Vous aimerez peut-être aussi
- Installation and Operation Instructions For Custom Mark III CP Series Oil Fired UnitD'EverandInstallation and Operation Instructions For Custom Mark III CP Series Oil Fired UnitPas encore d'évaluation
- Documentation For: Technische Information Technical InformationDocument32 pagesDocumentation For: Technische Information Technical InformationLabinotMMorinaPas encore d'évaluation
- UVN SeriesDocument3 pagesUVN SeriesgreatharunPas encore d'évaluation
- MR J2 B Installation ManualDocument197 pagesMR J2 B Installation ManualtranhoachbnPas encore d'évaluation
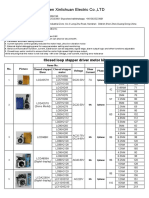
- Shenzhen Xinlichuan Electric Co.,LTD: Closed Loop Stepper Driver Motor KitDocument1 pageShenzhen Xinlichuan Electric Co.,LTD: Closed Loop Stepper Driver Motor KitIonescuTeodora100% (1)
- XMT 308 ManualDocument4 pagesXMT 308 Manualzivko13Pas encore d'évaluation
- RE50214 Nivometer PDFDocument16 pagesRE50214 Nivometer PDFCaspar Heerkens100% (1)
- HX-HR Series Preformed Armor Rods For RepairDocument3 pagesHX-HR Series Preformed Armor Rods For RepairhcindustryPas encore d'évaluation
- Utc 421PDocument4 pagesUtc 421PDeep PrajapatiPas encore d'évaluation
- SD Series Digital Ac Servo System User Manual: (Third Page)Document39 pagesSD Series Digital Ac Servo System User Manual: (Third Page)marcos antonio santos100% (1)
- Manual de Diodos PDFDocument229 pagesManual de Diodos PDFruben riveraPas encore d'évaluation
- 915Document9 pages915Jorge CotzomiPas encore d'évaluation
- Semikron Datasheet SKKQ 1200 14e 08890060Document4 pagesSemikron Datasheet SKKQ 1200 14e 08890060carlos enrique cuzco garciaPas encore d'évaluation
- ALPHA6000 Series General Purpose AC DriveDocument12 pagesALPHA6000 Series General Purpose AC DriveRoberto Manzanares MtzPas encore d'évaluation
- Fe Series Operation Manual - VicomDocument47 pagesFe Series Operation Manual - VicomMADS LABPas encore d'évaluation
- Delta DPA CatalogDocument7 pagesDelta DPA CatalogElectromatePas encore d'évaluation
- SR4 ControladorDocument2 pagesSR4 ControladorErick Gabriel Chiroque SilopúPas encore d'évaluation
- Panx-350 SPCDocument64 pagesPanx-350 SPCbhaskar reddyPas encore d'évaluation
- VFnC1 Manual 94Document99 pagesVFnC1 Manual 94gfplmsPas encore d'évaluation
- 703304-001 Product Specifications Set Contact Blocks and Contact FingersDocument2 pages703304-001 Product Specifications Set Contact Blocks and Contact FingersDodi C hardyPas encore d'évaluation
- Wiring Milling SZGHDocument13 pagesWiring Milling SZGHCipta Otomasi Indonesia COIPas encore d'évaluation
- Product Catalogue 2Document20 pagesProduct Catalogue 2Varinder LoonaPas encore d'évaluation
- PI500 Quickstart Guide Drive Operation 2017 (2) - 230512 - 174430Document32 pagesPI500 Quickstart Guide Drive Operation 2017 (2) - 230512 - 174430Nenad DjurasovicPas encore d'évaluation
- EC Wiring Diagrams: M3G074 Motor (Single Phase) M3G084 Motor (Single Phase)Document1 pageEC Wiring Diagrams: M3G074 Motor (Single Phase) M3G084 Motor (Single Phase)EduRoiPas encore d'évaluation
- T Series EmersonDocument4 pagesT Series EmersonJose SurielPas encore d'évaluation
- JHD629 204aDocument22 pagesJHD629 204apiyushpandeyPas encore d'évaluation
