Vous aimerez peut-être aussi
- Control of DC Motor Using Different Control StrategiesD'EverandControl of DC Motor Using Different Control StrategiesPas encore d'évaluation
- 1 From Classical Control To Fuzzy Logic ControlDocument15 pages1 From Classical Control To Fuzzy Logic Controlknightfelix12Pas encore d'évaluation
- 1 - 15 PDFDocument15 pages1 - 15 PDFknightfelix12100% (1)
- A Comparison of Robustness: Fuzzy Logic, PID, & Sliding Mode ControlDocument6 pagesA Comparison of Robustness: Fuzzy Logic, PID, & Sliding Mode ControlinfodotzPas encore d'évaluation
- Control of An Unstable Inverted Pendulum SystemDocument11 pagesControl of An Unstable Inverted Pendulum SystemShivankyJaiswalPas encore d'évaluation
- Implementation of Inverted Pendulum Control, Plunks On Miscellaneous TacticsDocument6 pagesImplementation of Inverted Pendulum Control, Plunks On Miscellaneous TacticsirqoviPas encore d'évaluation
- Paper UksimDocument6 pagesPaper Uksimsattanic666Pas encore d'évaluation
- Performance Comparison Between LQR and PID Controller For An Inverted Pendulum SystemDocument5 pagesPerformance Comparison Between LQR and PID Controller For An Inverted Pendulum SystemSanjiv CrPas encore d'évaluation
- Fractional Order PID Controller Tuning Based On IMCDocument15 pagesFractional Order PID Controller Tuning Based On IMCijitcajournalPas encore d'évaluation
- Fuzzy Sliding Mode Controller (FSMC) With Global Stabilization and Saturation Function For Tracking Control of A Robotic ManipulatorDocument7 pagesFuzzy Sliding Mode Controller (FSMC) With Global Stabilization and Saturation Function For Tracking Control of A Robotic ManipulatormaryfghPas encore d'évaluation
- Diseño-Guia 6 (PID Controller)Document8 pagesDiseño-Guia 6 (PID Controller)RhinometalI&CPas encore d'évaluation
- Module 5 PDFDocument11 pagesModule 5 PDFRajath Upadhya100% (1)
- Koi Sap 2009Document6 pagesKoi Sap 2009farhan beighPas encore d'évaluation
- Lab 1Document4 pagesLab 1Abdalla Fathy100% (1)
- Unesco - Eolss Sample Chapters: Controller Design in Time-DomainDocument9 pagesUnesco - Eolss Sample Chapters: Controller Design in Time-DomainAnonymous EPSHB9tXZPas encore d'évaluation
- An Intelligent Hybrid Fuzzy Pid ControllerDocument5 pagesAn Intelligent Hybrid Fuzzy Pid ControllerAmmar YounasPas encore d'évaluation
- DC Motor Position Control Using Fuzzy Proportional-Derivative Controllers With Different Defuzzification MethodsDocument11 pagesDC Motor Position Control Using Fuzzy Proportional-Derivative Controllers With Different Defuzzification MethodsLele glosyPas encore d'évaluation
- Design of Missile Two-Loop Auto-Pilot Pitch Using Root LocusDocument6 pagesDesign of Missile Two-Loop Auto-Pilot Pitch Using Root LocusLukkana VaraprasadPas encore d'évaluation
- L1AdaptCntrl CSM Oct2011Document52 pagesL1AdaptCntrl CSM Oct2011alexanderkalePas encore d'évaluation
- p311 PDFDocument9 pagesp311 PDFmohammad naseemPas encore d'évaluation
- Autotronics and Vehicle Intelligence : Aeng6205Document25 pagesAutotronics and Vehicle Intelligence : Aeng6205Abubaker MuzayinPas encore d'évaluation
- Simulation work on Fractional Order PIλ Control Strategy for speed control of DC motor based on stability boundary locus methodDocument7 pagesSimulation work on Fractional Order PIλ Control Strategy for speed control of DC motor based on stability boundary locus methodseventhsensegroupPas encore d'évaluation
- Multiloop Control SystemDocument4 pagesMultiloop Control SystemAkash SahaPas encore d'évaluation
- A0408 05-0112 PDFDocument12 pagesA0408 05-0112 PDFIJMERPas encore d'évaluation
