriendo la lnea de
engrane, siempre existe una posicin en que coincide con el centro instantneo. En esta
posicin no existe deslizamiento. Pero en cualquier otra posicin si existe.
Cuanto ms lejos de ( I) se realice el contacto, mayor ser el deslizamiento. Este
deslizamiento produce desgaste en los dientes, prdidas de potencia y calentamiento.
Conviene por lo tanto reducirlo al mnimo, para lo cual hay que mantener la distancia ( IP)
dentro de unos lmites lo ms pequeos posibles. De todos modos es imposible
suprimirlo totalmente. Para ello sera necesario que el contacto entre las dos ruedas se
.
Pgina
PROGRAMA EDUCATIVO: LICENCIATURA EN INGENIERA MECANICA
MANUAL DE PRCTICAS DE LA ASIGNATURA: DISEO DE MECANISMOS
realizara permanentemente en el centro instantneo relativo ( I), lo cual slo ocurre en
dos ruedas de friccin. En las ruedas dentadas es imposible mantener constante la
relacin de transmisin, y suprimir el deslizamiento al mismo tiempo.
El perfil de evolvente
Aunque se ha dicho que el perfil del diente podra ser cualquiera, mientras existiera su
conjugado, vamos a describir el perfil de evolvente que, por sus grandes ventajas, es la
forma de los dientes de la mayor parte de los engranajes normalizados.
Una evolvente de crculo es la curva que dibuja el extremo de un hilo al desenrollarse de
un carrete (figura 6).
Figura 6. Formacin de la evolvente.
Para comprender el funcionamiento de los engranajes de perfil de evolvente, imaginemos
un hilo que se desenrolla de un carrete y se enrolla en el otro. Estos carretes no
permanecen fijos sino que giran sobre s mismos a medida que avanza el hilo.
Imaginemos tambin pegado a cada carrete, en la direccin del plano de la figura, un
cartn ms grande que el carrete y que gira con l (figura 7). Un punto determinado ( P)
del hilo, al pasar de un carrete al otro, dibuja sobre estos cartones dos evolventes de
crculo que giran por lo tanto con sus correspondientes carretes. Como estas dos curvas
son siempre normales al hilo, resultan tangentes entre s todas las posiciones. Si ahora
recortamos los dientes que tengan este perfil, en los cartones, se comprende que
haciendo engranar estos dos dientes se reproduce el mismo movimiento que al estirar el
hilo.
Pgina
PROGRAMA EDUCATIVO: LICENCIATURA EN INGENIERA MECANICA
MANUAL DE PRCTICAS DE LA ASIGNATURA: DISEO DE MECANISMOS
Figura 7. Formacin de las dos evolventes.
Una pareja de dientes conjugados tiene las siguientes propiedades:
a. La lnea de engrane ser la lnea recta entre los puntos T1 y T2, o sea el anterior
hilo imaginario. En efecto, segn vimos, el punto de contacto (P) se encuentra
siempre sobre dicho hilo.
b. La lnea de empuje coincide en todas las posiciones con la lnea de engrane.
c. El ngulo de presin es constante a lo largo del engrane.
d. Si el ngulo de presin es constante se eliminan vibraciones y ruidos.
e. Cualquier dentadura de evolvente puede engranar con cualquier otra y con
cualquier distancia entre centros, si tienen el mismo paso, pues los perfiles de
evolvente siempre sern conjugados. Esto permite una gran versatilidad en los
acoplamientos de ruedas y en los procedimientos de tallado.
Gracias a estas ventajas puede decirse que las ruedas dentadas con dientes de perfil de
evolvente son la solucin ms perfecta que existe para los engranajes de transmisin de
potencia. Sin embargo, en algunas aplicaciones, tales como las bombas de engranajes y
los mecanismos de relojera, donde no se busca la transmisin de potencia se emplean
otros tipos de perfiles conjugados (por ejemplo, cicloidales), que permiten satisfacer
condiciones particulares.
NOMENCLATURA
Nmero de dientes de la rueda, Z .
Paso, p: Distancia entre puntos homlogos de dos perfiles consecutivos de una misma
rueda, medida sobre la circunferencia primitiva de referencia. Para que dos ruedas
engranen deben tener el mismo paso.
Mdulo, m: Cociente entre el dimetro primitivo de referencia y el nmero de dientes.
.
Pgina
PROGRAMA EDUCATIVO: LICENCIATURA EN INGENIERA MECANICA
MANUAL DE PRCTICAS DE LA ASIGNATURA: DISEO DE MECANISMOS
Dos ruedas engranan si tienen el mismo mdulo.
Paso diametral (diametral pitch), dp: Cociente entre el nmero de dientes y el dimetro
primitivo de referencia expresado en pulgadas.
Figura 8. Representacin de los principales parmetros de un engranaje.
Circunferencia de cabeza, ra: Circunferencia que limita los dientes por su parte superior.
Circunferencia de pie, rf: Circunferencia que limita el hueco entre dientes por su parte
inferior. El hueco debe ser suficientemente profundo para dejar pasar la cabeza de los
dientes de la otra rueda.
Altura de cabeza o adendo, ha: Distancia radial entre la circunferencia primitiva y la
cabeza del diente.
Altura de pie o dedendo, hf: Distancia radial entre la raz del diente y la circunferencia
primitiva.
Altura total, h: Suma de la altura de cabeza y la de pie.
Holgura o juego circunferencial: Espacio que queda al acoplar una pareja de dientes.
Es necesaria para permitir la deflexin de los dientes, el paso del lubricante y la
expansin trmica.
.
Pgina
PROGRAMA EDUCATIVO: LICENCIATURA EN INGENIERA MECANICA
MANUAL DE PRCTICAS DE LA ASIGNATURA: DISEO DE MECANISMOS
Huelgo o juego en cabeza, c: Espacio que dejan una pareja de dientes al engranar,
entre la cabeza del diente y el fondo del espacio interdental de la rueda conectada. Suele
valer: 0,25 m.
Altura de trabajo, hw: Diferencia entre la altura total del diente y el juego.
Espesor, s: Espesor del diente, medido sobre la circunferencia primitiva.
Hueco, e: Hueco entre dientes, medido sobre la circunferencia primitiva.
Cara: Parte de la superficie del diente que queda entre la circunferencia primitiva y la de
cabeza.
Flanco: Parte de la superficie de un diente que queda entre la circunferencia primitiva y
la de pie.
Anchura de flanco, b: Anchura del diente medida en direccin paralela a la del eje.
20
25
Figura 9. Perfil de referencia del dentado y de la herramienta.