- Power Factor Controllers: ERN 11005 / ERN 11007 Advanced Key Features: ERN 11206 / ERN 11214 Smart Key FeaturesDocument3 pagesPower Factor Controllers: ERN 11005 / ERN 11007 Advanced Key Features: ERN 11206 / ERN 11214 Smart Key FeaturesSaeed AhmedPas encore d'évaluation
- CNCmakers-EP100 B QuickGuide-EN - EP100Document14 pagesCNCmakers-EP100 B QuickGuide-EN - EP100Angelica PeñarandaPas encore d'évaluation
- BLDC 5015aDocument5 pagesBLDC 5015aroozbehxoxPas encore d'évaluation
- BAC - VXC-S - Technical Data SheetsDocument12 pagesBAC - VXC-S - Technical Data SheetsMahmoud AliPas encore d'évaluation
- BCH Electric Ltd-Limit Switch-CatalogueDocument6 pagesBCH Electric Ltd-Limit Switch-CataloguesachmayaPas encore d'évaluation
- User Manual (SZGH-X Series) V1.5-UDocument58 pagesUser Manual (SZGH-X Series) V1.5-UDmytroKrPas encore d'évaluation
- Encoder S Short FormDocument2 pagesEncoder S Short FormelecompinnPas encore d'évaluation
- Kulthorn Kirby Public Co.,Ltd.: Technical SpecificationDocument2 pagesKulthorn Kirby Public Co.,Ltd.: Technical SpecificationPradhish RejiPas encore d'évaluation
- Tecumseh TC Series Compressor Reference Guide May 2016Document20 pagesTecumseh TC Series Compressor Reference Guide May 2016Andre AnjosPas encore d'évaluation
- Delta ASDA B2 User ManualDocument337 pagesDelta ASDA B2 User ManualSeyhmus YklPas encore d'évaluation
- An 15525Document7 pagesAn 15525Dede Tuhadi PrayitnoPas encore d'évaluation
- THGT Series: Cylindrical Cased Axial Flow FansDocument42 pagesTHGT Series: Cylindrical Cased Axial Flow Fanszeljkogr100% (1)
- Trooper 3000 Series Process IndicatorDocument2 pagesTrooper 3000 Series Process Indicatorwramadhani65Pas encore d'évaluation
- Checklist For Servomotor SMR A51321 TroubleshootingDocument4 pagesChecklist For Servomotor SMR A51321 TroubleshootingLuwani LinoPas encore d'évaluation
- Servo Motor'S Instruction Manual For Hydraulic SystemDocument12 pagesServo Motor'S Instruction Manual For Hydraulic Systembbrean14Pas encore d'évaluation
- Alpha 6000 Series General Purpose Ac Drive PDFDocument12 pagesAlpha 6000 Series General Purpose Ac Drive PDFGaurav NandaPas encore d'évaluation
- Service Manual: Model: FR-4506K FR-4506NDocument36 pagesService Manual: Model: FR-4506K FR-4506NAlioverBetancourtPas encore d'évaluation
- FFU100HAK 115-127 V 60 HZ 1Document3 pagesFFU100HAK 115-127 V 60 HZ 11000tech refrigeracao50% (2)
- XGB-U +manual V1.0+XBC-DN32UUAUP XBC-DR28UUAUP PDFDocument1 322 pagesXGB-U +manual V1.0+XBC-DN32UUAUP XBC-DR28UUAUP PDFJaka SimonicPas encore d'évaluation
- Golink Temperature Controller Fy SeriesDocument2 pagesGolink Temperature Controller Fy SeriesJulio OchoaPas encore d'évaluation
- NJR2 Soft Starter ChinDocument5 pagesNJR2 Soft Starter ChinJessy Marcelo Gutierrez ChuraPas encore d'évaluation
- Int69 Vsy-Ii Protection ModuleDocument1 pageInt69 Vsy-Ii Protection Moduleamir12345678Pas encore d'évaluation
- Ficha Tecnica ZS21KAE-PFV InglesDocument2 pagesFicha Tecnica ZS21KAE-PFV InglesPascual DuquePas encore d'évaluation
- RX Rotary Union: For Water, Air, and Thermal Oil ServiceDocument24 pagesRX Rotary Union: For Water, Air, and Thermal Oil Servicexavicojm100% (2)
- Rotaclip PlanosDocument121 pagesRotaclip PlanosEnrique Martinez RojasPas encore d'évaluation
- Regulador AxialDocument12 pagesRegulador Axialluis_d_mPas encore d'évaluation
- Samsung Sr-30!34!37nma NMB RMBDocument30 pagesSamsung Sr-30!34!37nma NMB RMBAnonymous ajQr0qX100% (2)