- Position Control of Brushed DC Motor Using Pid Controller in MatlabDocument5 pagesPosition Control of Brushed DC Motor Using Pid Controller in MatlabJournal 4 Research100% (1)
- Ica20110200001 94894672Document8 pagesIca20110200001 94894672Anggara T NugrahaPas encore d'évaluation
- BTEC Unit 82 HND AerospaceDocument14 pagesBTEC Unit 82 HND AerospaceCraig JonesPas encore d'évaluation
- Synergetic ControlDocument13 pagesSynergetic Controlrostamkola1229Pas encore d'évaluation
- Study of Fuzzy-PID Control in MATLAB For Two-Phase Hybrid Stepping Motor ZHANG Shengyi and WANG XinmingDocument4 pagesStudy of Fuzzy-PID Control in MATLAB For Two-Phase Hybrid Stepping Motor ZHANG Shengyi and WANG XinmingMadhusmita BeheraPas encore d'évaluation
- Letters: Stable and Optimal Fuzzy Control of Linear SystemsDocument7 pagesLetters: Stable and Optimal Fuzzy Control of Linear Systemsengelx1x2x3Pas encore d'évaluation
- Multi-Loop Decentralized PID Control Based On Covariance Control Criteria: An LMI ApproachDocument15 pagesMulti-Loop Decentralized PID Control Based On Covariance Control Criteria: An LMI ApproachmathivazhanPas encore d'évaluation
- KKJJJJJJJBDocument5 pagesKKJJJJJJJBVigneshRamakrishnanPas encore d'évaluation
- Self-Tuning of Fuzzy Logic Controllers in Cascade LoopsDocument8 pagesSelf-Tuning of Fuzzy Logic Controllers in Cascade LoopsCarlos BellatinPas encore d'évaluation
- Fuzzy Logic Control vs. Conventional PID Control of An Inverted Pendulum RobotDocument6 pagesFuzzy Logic Control vs. Conventional PID Control of An Inverted Pendulum RobotMiguelPas encore d'évaluation
- Koshkouei A Burnham KJ Control of DC Motors Using Proportional Integral Sliding Mode - 2Document6 pagesKoshkouei A Burnham KJ Control of DC Motors Using Proportional Integral Sliding Mode - 2manly2909Pas encore d'évaluation
- The Speed and Torque Control of Direct Current Servo Motors by Using Cascade Fuzzy PI ControllerDocument5 pagesThe Speed and Torque Control of Direct Current Servo Motors by Using Cascade Fuzzy PI ControllerAndy MeyerPas encore d'évaluation
- Fractional Order PID Control of Rotor Suspension by Active Magnetic BearingsDocument31 pagesFractional Order PID Control of Rotor Suspension by Active Magnetic BearingsNguyen Van QuyenPas encore d'évaluation
- Modelling & Simulation For Optimal Control of Nonlinear Inverted Pendulum Dynamical System Using PID Controller & LQRDocument6 pagesModelling & Simulation For Optimal Control of Nonlinear Inverted Pendulum Dynamical System Using PID Controller & LQRtamsidebd87Pas encore d'évaluation
- dSPACE Implementation of Fuzzy Logic Based Vector Control of Induction MotorDocument6 pagesdSPACE Implementation of Fuzzy Logic Based Vector Control of Induction MotorAshwani RanaPas encore d'évaluation
- Implementing Ball Balancing Beam Using Digital Image Processing and Fuzzy LogicDocument4 pagesImplementing Ball Balancing Beam Using Digital Image Processing and Fuzzy LogicJessica RossPas encore d'évaluation
- Robust Adaptive Controller Design For Excavator Arm: Nga Thi-Thuy VuDocument6 pagesRobust Adaptive Controller Design For Excavator Arm: Nga Thi-Thuy VuAsif SaleemPas encore d'évaluation
- Multiobjective Control For A Linear Brushless DC Motor: An Evolutionary ApproachDocument10 pagesMultiobjective Control For A Linear Brushless DC Motor: An Evolutionary ApproachlcheekalaPas encore d'évaluation
- An Aeroload SimulatorDocument71 pagesAn Aeroload SimulatorNikunj AgarwalPas encore d'évaluation
- Internal Model Control II PDFDocument9 pagesInternal Model Control II PDFOualid LamraouiPas encore d'évaluation