14.5
Pgina
PROGRAMA EDUCATIVO: LICENCIATURA EN INGENIERA MECANICA
MANUAL DE PRCTICAS DE LA ASIGNATURA: DISEO DE MECANISMOS
PERFIL DE REFERENCIA.
Cremallera de referencia: til de corte ficticio que se empleara para generar los dientes
de un engranaje con dimensiones normalizadas.
Perfil de referencia: Seccin normal de la cremallera de referencia. Se emplea para
definir las dimensiones normalizadas del dentado.
Las dimensiones del perfil de referencia y de las herramientas asociada a l estn
normalizadas (tabla 1 y figura 10).
rb r cos 0
rb r cos
Figura 10. Representacin de una cremallera normalizada para la generacin de dientes de engranajes.
Tabla 1. Parmetros normalizados de un engranaje.
PARMETROS
Perfil de Referencia
Normalizado
ngulo de presin de referencia
0 20
Pgina
PROGRAMA EDUCATIVO: LICENCIATURA EN INGENIERA MECANICA
MANUAL DE PRCTICAS DE LA ASIGNATURA: DISEO DE MECANISMOS
Altura de cabeza del dentado
Altura de pie del dentado
Altura de trabajo
Juego de cabeza
Altura total del dentado
Espesor
Hueco
ha m
h f ha 0 1.25m
hW 2m
c 0.25m
h 2.25m
s m
e m
3. Objetivo General.
El objetivo de esta prctica ser determinar el diseo terico y prctico adecuado de un engrane empleando
la cinemtica de la teora de dientes (ley fundamental de engranaje) de engrane, que sern sometidos a
cambios de velocidad o par de torsin en un dispositivo rotario.
4. Objetivos Especficos.
1.- Comprender y analizar el diseo de los dientes de un engrane
2.- Analizar la resistencia de materiales y los estados de esfuerzos que estn sometidos
los dientes del engrane
5. Reactivos/insumos, materiales/utensilios y equipos.
J) REACTIVOS/INSUMOS.
CANTIDAD
No aplica
CANTIDAD
DESCRIPCIN
ESPECIFICACIONES
No Aplica
No Aplica
K) MATERIALES/UTENSILIOS.
OBS.
No Aplica
DESCRIPCIN
Engranes rectos
ESPECIFICACIONES
Que sean de diferente
dimetro y diferente
cantidad de dientes
OBS.
El alumno
debe traer
los engranes
Pin y cremallera
Que concuerden en el
desplazamiento del dentado
Pao o franela
Para limpieza
El alumno
debe traer el
pin y la
cremallera
El alumno
debe traer el
Pgina
PROGRAMA EDUCATIVO: LICENCIATURA EN INGENIERA MECANICA
MANUAL DE PRCTICAS DE LA ASIGNATURA: DISEO DE MECANISMOS
pao o
franela
L)
CANTIDAD
EQUIPOS/INSTRUMENTOS.
DESCRIPCIN
Odontgrafo
Calibrador vernier digital
Micrmetro digital 25 a 50 mm
Micrmetro digital para exteriores de 175
a 200 mm
Gonimetro
ESPECIFICACIONES
Generador de dientes de
engranaje de perfil
evolvente.
Que contenga medidas del
sistema internacional y
sistema ingls. Marca
Mitutoyo
Que contenga medidas del
sistema internacional
sistema ingls. Marca
Mitutoyo
Que contenga medidas del
sistema internacional
sistema ingls. Marca
Mitutoyo
Para medicin de ngulos.
Marca Mitutoyo
OBS.
El equipo lo
proporciona
la institucin
El equipo lo
proporciona
la institucin
El equipo lo
proporciona
la institucin
El equipo lo
proporciona
la institucin
El equipo lo
proporciona
la institucin
6. Desarrollo de la Actividad Prctica.
1. Dibujar el perfil de los dientes (Ruedas a cero)
Datos:
Re, radio del sector.
m, mdulo
Z, nmero de dientes
R= m Z/2
Operaciones a realizar, siguiendo el orden que se indica a continuacin:
a. Centrar el sector
b. Aflojar tornillos (de fijacin de la cremallera).
c. Desplazar la cremallera, una magnitud d (d 10 cm).
d. Apretar tornillos
e. Dibujar el perfil de los dientes en una sucesin de posiciones, mediante pequeos
desplazamientos de cremallera.
f. Observar si el perfil del diente ha sido penetrado.
2. Eliminar la penetracin del diente de la talla.
Se proceder de la siguiente manera.
.
Pgina
PROGRAMA EDUCATIVO: LICENCIATURA EN INGENIERA MECANICA
MANUAL DE PRCTICAS DE LA ASIGNATURA: DISEO DE MECANISMOS
a. Se calcular el desplazamiento de la cremallera de talla x, m.
b. Se efectuar dicho desplazamiento, previo centrado del sector.
c. Posicionada la cremallera (apretando los tornillos de fijacin), se dibujar el nuevo
perfil de los dientes.
d. Comprobar la correccin de la penetracin.
3.- Calcular:
En los dos apartados anteriores se proceder a determinar:
Espesor del diente.
Circunferencia de cabeza.
7. Cuestionario.
1.- Un engrane recto de involuta de profundidad total a 20, con 18 dientes, que tiene un
paso diametral de 12 in.
a) El dimetro del crculo de paso.
b) El dimetro del crculo de la base.
c) El modulo.
d) El paso de la base.
e) El paso circular
2.- Un engrane recto de involuta de profundidad total a 20, con 48 dientes, que tiene un
paso diametral de 8 in.
a) El dimetro del crculo de paso.
b) El dimetro del crculo de la base.
c) El modulo.
d) El paso de la base.
e) El paso circular
3.- Un engrane recto de involuta de profundidad total a 14 , con 40 dientes, que tiene
un paso diametral de 16 in.
a) El dimetro del crculo de paso.
b) El dimetro del crculo de la base.
c) El modulo.
d) El paso de la base.
e) El paso circular
4.- Un engrane recto a 25, con 21 dientes, que tiene un mdulo mtrico de 4 mm.
a) El dimetro del crculo de paso.
b) El dimetro del crculo de la base.
.
Pgina
PROGRAMA EDUCATIVO: LICENCIATURA EN INGENIERA MECANICA
MANUAL DE PRCTICAS DE LA ASIGNATURA: DISEO DE MECANISMOS
c) El paso circular
d) El paso de la base.