- Yaskawa GPD 503 Manual PDFDocument160 pagesYaskawa GPD 503 Manual PDFArturo Sánchez100% (2)
- DS2 Series 380V Servo Drive: Fast Reference ManualDocument43 pagesDS2 Series 380V Servo Drive: Fast Reference Manualspectra-tw100% (1)
- DS2 Series 220V Servo DriverDocument59 pagesDS2 Series 220V Servo Driverspectra-tw100% (1)
- DS2 ASmanualDocument50 pagesDS2 ASmanualAquilesPas encore d'évaluation
- VFD-A Manual enDocument86 pagesVFD-A Manual enShani ImranPas encore d'évaluation
- ACS550 U1 Quick Start GuideDocument2 pagesACS550 U1 Quick Start GuideIvonne Mayela DiazPas encore d'évaluation
- FATEKIoT QuickStart enDocument35 pagesFATEKIoT QuickStart enDragan ŠašićPas encore d'évaluation
- VM vHF-OTHR 201703 ENDocument2 pagesVM vHF-OTHR 201703 ENDragan ŠašićPas encore d'évaluation
- TK3701D User Manual ENDocument31 pagesTK3701D User Manual ENDragan ŠašićPas encore d'évaluation
- Read MeDocument1 pageRead MeDragan ŠašićPas encore d'évaluation
- Release Notes OPC Server 5.13.01Document8 pagesRelease Notes OPC Server 5.13.01Dragan ŠašićPas encore d'évaluation
- FATEKIoT IAccess Insight Manual enDocument15 pagesFATEKIoT IAccess Insight Manual enDragan ŠašićPas encore d'évaluation
- Chint Relay JSS48A-S Vremenski RelejDocument2 pagesChint Relay JSS48A-S Vremenski RelejDragan ŠašićPas encore d'évaluation
- Whirlpool Amb 545 WH SK PDFDocument9 pagesWhirlpool Amb 545 WH SK PDFDragan ŠašićPas encore d'évaluation
- KL 3356 enDocument55 pagesKL 3356 enDragan ŠašićPas encore d'évaluation
- Information For Submission of Papers To Journals: Set in Italics Instead of BoldfaceDocument2 pagesInformation For Submission of Papers To Journals: Set in Italics Instead of BoldfaceDragan ŠašićPas encore d'évaluation
- MGate MB3180 QIG v1 PDFDocument2 pagesMGate MB3180 QIG v1 PDFDragan ŠašićPas encore d'évaluation
- Contribution of Information Technology in Improving of The Educational ProcessDocument7 pagesContribution of Information Technology in Improving of The Educational ProcessDragan ŠašićPas encore d'évaluation
- BK 3 XX 0 enDocument90 pagesBK 3 XX 0 enDragan ŠašićPas encore d'évaluation
- DRV 8811Document24 pagesDRV 8811Dragan ŠašićPas encore d'évaluation
- Pult Ceo 1Document1 pagePult Ceo 1Dragan ŠašićPas encore d'évaluation
- Tda 2822Document11 pagesTda 2822Dragan ŠašićPas encore d'évaluation
- Structured Text Programming: PLC ST - 19.1Document20 pagesStructured Text Programming: PLC ST - 19.1Dragan ŠašićPas encore d'évaluation
- TB6600 DatasheetDocument33 pagesTB6600 DatasheetDragan ŠašićPas encore d'évaluation
- ProbaDocument1 pageProbaDragan ŠašićPas encore d'évaluation
- Gear Trax 2007Document69 pagesGear Trax 2007fbrissoPas encore d'évaluation
- MID 130 PID 161 Input Shaft, Rotation SpeedDocument1 pageMID 130 PID 161 Input Shaft, Rotation SpeedhadiPas encore d'évaluation
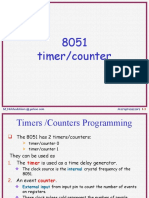
- 5 Timer (Part 1)Document29 pages5 Timer (Part 1)lsuwdaa100% (1)
- Project Report On Bottle Filling PlantDocument24 pagesProject Report On Bottle Filling PlantVishal Saini100% (3)
- Iso 10245 2 2014 en PDFDocument8 pagesIso 10245 2 2014 en PDFANDYZHUANGPas encore d'évaluation
- Smart Home 9504 PDFDocument28 pagesSmart Home 9504 PDFJefferson ClaytonPas encore d'évaluation
- cbr250rr 2021Document115 pagescbr250rr 2021Sam SamiPas encore d'évaluation