- Design and Analysis of Control System For An Unmanned FreeSwimming Submersible Vehicle Under Hydrodynamic Disturbances Design With Lead, PID and LQR ControllersDocument42 pagesDesign and Analysis of Control System For An Unmanned FreeSwimming Submersible Vehicle Under Hydrodynamic Disturbances Design With Lead, PID and LQR ControllersAMNA SAMI100% (1)
- College of Engineering and TechnologyDocument27 pagesCollege of Engineering and TechnologyAbdeta TerfaPas encore d'évaluation
- Principles of Automatic ControlDocument26 pagesPrinciples of Automatic ControlMesut OzilPas encore d'évaluation
- Simulation of Optimal Speed Control For A DC Motor Using Linear Quadratic Regulator (LQR)Document10 pagesSimulation of Optimal Speed Control For A DC Motor Using Linear Quadratic Regulator (LQR)naghamPas encore d'évaluation
- 3571 PDFDocument4 pages3571 PDFAuliaPas encore d'évaluation
- Cs Project Report: Comparative Analysis of P, I, D, PI, PD, PID On Speed Control of DC Motor Using MATLAB SimulinkDocument25 pagesCs Project Report: Comparative Analysis of P, I, D, PI, PD, PID On Speed Control of DC Motor Using MATLAB Simulink2K19/EE/259 TUSHARPas encore d'évaluation
- 473068.burul Kolonic Matusko Iz CD-ADocument6 pages473068.burul Kolonic Matusko Iz CD-Ajhephe46Pas encore d'évaluation
- Fuzzy PID Controllers Using FPGA Technique For Real Time DC Motor Speed ControlDocument8 pagesFuzzy PID Controllers Using FPGA Technique For Real Time DC Motor Speed ControlsphinxvnnPas encore d'évaluation
- Robust Iterative PID Controller Based On Linear Matrix Inequality For A Sample Power SystemDocument9 pagesRobust Iterative PID Controller Based On Linear Matrix Inequality For A Sample Power Systemsjo05Pas encore d'évaluation
- Tuning PI Controllers For Stable Processes With Specifications On Gain and Phase MarginsDocument8 pagesTuning PI Controllers For Stable Processes With Specifications On Gain and Phase MarginsKapilSahuPas encore d'évaluation
- Control Steam Turbine Combined Cycle Power Plant Based On Soft ComputingDocument6 pagesControl Steam Turbine Combined Cycle Power Plant Based On Soft Computingleanhhai1080Pas encore d'évaluation
- Speed Regulation of Induction Motor Using Sliding Mode Control SchemeDocument5 pagesSpeed Regulation of Induction Motor Using Sliding Mode Control SchemeranaateeqPas encore d'évaluation
- CNC Mid 2 KeyDocument6 pagesCNC Mid 2 Keypala srinivas reddyPas encore d'évaluation
- Hitide 2i (BP)Document4 pagesHitide 2i (BP)Biju_PottayilPas encore d'évaluation
- Yale PD2, C85, D85Document28 pagesYale PD2, C85, D85LGWILDCAT73Pas encore d'évaluation
- SA-6 Press KitDocument53 pagesSA-6 Press KitBob Andrepont100% (1)
- AGMA 9002-A86 Inch Bore and ANSI B17.1 Square Keyway TolerancesDocument6 pagesAGMA 9002-A86 Inch Bore and ANSI B17.1 Square Keyway TolerancesEmmanuel García100% (1)
- Heydar Aliyev Cultural Centre: StructureDocument3 pagesHeydar Aliyev Cultural Centre: Structurenusha rakhePas encore d'évaluation
- Planning For Procurement of Construction ContractsDocument41 pagesPlanning For Procurement of Construction ContractsJoel AlcantaraPas encore d'évaluation
- ENG052010 Mechanic JD - 2Document1 pageENG052010 Mechanic JD - 2Satria SujatmikoPas encore d'évaluation
- Crashing QuestionsDocument3 pagesCrashing QuestionsSYED ASGHAR ALI SULTANPas encore d'évaluation
- Catalogue For AutoDocument22 pagesCatalogue For Autosentimiento azulPas encore d'évaluation
- Shell Spirax S6 Txme: Performance, Features & BenefitsDocument2 pagesShell Spirax S6 Txme: Performance, Features & BenefitsAbdelhadi HoussinPas encore d'évaluation
- Mov BiffiDocument177 pagesMov BiffiSKPas encore d'évaluation
- Assignment Booklet Me2353 Finite Element Analysis Dec 2013 May 2014Document85 pagesAssignment Booklet Me2353 Finite Element Analysis Dec 2013 May 2014Ashok Kumar Rajendran100% (9)