5.- Dos engranes rectos de involuta de profundidad total a 20, con paso de 12, que se
utiliza en una sierra circular industrial para cortar madera. El pin tiene 18 dientes y el
engrane, 42
a) La distancia entre centros
b) La razn de contacto
6.- Dos engranes rectos de involuta de profundidad total a 20, con paso igual a 4, se
utilizan en una volteadora para eliminar la rebabas de acero de partes troqueladas. El
pin tiene 12 dientes y el engrane, 28
a) La distancia entre centros
b) La razn de contacto
7- Dos engranes rectos de involuta de profundidad total a 20, con paso de 12, que se
utiliza en una sierra circular industrial para cortar madera. El pin tiene 18 dientes y el
engrane, 42
a) Determine si hay interferencia
8.- Dos engranes rectos de involuta de profundidad total a 20, con paso igual a 4, se
utilizan en una volteadora para eliminar la rebabas de acero de partes troqueladas. El
pin tiene 12 dientes y el engrane, 28
c) Determine si hay interferencia
9.- Selecciona un par de engranes de acero dulce, a 20, para una aplicacin donde se
necesita transmitir 1 hp. El pin impulsa a 1725 rpm y el engrane debe girar tan cerca
como sea posible de 560 rpm. Determine el conjunto adecuado de engranes. Paso
diametral de 16.
10.- Selecciona un par de engranes de acero dulce, a 20, para una aplicacin donde se
necesita transmitir 10 hp. El pin impulsa a 1175 rpm y el engrane debe girar tan cerca
como sea posible de 230 rpm. Determine el conjunto adecuado de engranes. Paso
diametral de 6.
8. Bibliografa
1. Mabie, H. H. and Reinholtz. C. F. (2005). Mecanismo y Dinmica de Maquinaria. D.F.,
Mxico: Limusa
2. Myszka, D. H. (2012). Mquinas y Mecanismos. Edo de Mxico, Mxico: Pearson
.
Pgina
PROGRAMA EDUCATIVO: LICENCIATURA EN INGENIERA MECANICA
MANUAL DE PRCTICAS DE LA ASIGNATURA: DISEO DE MECANISMOS
3.
4.
5.
6.
7.
8.
9.
Education.
Calero, P. R., Carta, J. A. (1999). Fundamentos de Mecanismos y Mquinas para
Ingenieros. Madrid, Espaa: McGraw-Hill.
Derrick, W. R. (1987). Variable Compleja con Aplicaciones. D. F., Mxico: Grupo Editorial
Iberoamrica.
Doughtie, V. L., James, W. H. (1986). Elementos de Mecanismos. D. F., Mxico: CECSA.
Erdman, A. G. y Sandor, G. N. (1998). Diseo de Mecanismos, Anlisis y Sntesis. D. F.,
Mxico: Prentice Hall.
Norton, R. L. (2000). Diseo de Maquinaria. Estado de Mxico: Mxico: Prentice Hall.
Juvinall, R. C., and Marshek, K. M. (1991). Fundamentals of Machine Component Design.
New York, US: John Wiley & Sons.
Norton, R. L. (1999). Design of Machinery: An Introduction tho the Synthesis and Analysis
of Mechanisms and Mechines. New York, US: McGraw-Hill.
9. Formato y especificacin del reporte de prctica.
a)
b)
c)
d)
e)
f)
g)
Introduccin
Objetivo
Desarrollo de la actividad prctica
Resultados
Discusin
Cuestionario
Bibliografa
Pgina
PROGRAMA EDUCATIVO: LICENCIATURA EN INGENIERA MECANICA
MANUAL DE PRCTICAS DE LA ASIGNATURA: DISEO DE MECANISMOS
1. Identificacin.
NOMBRE
PRCTICA 5. CALCULO
DE LA PRCTICA:
No. DE PRCTICA:
DEL MOVIMIENTO DE TRENES DE
ENGRANE
NO. DE INTEGRANTES MXIMO POR EQUIPO:
NO. DE SESIONES:
2. Introduccin.
.
Condicin de engrane
Dos ruedas dentadas engranando entre s forman un par superior, en el que los dientes
de una de las ruedas empujan a los de la otra del mismo modo que una leva empuja a un
palpador.
Pgina
PROGRAMA EDUCATIVO: LICENCIATURA EN INGENIERA MECANICA
MANUAL DE PRCTICAS DE LA ASIGNATURA: DISEO DE MECANISMOS
Figura 2. Condicin de perfiles conjugados.
Para que la relacin de transmisin permanezca constante es necesario que el centro de
rotacin sea un punto fijo, es decir, que la normal a la superficie de los dientes en su
punto de contacto, que llamamos lnea de presin, debe pasar en cualquier posicin por
un punto fijo de la lnea de centros. A los perfiles que cumplen esta condicin les
llamamos perfiles conjugados (figura 2)
Adems existe una condicin geomtrica que establece el tamao de los dientes. Para
que dos ruedas dentadas puedan engranar deben tener el mismo paso p o lo que es lo
mismo, el mismo mdulo m, ya que p = m
El perfil del diente de engranajes paralelos
La condicin de engrane impone que los perfiles de los dientes de las dos ruedas que
forman el engranaje deben ser conjugados.
Para cualquier perfil que tengan los dientes de una rueda, siempre habr un perfil para
los de la otra rueda que sea conjugado del primero. Este perfil puede encontrarse
fcilmente sabiendo que el movimiento del engranaje equivale al de un cilindro rodando
sobre otro sin deslizar.
Por ejemplo, supongamos dos cilindros de cartn, sobre uno de ellos se ha pegado otro
trozo de cartn con la forma del diente. Ahora se mantiene uno de los cartones quieto y el
otro con el diente se hace rodar sobre l (figura 3).
El diente va tomando distintas posiciones sobre el cartn fijo. Si con un lpiz se dibujan
sobre el cartn fijo las sucesivas posiciones del diente, se obtiene una familia de curvas.
Estas curvas se envuelven a otra curva que es el perfil del diente conjugado. En efecto,
ambos perfiles se tocan entre s en todas las posiciones, y al mismo tiempo cumplen la
condicin de que sus superficies primitivas sean dos cilindros circulares.
Pgina
PROGRAMA EDUCATIVO: LICENCIATURA EN INGENIERA MECANICA
MANUAL DE PRCTICAS DE LA ASIGNATURA: DISEO DE MECANISMOS
Figura 3. Generacin del perfil del diente conjugado.
En todas las posiciones la normal a los dos perfiles en el punto de contacto ( P) pasar
por el centro instantneo relativo ( I).
Este mtodo para encontrar dos perfiles conjugados se llama mtodo de generacin y,
segn se ver, constituye la base de la talla de perfiles por generacin. En las talladoras
de engranajes, el diente de cartn de la figura 3 se convierte en una herramienta de
bordes constantes que, adems del anterior movimiento de rodadura, tiene un
movimiento de vaivn perpendicular al plano del papel. En cada vaivn la herramienta
corta un trozo del hueco entre dientes de la rueda que est tallando.