- DL Manual - Com Vs Controller Gs Driver p100 Operating ManualDocument124 pagesDL Manual - Com Vs Controller Gs Driver p100 Operating ManualThiago Teixeira PiresPas encore d'évaluation
- Despiece Hidrojet K310 1.994-680.0 PDFDocument12 pagesDespiece Hidrojet K310 1.994-680.0 PDFjose velascoPas encore d'évaluation
- Alto Mistral 2500, 4000Document46 pagesAlto Mistral 2500, 4000wacawaca100% (1)
- IRFP450Document8 pagesIRFP450Erick DavidPas encore d'évaluation
- Electric Motors Components: Compensation Rings (Lmkas) and Adjustment Plain Rings (Ram)Document2 pagesElectric Motors Components: Compensation Rings (Lmkas) and Adjustment Plain Rings (Ram)RM HaroonPas encore d'évaluation
- K2042 ManualDocument20 pagesK2042 ManualAthanasios S. ArampatzisPas encore d'évaluation
- GOT1000 HandbookDocument220 pagesGOT1000 HandbookREDDYGAARI ABBAYI100% (1)
- Retail Price List (01.07.2023) - For Website & General CirculationDocument1 pageRetail Price List (01.07.2023) - For Website & General CirculationBilal Cable dealerPas encore d'évaluation
- 04.CH430-03 Operators Instructions S223.1111-01 en-USDocument44 pages04.CH430-03 Operators Instructions S223.1111-01 en-USAtef YagoubiPas encore d'évaluation
- Series 9180/ 9270 Power AmplifierDocument20 pagesSeries 9180/ 9270 Power AmplifierCouger ForuPas encore d'évaluation
- Rate List of Plumbing Work180208Document1 pageRate List of Plumbing Work180208Kiran KDzPas encore d'évaluation
- Diagrama de TV Proyeccion Sony KP-53V90Document120 pagesDiagrama de TV Proyeccion Sony KP-53V90Antonio ChavezPas encore d'évaluation
- MWE-9501 - Manual de Serviço (EN) (2004.10)Document72 pagesMWE-9501 - Manual de Serviço (EN) (2004.10)Thiago AzevedoPas encore d'évaluation
- Certificates FormatDocument10 pagesCertificates FormatJohn Christopher JusayanPas encore d'évaluation
- Board Label Qty Manufacturer Part NumberDocument6 pagesBoard Label Qty Manufacturer Part NumberestrallatorPas encore d'évaluation
- User Manual: SDS1000 Series Digital Storage Oscilloscope Version No.: V 1.2Document148 pagesUser Manual: SDS1000 Series Digital Storage Oscilloscope Version No.: V 1.2juampicPas encore d'évaluation
- Block Diagram SchematicsDocument16 pagesBlock Diagram SchematicsViegasBottcherPas encore d'évaluation
- Kubota Tractor B21 Parts CatalogDocument200 pagesKubota Tractor B21 Parts CatalogSAGAR GUPTAPas encore d'évaluation
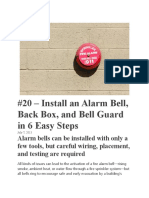
- Install An Alarm Bell, Back Box, and Bell Guard in 6 Easy StepsDocument9 pagesInstall An Alarm Bell, Back Box, and Bell Guard in 6 Easy StepsSofiqPas encore d'évaluation
- Fan From DeltaDocument38 pagesFan From DeltaJeff SunPas encore d'évaluation
- 480 Volt Corner Grounded Delta - Friend or Foe PDFDocument8 pages480 Volt Corner Grounded Delta - Friend or Foe PDFRajuPas encore d'évaluation
- P-3 Orion (Natops Numbers) "Rick James Version": Airspeed SHP ZFW / Load Limits Min Alt On StationDocument2 pagesP-3 Orion (Natops Numbers) "Rick James Version": Airspeed SHP ZFW / Load Limits Min Alt On StationpepePas encore d'évaluation
- Lecture - 6 - DC To DC (Choppers) - W2017 PDFDocument47 pagesLecture - 6 - DC To DC (Choppers) - W2017 PDFAhmad AliPas encore d'évaluation
- Keywords: Mobile Phones, DTMF Decoder, ControllerDocument4 pagesKeywords: Mobile Phones, DTMF Decoder, Controllermanoj260191Pas encore d'évaluation