- SVT-RM10: Remote Control UnitDocument2 pagesSVT-RM10: Remote Control UnitJOGITELEPas encore d'évaluation
- WBNR La Auto BCM SpanishDocument41 pagesWBNR La Auto BCM SpanishHaragopal KrishnaPas encore d'évaluation
- The Holographic Universe - Simulation Hypothesis - CrystalinksDocument29 pagesThe Holographic Universe - Simulation Hypothesis - CrystalinkssalatiePas encore d'évaluation
- Data Warehousing Quick GuideDocument66 pagesData Warehousing Quick Guidejacktheking2010Pas encore d'évaluation
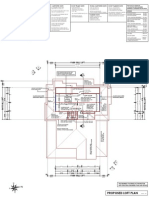
- LoftplanDocument1 pageLoftplanapi-228799117Pas encore d'évaluation
- Diprotic Acid Titration Calculation Worked Example Sulphuric Acid and Sodium Hydroxide - mp4Document2 pagesDiprotic Acid Titration Calculation Worked Example Sulphuric Acid and Sodium Hydroxide - mp4tobiloba temiPas encore d'évaluation
- Statistical Process Control & Cost of QualityDocument114 pagesStatistical Process Control & Cost of QualityAshraf S. Youssef100% (2)
- Valtra Tractor All Model Diagnostics and Programming ManualDocument22 pagesValtra Tractor All Model Diagnostics and Programming Manualpicax1879100% (17)
- Mobil DTE 20 Series - Marketing Asset - Display & POS Support Material - Performance ProfileDocument2 pagesMobil DTE 20 Series - Marketing Asset - Display & POS Support Material - Performance Profilethammarat khruasonkhamPas encore d'évaluation
- Phychem Expt #2Document7 pagesPhychem Expt #2Candace AguilarPas encore d'évaluation
- A N Engineering Report On Unit 8: Engineering Design, Assignment 2 - Use of Computer Based Technology in Engineering DesignDocument14 pagesA N Engineering Report On Unit 8: Engineering Design, Assignment 2 - Use of Computer Based Technology in Engineering DesignTop Engineering SolutionsPas encore d'évaluation
- Nokia c7-00 Rm-675 Rm-691 Service Manual-12 v6Document32 pagesNokia c7-00 Rm-675 Rm-691 Service Manual-12 v6sasquatch69Pas encore d'évaluation
- Enemy Territory - Quake Wars - ManualDocument22 pagesEnemy Territory - Quake Wars - ManualM_MolliPas encore d'évaluation
- Gopakumar 2002Document9 pagesGopakumar 2002mihaela_myky14Pas encore d'évaluation
- Detailed Lesson Plan in IctDocument4 pagesDetailed Lesson Plan in IctJai AidamusPas encore d'évaluation
- Assignment 1 Low Temperature and SuperconductivityDocument3 pagesAssignment 1 Low Temperature and SuperconductivityNadhrah MuradPas encore d'évaluation
- b-737 - Rev 59 PDFDocument402 pagesb-737 - Rev 59 PDFCatevario NegroPas encore d'évaluation
- WPCE Pump-In Sub by NOV ELMARDocument1 pageWPCE Pump-In Sub by NOV ELMARvipequi50Pas encore d'évaluation
- Evaluation of Some Websites that Offer Virtual Phone Numbers for SMS Reception and Websites to Obtain Virtual Debit/Credit Cards for Online Accounts VerificationsD'EverandEvaluation of Some Websites that Offer Virtual Phone Numbers for SMS Reception and Websites to Obtain Virtual Debit/Credit Cards for Online Accounts VerificationsÉvaluation : 5 sur 5 étoiles5/5 (1)
- Hacking: A Beginners Guide To Your First Computer Hack; Learn To Crack A Wireless Network, Basic Security Penetration Made Easy and Step By Step Kali LinuxD'EverandHacking: A Beginners Guide To Your First Computer Hack; Learn To Crack A Wireless Network, Basic Security Penetration Made Easy and Step By Step Kali LinuxÉvaluation : 4.5 sur 5 étoiles4.5/5 (67)
- Microsoft Azure Infrastructure Services for Architects: Designing Cloud SolutionsD'EverandMicrosoft Azure Infrastructure Services for Architects: Designing Cloud SolutionsPas encore d'évaluation