El mismo mtodo de generacin permite ver que la nica limitacin que existe para
encontrar un perfil conjugado de otro, es que exista la anterior evolvente. Si el perfil es
convexo en todos sus puntos siempre admite una evolvente. Si es cncavo en algn
punto, el radio de curvatura de esta concavidad debe ser mayor que ( IP). Para ser
utilizables como dientes de una engranaje estos dos perfiles deben cumplir, adems, la
condicin de ser totalmente exteriores, uno al otro, en cualquier posicin.
Lnea de engrane y zona de engrane
Dado un engranaje, si consideramos un diente de una de las ruedas en contacto con otro
diente de la otra, llamaremos lnea de engrane al lugar geomtrico de las sucesivas
posiciones del punto de contacto de ambos dientes, que como ya se ha dicho, deben ser
perfiles conjugados.
Definimos como zona de engrane la porcin de espacio comprendida entre los crculos
de cabeza de las dos ruedas. Es la zona en la que entran en contacto las dos partes
dentadas de las ruedas.
.
Pgina
PROGRAMA EDUCATIVO: LICENCIATURA EN INGENIERA MECANICA
MANUAL DE PRCTICAS DE LA ASIGNATURA: DISEO DE MECANISMOS
El engrane de dos dientes empieza cuando la cabeza del diente conducido alcanza la
lnea de engrane, y termina cuando alcanza la cabeza del diente conductor (punto W y
WT) (figura 4).
Figura 4. Lnea de engrane y zona de engrane.
Si no existe rozamiento el empuje de un diente sobre otro es perpendicular a ambos en el
punto de contacto P, de modo que tiene la direccin de la recta PI, llamada por esto lnea
de presin. Esta recta forma con la tangente comn a las circunferencias primitivas de las
ruedas, un ngulo , llamado ngulo de presin (figura 5). Es decir, el empuje de una
rueda sobre otra pasa siempre por el centro relativo I, con un ngulo de presin .
Pgina
PROGRAMA EDUCATIVO: LICENCIATURA EN INGENIERA MECANICA
MANUAL DE PRCTICAS DE LA ASIGNATURA: DISEO DE MECANISMOS
Figura 5. Lnea de engrane y ngulo de presin.
En general el ngulo de presin es variable a lo largo del engrane de un mismo diente.
En ruedas dentadas rpidas, esto constituye un inconveniente grave, pues el hecho que
el empuje de una rueda sobre otra cambie continuamente de direccin, produce
vibraciones y sacudidas en los apoyos. Las nicas dentaduras en las que el ngulo de
presin es constante son las de perfil evolvente.
Deslizamiento de los dientes
Los dientes en contacto ruedan y deslizan uno sobre el otro durante el movimiento. Para
que no existiera deslizamiento, y que el movimiento relativo fuera de rodadura pura, sera
necesario que el punto de contacto ( P) coincidiera en todo momento con el centro
instantneo relativo (I). Dado que el punto de contacto va recorriendo la lnea de
engrane, siempre existe una posicin en que coincide con el centro instantneo. En esta
posicin no existe deslizamiento. Pero en cualquier otra posicin si existe.
Cuanto ms lejos de ( I) se realice el contacto, mayor ser el deslizamiento. Este
deslizamiento produce desgaste en los dientes, prdidas de potencia y calentamiento.
Conviene por lo tanto reducirlo al mnimo, para lo cual hay que mantener la distancia ( IP)
dentro de unos lmites lo ms pequeos posibles. De todos modos es imposible
suprimirlo totalmente. Para ello sera necesario que el contacto entre las dos ruedas se
realizara permanentemente en el centro instantneo relativo ( I), lo cual slo ocurre en
.
Pgina
PROGRAMA EDUCATIVO: LICENCIATURA EN INGENIERA MECANICA
MANUAL DE PRCTICAS DE LA ASIGNATURA: DISEO DE MECANISMOS
dos ruedas de friccin. En las ruedas dentadas es imposible mantener constante la
relacin de transmisin, y suprimir el deslizamiento al mismo tiempo.
El perfil de evolvente
Aunque se ha dicho que el perfil del diente podra ser cualquiera, mientras existiera su
conjugado, vamos a describir el perfil de evolvente que, por sus grandes ventajas, es la
forma de los dientes de la mayor parte de los engranajes normalizados.
Una evolvente de crculo es la curva que dibuja el extremo de un hilo al desenrollarse de
un carrete (figura 6).
Figura 6. Formacin de la evolvente.
Para comprender el funcionamiento de los engranajes de perfil de evolvente, imaginemos
un hilo que se desenrolla de un carrete y se enrolla en el otro. Estos carretes no
permanecen fijos sino que giran sobre s mismos a medida que avanza el hilo.
Imaginemos tambin pegado a cada carrete, en la direccin del plano de la figura, un
cartn ms grande que el carrete y que gira con l (figura 7). Un punto determinado ( P)
del hilo, al pasar de un carrete al otro, dibuja sobre estos cartones dos evolventes de
crculo que giran por lo tanto con sus correspondientes carretes. Como estas dos curvas
son siempre normales al hilo, resultan tangentes entre s todas las posiciones. Si ahora
recortamos los dientes que tengan este perfil, en los cartones, se comprende que
haciendo engranar estos dos dientes se reproduce el mismo movimiento que al estirar el
hilo.
Pgina
PROGRAMA EDUCATIVO: LICENCIATURA EN INGENIERA MECANICA
MANUAL DE PRCTICAS DE LA ASIGNATURA: DISEO DE MECANISMOS
Figura 7. Formacin de las dos evolventes.
Una pareja de dientes conjugados tiene las siguientes propiedades:
a. La lnea de engrane ser la lnea recta entre los puntos T1 y T2, o sea el anterior
hilo imaginario. En efecto, segn vimos, el punto de contacto (P) se encuentra
siempre sobre dicho hilo.
b. La lnea de empuje coincide en todas las posiciones con la lnea de engrane.
c. El ngulo de presin es constante a lo largo del engrane.
d. Si el ngulo de presin es constante se eliminan vibraciones y ruidos.
e. Cualquier dentadura de evolvente puede engranar con cualquier otra y con
cualquier distancia entre centros, si tienen el mismo paso, pues los perfiles de
evolvente siempre sern conjugados. Esto permite una gran versatilidad en los
acoplamientos de ruedas y en los procedimientos de tallado.
Gracias a estas ventajas puede decirse que las ruedas dentadas con dientes de perfil de
evolvente son la solucin ms perfecta que existe para los engranajes de transmisin de
potencia. Sin embargo, en algunas aplicaciones, tales como las bombas de engranajes y
los mecanismos de relojera, donde no se busca la transmisin de potencia se emplean
otros tipos de perfiles conjugados (por ejemplo, cicloidales), que permiten satisfacer
condiciones particulares.
NOMENCLATURA
Nmero de dientes de la rueda, Z .
Paso, p: Distancia entre puntos homlogos de dos perfiles consecutivos de una misma
rueda, medida sobre la circunferencia primitiva de referencia. Para que dos ruedas
engranen deben tener el mismo paso.
Mdulo, m: Cociente entre el dimetro primitivo de referencia y el nmero de dientes.
.
Pgina
PROGRAMA EDUCATIVO: LICENCIATURA EN INGENIERA MECANICA
MANUAL DE PRCTICAS DE LA ASIGNATURA: DISEO DE MECANISMOS
Dos ruedas engranan si tienen el mismo mdulo.
Paso diametral (diametral pitch), dp: Cociente entre el nmero de dientes y el dimetro
primitivo de referencia expresado en pulgadas.
Figura 8. Representacin de los principales parmetros de un engranaje.
Circunferencia de cabeza, ra: Circunferencia que limita los dientes por su parte superior.
Circunferencia de pie, rf: Circunferencia que limita el hueco entre dientes por su parte
inferior. El hueco debe ser suficientemente profundo para dejar pasar la cabeza de los
dientes de la otra rueda.
Altura de cabeza o adendo, ha: Distancia radial entre la circunferencia primitiva y la
cabeza del diente.
Altura de pie o dedendo, hf: Distancia radial entre la raz del diente y la circunferencia
primitiva.
Altura total, h: Suma de la altura de cabeza y la de pie.
Holgura o juego circunferencial: Espacio que queda al acoplar una pareja de dientes.
Es necesaria para permitir la deflexin de los dientes, el paso del lubricante y la
expansin trmica.
.
Pgina
PROGRAMA EDUCATIVO: LICENCIATURA EN INGENIERA MECANICA
MANUAL DE PRCTICAS DE LA ASIGNATURA: DISEO DE MECANISMOS
Huelgo o juego en cabeza, c: Espacio que dejan una pareja de dientes al engranar,
entre la cabeza del diente y el fondo del espacio interdental de la rueda conectada. Suele
valer: 0,25 m.
Altura de trabajo, hw: Diferencia entre la altura total del diente y el juego.
Espesor, s: Espesor del diente, medido sobre la circunferencia primitiva.
Hueco, e: Hueco entre dientes, medido sobre la circunferencia primitiva.
Cara: Parte de la superficie del diente que queda entre la circunferencia primitiva y la de
cabeza.
Flanco: Parte de la superficie de un diente que queda entre la circunferencia primitiva y
la de pie.
Anchura de flanco, b: Anchura del diente medida en direccin paralela a la del eje.
20
25
Figura 9. Perfil de referencia del dentado y de la herramienta.
14.5
Pgina
PROGRAMA EDUCATIVO: LICENCIATURA EN INGENIERA MECANICA
MANUAL DE PRCTICAS DE LA ASIGNATURA: DISEO DE MECANISMOS
PERFIL DE REFERENCIA.
Cremallera de referencia: til de corte ficticio que se empleara para generar los dientes
de un engranaje con dimensiones normalizadas.
Perfil de referencia: Seccin normal de la cremallera de referencia. Se emplea para
definir las dimensiones normalizadas del dentado.
Las dimensiones del perfil de referencia y de las herramientas asociada a l estn
normalizadas (tabla 1 y figura 10).
rb r cos 0
rb r cos
Figura 10. Representacin de una cremallera normalizada para la generacin de dientes de engranajes.
Tabla 1. Parmetros normalizados de un engranaje.
PARMETROS
Perfil de Referencia
Normalizado
ngulo de presin de referencia
Altura de cabeza del dentado
Altura de pie del dentado
Altura de trabajo
Juego de cabeza
0 20
ha m
h f ha 0 1.25m
hW 2m
c 0.25m
Pgina
PROGRAMA EDUCATIVO: LICENCIATURA EN INGENIERA MECANICA
MANUAL DE PRCTICAS DE LA ASIGNATURA: DISEO DE MECANISMOS
Altura total del dentado
Espesor
Hueco
h 2.25m
s m
e m
3. Objetivo General.
El objetivo de esta prctica ser determinar el movimiento prctico adecuado de un tren de engranes
empleando la teora de la cinemtica de los trenes de engranes.
4. Objetivos Especficos.
1.- Comprender y analizar el movimiento de los trenes de engrane
2.- Analizar el tipo de fuente motriz que necesita un tren de engranes segn su intencin
de salida.
5. Reactivos/insumos, materiales/utensilios y equipos.
.
Pgina
PROGRAMA EDUCATIVO: LICENCIATURA EN INGENIERA MECANICA
MANUAL DE PRCTICAS DE LA ASIGNATURA: DISEO DE MECANISMOS
A)
CANTIDAD
REACTIVOS/INSUMOS.
DESCRIPCIN
ESPECIFICACIONES
No Aplica
No Aplica
B) MATERIALES/UTENSILIOS.
No aplica
CANTIDAD
OBS.
No Aplica
DESCRIPCIN
Engranes rectos
ESPECIFICACIONES
Que sean de diferente
dimetro y diferente
cantidad de dientes
OBS.
El alumno
debe traer
los engranes
Pin y cremallera
Que concuerden en el
desplazamiento del dentado
Pao o franela
Para limpieza
El alumno
debe traer el
pin y la
cremallera
El alumno
debe traer el
pao o
franela
C)
CANTIDAD
EQUIPOS/INSTRUMENTOS.
DESCRIPCIN
Calibrador vernier digital
Tacmetro
ESPECIFICACIONES
Que contenga medidas del
sistema internacional y
sistema ingls. Marca
Mitutoyo
Que contenga medidas del
sistema internacional y
sistema ingls. Marca
Mitutoyo
OBS.
El equipo lo
proporciona
la institucin
El
alumno
debe traer el
tacmetro.
6. Desarrollo de la Actividad Prctica.
.