- Microsoft Certified Azure Fundamentals Study Guide: Exam AZ-900D'EverandMicrosoft Certified Azure Fundamentals Study Guide: Exam AZ-900Pas encore d'évaluation
- Cybersecurity: A Simple Beginner’s Guide to Cybersecurity, Computer Networks and Protecting Oneself from Hacking in the Form of Phishing, Malware, Ransomware, and Social EngineeringD'EverandCybersecurity: A Simple Beginner’s Guide to Cybersecurity, Computer Networks and Protecting Oneself from Hacking in the Form of Phishing, Malware, Ransomware, and Social EngineeringÉvaluation : 5 sur 5 étoiles5/5 (40)
- AWS Certified Solutions Architect Study Guide: Associate SAA-C02 ExamD'EverandAWS Certified Solutions Architect Study Guide: Associate SAA-C02 ExamPas encore d'évaluation
- Cybersecurity: The Beginner's Guide: A comprehensive guide to getting started in cybersecurityD'EverandCybersecurity: The Beginner's Guide: A comprehensive guide to getting started in cybersecurityÉvaluation : 5 sur 5 étoiles5/5 (2)
- Set Up Your Own IPsec VPN, OpenVPN and WireGuard Server: Build Your Own VPND'EverandSet Up Your Own IPsec VPN, OpenVPN and WireGuard Server: Build Your Own VPNÉvaluation : 5 sur 5 étoiles5/5 (1)
- The Compete Ccna 200-301 Study Guide: Network Engineering EditionD'EverandThe Compete Ccna 200-301 Study Guide: Network Engineering EditionÉvaluation : 5 sur 5 étoiles5/5 (4)
- Alcatel-Lucent Service Routing Architect (SRA) Self-Study Guide: Preparing for the BGP, VPRN and Multicast ExamsD'EverandAlcatel-Lucent Service Routing Architect (SRA) Self-Study Guide: Preparing for the BGP, VPRN and Multicast ExamsPas encore d'évaluation
- Networking Fundamentals: Develop the networking skills required to pass the Microsoft MTA Networking Fundamentals Exam 98-366D'EverandNetworking Fundamentals: Develop the networking skills required to pass the Microsoft MTA Networking Fundamentals Exam 98-366Pas encore d'évaluation
- Azure Networking: Command Line Mastery From Beginner To ArchitectD'EverandAzure Networking: Command Line Mastery From Beginner To ArchitectPas encore d'évaluation
- ITIL® 4 Create, Deliver and Support (CDS): Your companion to the ITIL 4 Managing Professional CDS certificationD'EverandITIL® 4 Create, Deliver and Support (CDS): Your companion to the ITIL 4 Managing Professional CDS certificationÉvaluation : 5 sur 5 étoiles5/5 (2)
- Concise Guide to OTN optical transport networksD'EverandConcise Guide to OTN optical transport networksÉvaluation : 4 sur 5 étoiles4/5 (2)
- AWS Certified Cloud Practitioner Study Guide: CLF-C01 ExamD'EverandAWS Certified Cloud Practitioner Study Guide: CLF-C01 ExamÉvaluation : 5 sur 5 étoiles5/5 (1)
- Computer Networking: The Complete Guide to Understanding Wireless Technology, Network Security, Computer Architecture and Communications Systems (Including Cisco, CCNA and CCENT)D'EverandComputer Networking: The Complete Guide to Understanding Wireless Technology, Network Security, Computer Architecture and Communications Systems (Including Cisco, CCNA and CCENT)Pas encore d'évaluation
- Computer Systems and Networking Guide: A Complete Guide to the Basic Concepts in Computer Systems, Networking, IP Subnetting and Network SecurityD'EverandComputer Systems and Networking Guide: A Complete Guide to the Basic Concepts in Computer Systems, Networking, IP Subnetting and Network SecurityÉvaluation : 4.5 sur 5 étoiles4.5/5 (13)
- Internet of Things: Principles and ParadigmsD'EverandInternet of Things: Principles and ParadigmsÉvaluation : 4.5 sur 5 étoiles4.5/5 (6)
- Open Radio Access Network (O-RAN) Systems Architecture and DesignD'EverandOpen Radio Access Network (O-RAN) Systems Architecture and DesignPas encore d'évaluation