Pgina
PROGRAMA EDUCATIVO: LICENCIATURA EN INGENIERA MECANICA
MANUAL DE PRCTICAS DE LA ASIGNATURA: DISEO DE MECANISMOS
1. Dibujar los trenes de engranes.
Datos:
Re, radio del sector.
m, mdulo
Z, nmero de dientes
R= m Z/2
W2
2
3
6
7
8
Pgina
PROGRAMA EDUCATIVO: LICENCIATURA EN INGENIERA MECANICA
MANUAL DE PRCTICAS DE LA ASIGNATURA: DISEO DE MECANISMOS
2.- Calcular:
La velocidad angular de salida de cada tipo de tren de engranes:
La expresin para calcular la velocidad del engrane de salida.
El sentido del giro del engrane de salida.
7. Cuestionario.
1.- Un engrane recto de involuta de profundidad total a 20, con 18 dientes, que tiene un
paso diametral de 12 in.
a) El dimetro del crculo de paso.
b) El dimetro del crculo de la base.
c) El modulo.
d) El paso de la base.
e) El paso circular
2.- Un engrane recto de involuta de profundidad total a 20, con 48 dientes, que tiene un
paso diametral de 8 in.
a) El dimetro del crculo de paso.
b) El dimetro del crculo de la base.
c) El modulo.
d) El paso de la base.
e) El paso circular
3.- Un engrane recto de involuta de profundidad total a 14 , con 40 dientes, que tiene
.
Pgina
PROGRAMA EDUCATIVO: LICENCIATURA EN INGENIERA MECANICA
MANUAL DE PRCTICAS DE LA ASIGNATURA: DISEO DE MECANISMOS
un paso diametral de 16 in.
a) El dimetro del crculo de paso.
b) El dimetro del crculo de la base.
c) El modulo.
d) El paso de la base.
e) El paso circular
4.- Un engrane recto a 25, con 21 dientes, que tiene un mdulo mtrico de 4 mm.
a) El dimetro del crculo de paso.
b) El dimetro del crculo de la base.
c) El paso circular
d) El paso de la base.
5.- Dos engranes rectos de involuta de profundidad total a 20, con paso de 12, que se
utiliza en una sierra circular industrial para cortar madera. El pin tiene 18 dientes y el
engrane, 42
c) La distancia entre centros
d) La razn de contacto
6.- Dos engranes rectos de involuta de profundidad total a 20, con paso igual a 4, se
utilizan en una volteadora para eliminar la rebabas de acero de partes troqueladas. El
pin tiene 12 dientes y el engrane, 28
d) La distancia entre centros
e) La razn de contacto
7- Dos engranes rectos de involuta de profundidad total a 20, con paso de 12, que se
utiliza en una sierra circular industrial para cortar madera. El pin tiene 18 dientes y el
engrane, 42
b) Determine si hay interferencia
8.- Dos engranes rectos de involuta de profundidad total a 20, con paso igual a 4, se
utilizan en una volteadora para eliminar la rebabas de acero de partes troqueladas. El
pin tiene 12 dientes y el engrane, 28
f) Determine si hay interferencia
9.- Selecciona un par de engranes de acero dulce, a 20, para una aplicacin donde se
necesita transmitir 1 hp. El pin impulsa a 1725 rpm y el engrane debe girar tan cerca
como sea posible de 560 rpm. Determine el conjunto adecuado de engranes. Paso
diametral de 16.
10.- Selecciona un par de engranes de acero dulce, a 20, para una aplicacin donde se
necesita transmitir 10 hp. El pin impulsa a 1175 rpm y el engrane debe girar tan cerca
.
Pgina
PROGRAMA EDUCATIVO: LICENCIATURA EN INGENIERA MECANICA
MANUAL DE PRCTICAS DE LA ASIGNATURA: DISEO DE MECANISMOS
como sea posible de 230 rpm. Determine el conjunto adecuado de engranes. Paso
diametral de 6.
8. Bibliografa
1. Mabie, H. H. and Reinholtz. C. F. (2005). Mecanismo y Dinmica de Maquinaria. D.F.,
Mxico: Limusa
2. Myszka, D. H. (2012). Mquinas y Mecanismos. Edo de Mxico, Mxico: Pearson
3.
4.
5.
6.
7.
8.
9.
Education.
Calero, P. R., Carta, J. A. (1999). Fundamentos de Mecanismos y Mquinas para
Ingenieros. Madrid, Espaa: McGraw-Hill.
Derrick, W. R. (1987). Variable Compleja con Aplicaciones. D. F., Mxico: Grupo Editorial
Iberoamrica.
Doughtie, V. L., James, W. H. (1986). Elementos de Mecanismos. D. F., Mxico: CECSA.
Erdman, A. G. y Sandor, G. N. (1998). Diseo de Mecanismos, Anlisis y Sntesis. D. F.,
Mxico: Prentice Hall.
Norton, R. L. (2000). Diseo de Maquinaria. Estado de Mxico: Mxico: Prentice Hall.
Juvinall, R. C., and Marshek, K. M. (1991). Fundamentals of Machine Component Design.
New York, US: John Wiley & Sons.
Norton, R. L. (1999). Design of Machinery: An Introduction tho the Synthesis and Analysis
of Mechanisms and Mechines. New York, US: McGraw-Hill.
9. Formato y especificacin del reporte de prctica.
a)
b)
c)
d)
e)
f)
g)
Introduccin
Objetivo
Desarrollo de la actividad prctica
Resultados
Discusin
Cuestionario
Bibliografa
Pgina
Vous aimerez peut-être aussi
- Manual Laboratorio Suelo 2 Vers00 PDFDocument61 pagesManual Laboratorio Suelo 2 Vers00 PDFIvelsa100% (2)
- Practica 2 Control de Lazo CerradoDocument12 pagesPractica 2 Control de Lazo Cerradojose jose50% (2)
- INFORME Bomba USACHDocument23 pagesINFORME Bomba USACHSimón ArayaPas encore d'évaluation
- A - 20151021 - 08 - Determinacion Del Error de Medicion Experimental - Chunga - CarlosDocument15 pagesA - 20151021 - 08 - Determinacion Del Error de Medicion Experimental - Chunga - CarlosCarlos AndresPas encore d'évaluation
- CAN VAN Bus Los ProtocolosDocument41 pagesCAN VAN Bus Los ProtocolosAdolfo Geerdts50% (2)
- 100 Ejercicios de Visual BasicDocument18 pages100 Ejercicios de Visual BasicPedro Rivero100% (1)
- MTLB CursoDocument57 pagesMTLB CursoDavid Cruz MartínezPas encore d'évaluation
- 2019 - I-PRÁCTICA 1A-Dinámica - SolucionarioDocument4 pages2019 - I-PRÁCTICA 1A-Dinámica - SolucionarioAlicia Llancare QuispePas encore d'évaluation
- Diseño de Eje y Selección de Rodamientos.Document87 pagesDiseño de Eje y Selección de Rodamientos.carlosPas encore d'évaluation
- S5 - Parametros Indicados y Efectivos - Pérdidas MecánicasDocument16 pagesS5 - Parametros Indicados y Efectivos - Pérdidas MecánicasLuis Huaman YachasPas encore d'évaluation
- Estructura de FuncionesDocument8 pagesEstructura de FuncionesJose Alonso AguilarPas encore d'évaluation
- Curvas CaracteristicasDocument22 pagesCurvas CaracteristicasJordy Bernabe SalasPas encore d'évaluation
- Separata MCI TeoriaDocument37 pagesSeparata MCI TeoriaRicardo Sebastian Ricardo RanillaPas encore d'évaluation
- Estructura de Funciones Rev1Document7 pagesEstructura de Funciones Rev188jdccPas encore d'évaluation
- M É Todo Del Impulso y Cantidad de MovimientoDocument8 pagesM É Todo Del Impulso y Cantidad de MovimientoEntretuymilmares Aragon100% (1)
- MN116 Syllabus Termodinamica PDFDocument6 pagesMN116 Syllabus Termodinamica PDFGustavo Rebaza0% (1)
- Silabo Del CursoDocument8 pagesSilabo Del CursoyvanPas encore d'évaluation
- Dinamica Maquinas PDFDocument5 pagesDinamica Maquinas PDFChristian Arceliano IllanesPas encore d'évaluation
- Maquinas Electricas Alvarez PucpDocument71 pagesMaquinas Electricas Alvarez PucpmauricioPas encore d'évaluation
- Problemas para Examen Final 2016iiDocument4 pagesProblemas para Examen Final 2016iiEduardo Velásquez PortugalPas encore d'évaluation
- INFORME FINAL DE SDF br123Document16 pagesINFORME FINAL DE SDF br123Cristian BrunoPas encore d'évaluation
- Proceso de Transferencia de EnergiaDocument118 pagesProceso de Transferencia de EnergiaBRUCE DARWIN PACHAS TALLAPas encore d'évaluation
- Turbomáquinas 2Document301 pagesTurbomáquinas 2Jesús Cabrera CamachoPas encore d'évaluation
- Centrales NuclearesDocument22 pagesCentrales NuclearesSergio Diaz PardoPas encore d'évaluation
- Proyecto DiseñoDocument9 pagesProyecto DiseñoSebastián MacíasPas encore d'évaluation
- Ficha de Exploración de AALR Un Enfoque de Sistemas Hacia Mantenimiento Centrado en Confiabilidad (RCM) de Las Turbinas de VientoDocument3 pagesFicha de Exploración de AALR Un Enfoque de Sistemas Hacia Mantenimiento Centrado en Confiabilidad (RCM) de Las Turbinas de VientoJesus CHPas encore d'évaluation
- Ing. Econ 5to Avance Universidad Nacional de Ingenieria Facultad de Ingenieria Mecanica UNI FIM ms213 Proyecto Primera Semana Ing Economica y FinanzasDocument12 pagesIng. Econ 5to Avance Universidad Nacional de Ingenieria Facultad de Ingenieria Mecanica UNI FIM ms213 Proyecto Primera Semana Ing Economica y FinanzasJuan Jose MFPas encore d'évaluation
- UNS Sílabo Tesis de Ingeniería Mecánica I (2021-2)Document6 pagesUNS Sílabo Tesis de Ingeniería Mecánica I (2021-2)Ana Estela Carbonel NeciosupPas encore d'évaluation
- C224 Curvas Característica de Una Turbina Pelton PDFDocument6 pagesC224 Curvas Característica de Una Turbina Pelton PDFDiego CerónPas encore d'évaluation
- CavitaciónDocument32 pagesCavitaciónJonathan Andrés PullasPas encore d'évaluation
- Iau Proyecto de Grado 2019Document118 pagesIau Proyecto de Grado 2019Hernan SemperteguiPas encore d'évaluation
- Informe Bombas TurboDocument19 pagesInforme Bombas TurboAlberto Yanac BenaventePas encore d'évaluation
- Resolucion Shigley 1Document1 pageResolucion Shigley 1Deyner AzañedoPas encore d'évaluation
- Plan Turbomaq PucpDocument7 pagesPlan Turbomaq Pucpelizabeth carvajalPas encore d'évaluation
- Conociendo Una TurbinaDocument14 pagesConociendo Una TurbinaAlfredoIgnacioPerezPas encore d'évaluation
- Primer Examen de TurbomaquinasDocument5 pagesPrimer Examen de TurbomaquinasGerardo Diestra García100% (1)
- C915 Turbina PeltonDocument7 pagesC915 Turbina PeltonAbraham Vizalla AucaPas encore d'évaluation
- Silabo ML839-20-1Document3 pagesSilabo ML839-20-1Alfredo BellidoPas encore d'évaluation
- Plantilla Proyecto Completo ChalcoDocument39 pagesPlantilla Proyecto Completo ChalcoLeticia HilarioPas encore d'évaluation
- Seleccion de Turbina-Terminado PDFDocument108 pagesSeleccion de Turbina-Terminado PDFMaycool Jhon Haro LopezPas encore d'évaluation
- Evaluación Sumativa 3 Elementos de Máquinas Otoño 2021Document7 pagesEvaluación Sumativa 3 Elementos de Máquinas Otoño 2021Matias CarcamoPas encore d'évaluation
- SESION 03 04 05 06HIPOTESIS METODOLOGIA VARIABLES TIPOINVESTIGACIONcooregidoDocument62 pagesSESION 03 04 05 06HIPOTESIS METODOLOGIA VARIABLES TIPOINVESTIGACIONcooregidoBilly Urbano MunguiaPas encore d'évaluation
- MC 338 Dina MicaDocument6 pagesMC 338 Dina MicaHiuston Reymundo FloresPas encore d'évaluation
- GM 04 - Mantenimiento Predictivo - Im 04Document49 pagesGM 04 - Mantenimiento Predictivo - Im 04Frank AmayaPas encore d'évaluation
- Delacruz LJ PDFDocument234 pagesDelacruz LJ PDFLEONEL JORDY PEREZ SOLORZANOPas encore d'évaluation
- Trabajo FisicaDocument42 pagesTrabajo FisicaJulio Roberto Mezajil TumePas encore d'évaluation
- Secadr Solar Tipo Cabina Con SIMUSOL PDFDocument209 pagesSecadr Solar Tipo Cabina Con SIMUSOL PDFWaldir ValeroPas encore d'évaluation
- MC516Document6 pagesMC516Christian Fonseca RodriguezPas encore d'évaluation
- Turbina de Vapor Múltiples-TerminadoDocument12 pagesTurbina de Vapor Múltiples-TerminadoGonzalo LPas encore d'évaluation
- Practica 6 Auxiliatura Mec 3300Document2 pagesPractica 6 Auxiliatura Mec 3300Wilson Albert Ramos GuerrerosPas encore d'évaluation
- Modelado Francis Rapida GrupoDocument77 pagesModelado Francis Rapida Grupoclinton jhonPas encore d'évaluation
- Engranaje Helicoidal 2017 - 3Document5 pagesEngranaje Helicoidal 2017 - 3WilliamMogollonTavara0% (1)
- 2019-II MN216 Informe 5 Mecánica de Fluidos I FIM - UNIDocument40 pages2019-II MN216 Informe 5 Mecánica de Fluidos I FIM - UNIALEXANDER EMANUEL ISIDRO OLLEROPas encore d'évaluation
- 03 Diseño y Construcción de Un Modelo de Turbina Francis A Partir de Un Prototipo de 200 KW de Potencia Usando La Teoría de Semejanza HidráulicaDocument470 pages03 Diseño y Construcción de Un Modelo de Turbina Francis A Partir de Un Prototipo de 200 KW de Potencia Usando La Teoría de Semejanza HidráulicaZumi Huaman HuamanPas encore d'évaluation
- Labo de Perdidas 4 y 5Document27 pagesLabo de Perdidas 4 y 5Cesar CarhuavilcaPas encore d'évaluation
- INFORME 4 MN136 Grupo 3Document13 pagesINFORME 4 MN136 Grupo 3Terry PérezPas encore d'évaluation
- Biela Manivela Ale TerminadoDocument9 pagesBiela Manivela Ale Terminado120ryPas encore d'évaluation
- Informe 5 de Laboratorio MotoresDocument28 pagesInforme 5 de Laboratorio MotoresAlbert CalderonPas encore d'évaluation
- III-Informe de Calculo de Elementos de Maquinas IIDocument18 pagesIII-Informe de Calculo de Elementos de Maquinas IIAnonymous 0y4P6G8LYPas encore d'évaluation
- Apuntes MicrologixDocument161 pagesApuntes MicrologixRaul Guevara TorresPas encore d'évaluation
- Guiatecnologiaeingenieria 2324 V 6Document22 pagesGuiatecnologiaeingenieria 2324 V 6Jogal GamePas encore d'évaluation
- LavadoraDocument36 pagesLavadoraMiguel Angel BritoPas encore d'évaluation
- Laboratorio Maquinas Herramientas IIDocument41 pagesLaboratorio Maquinas Herramientas IIMarlon GeronimoPas encore d'évaluation
- Manual Tmi 2024-1Document95 pagesManual Tmi 2024-1Diego Cuevas EstradaPas encore d'évaluation
- Guia LraDocument3 pagesGuia LraSteven VergelPas encore d'évaluation
- PDFDocument2 pagesPDFVictor ZbPas encore d'évaluation
- Apuntes CompletosDocument199 pagesApuntes Completosedwart980Pas encore d'évaluation
- Document 1Document6 pagesDocument 1Deyvi Osmar Zegarra VillenaPas encore d'évaluation
- 1-FORMULARIO UNICO DE LA OFERTA-signed-signedDocument25 pages1-FORMULARIO UNICO DE LA OFERTA-signed-signedAlexander LoachaminPas encore d'évaluation
- C13 C15 ElectrogeneradoresDocument277 pagesC13 C15 Electrogeneradoresalan gonzalez100% (3)
- Sesión de Aprendizaje #1 (7 de Marzo)Document2 pagesSesión de Aprendizaje #1 (7 de Marzo)jese jeff gutierrez cardenasPas encore d'évaluation
- Carta Ofreciendo ServiciosDocument4 pagesCarta Ofreciendo ServiciosOscar Enrique Guarín RincónPas encore d'évaluation
- Carnetizacion UniversitariaDocument9 pagesCarnetizacion UniversitariaRina.R Mora VargasPas encore d'évaluation
- Centro de Transformacion de Intemperie Sobre ApoyoDocument12 pagesCentro de Transformacion de Intemperie Sobre ApoyoElisa Rojas GirettPas encore d'évaluation
- Pcefact - Desarrollo Web, Sistemas Online y Marketing Digital PDFDocument2 pagesPcefact - Desarrollo Web, Sistemas Online y Marketing Digital PDFPeople CONSULTING EIRLPas encore d'évaluation
- Material TicDocument4 pagesMaterial TicAlbert ZaratePas encore d'évaluation
- Insight Intermediate Teacher's Book PDF 2 PDFDocument11 pagesInsight Intermediate Teacher's Book PDF 2 PDFMarta MikaiPas encore d'évaluation
- Programación en Python - Parte II - EjemplosDocument18 pagesProgramación en Python - Parte II - EjemplosJoshua MerrittPas encore d'évaluation
- Líneas de Espera?Document3 pagesLíneas de Espera?Erika Garcia100% (1)
- Resolucion de Sistemas LinealesDocument3 pagesResolucion de Sistemas LinealesCarhua Castro PercoisitoPas encore d'évaluation
- Manual de UsuarioDocument2 pagesManual de Usuariokta54Pas encore d'évaluation
- La Educación y La Economia Del ConocimientoDocument21 pagesLa Educación y La Economia Del ConocimientoAngie Aranda Patiño100% (1)
- BROCHURE Tablets LenovoDocument2 pagesBROCHURE Tablets Lenovogcaira101211Pas encore d'évaluation
- Diferencias Entre Auditoría Financiera Típica y Auditoría ForenseDocument50 pagesDiferencias Entre Auditoría Financiera Típica y Auditoría Forensediego sanchez riosPas encore d'évaluation
- 26 Fallas Resueltas en El Chassis Cn-001a Televisor DaewooDocument24 pages26 Fallas Resueltas en El Chassis Cn-001a Televisor DaewooAntonio José Montaña Pérez de Cristo75% (4)
- Apuntes Lab2 AntenasDocument3 pagesApuntes Lab2 AntenasCarlosPas encore d'évaluation
- La Regla Del Oso IdiotaDocument5 pagesLa Regla Del Oso IdiotaJessicaa Treejoo100% (1)
- Escala SDocument10 pagesEscala SFernando Idrogo BustamantePas encore d'évaluation
- Conociendo Mis Emociones 2Document25 pagesConociendo Mis Emociones 2sebastian Choque menesesPas encore d'évaluation
- Programación 1º DAMDocument47 pagesProgramación 1º DAMAndyPas encore d'évaluation