Vous aimerez peut-être aussi
- Power System Fault LabDocument13 pagesPower System Fault LabShubham DwivediPas encore d'évaluation
- Module IV Fault Analysis & Short Circuit CalculationsDocument14 pagesModule IV Fault Analysis & Short Circuit Calculationsbobby4u143Pas encore d'évaluation
- Fault Analysis - 2019-02-23 (DOE) 2 SlidesDocument120 pagesFault Analysis - 2019-02-23 (DOE) 2 SlidesCatrina FedericoPas encore d'évaluation
- Practical AssesmentDocument4 pagesPractical AssesmentmidunPas encore d'évaluation
- UNSW - ELECTRICAL ENGINEERING AND TELECOMMUNICATIONS POWER SYSTEM ANALYSIS LABDocument4 pagesUNSW - ELECTRICAL ENGINEERING AND TELECOMMUNICATIONS POWER SYSTEM ANALYSIS LABDavid VangPas encore d'évaluation
- Calculations of Short Circuit CurrentsDocument9 pagesCalculations of Short Circuit CurrentsCorneliusmusyokaPas encore d'évaluation
- Lec 2Document13 pagesLec 2Chamod DissanayakePas encore d'évaluation
- Psa Unit 4Document21 pagesPsa Unit 4Aish KrishPas encore d'évaluation
- Short Circuit CalculationsDocument10 pagesShort Circuit CalculationsvenkateshbitraPas encore d'évaluation
- Symmetrical Componet Fauly CalculationDocument522 pagesSymmetrical Componet Fauly CalculationsreedharPas encore d'évaluation
- Three Phase Power System Operation OverviewDocument17 pagesThree Phase Power System Operation OverviewSingam SridharPas encore d'évaluation
- Detect faults and overvoltages in ungrounded power systemsDocument16 pagesDetect faults and overvoltages in ungrounded power systemssimonPas encore d'évaluation
- Power System Analysis: Three Phase, Power System Operation Tom Overbye and Ross BaldickDocument22 pagesPower System Analysis: Three Phase, Power System Operation Tom Overbye and Ross BaldickAlexander MartinPas encore d'évaluation
- Fault Calculations ExplainedDocument37 pagesFault Calculations ExplainedJASPER PAYAPAYAPas encore d'évaluation
- Short Circuit NotesDocument45 pagesShort Circuit NotesReynantePas encore d'évaluation
- 133Document5 pages133Rasool Bux RajarPas encore d'évaluation
- IEC 60909 Fault Current StandardDocument9 pagesIEC 60909 Fault Current StandardMKPas encore d'évaluation
- IEC 60909 Fault Current StandardDocument9 pagesIEC 60909 Fault Current StandardMKPas encore d'évaluation
- Balanced Faults ExplainedDocument31 pagesBalanced Faults ExplainedFaiza Tabassam 546-FET/BSEE/F19Pas encore d'évaluation
- Basic Circuit TheoryDocument11 pagesBasic Circuit Theoryjorge william ramirezPas encore d'évaluation
- Ee6501 Psa Eee VST Au Units IVDocument24 pagesEe6501 Psa Eee VST Au Units IVManeesh K ChaudharyPas encore d'évaluation
- Symmetricalfault PPTDocument22 pagesSymmetricalfault PPTpriyanshum230825eePas encore d'évaluation
- Power System FaultsDocument57 pagesPower System Faultsmuaz_aminu142283% (6)
- Electrical Fault Calculation - Positive Negative Zero Sequence ImpedanceDocument8 pagesElectrical Fault Calculation - Positive Negative Zero Sequence ImpedanceMehrdad Nirui100% (1)
- Short CircuitDocument30 pagesShort CircuitRa ArPas encore d'évaluation
- Fault Current Calculations in Electrical SystemsDocument11 pagesFault Current Calculations in Electrical SystemsSureshraja9977Pas encore d'évaluation
- ESL3 PhaseSymmetrical FaultsDocument11 pagesESL3 PhaseSymmetrical FaultsChelle Mendoza EslavaPas encore d'évaluation
- Transmission Line Fault Monitoring Project ReportDocument34 pagesTransmission Line Fault Monitoring Project ReportBhushan Jichkar76% (21)
- Chapter 2Document11 pagesChapter 2Aung MyatPas encore d'évaluation
- American International University - Bangladesh (Aiub) : Power System Analysis (Section: B)Document5 pagesAmerican International University - Bangladesh (Aiub) : Power System Analysis (Section: B)M. K. RashedinPas encore d'évaluation
- Bridge Man 00Document6 pagesBridge Man 00Anonymous NGXdt2BxPas encore d'évaluation
- Zoom 16Document90 pagesZoom 16ATHAR IQBALPas encore d'évaluation
- System Protection Chapter 2Document19 pagesSystem Protection Chapter 2Almiqdad AldeekPas encore d'évaluation
- Symmetrical Faults On 3 Phase SystemDocument10 pagesSymmetrical Faults On 3 Phase Systemprincess doctoleroPas encore d'évaluation
- Faults Are Classified in Two Types: 1. Balanced Faults 2. Unbalanced FaultsDocument5 pagesFaults Are Classified in Two Types: 1. Balanced Faults 2. Unbalanced FaultsRasool Bux RajarPas encore d'évaluation
- Básico de cIRCUITOS ELETRICOSDocument10 pagesBásico de cIRCUITOS ELETRICOSWellington FrançaPas encore d'évaluation
- EE61 Power System AnalysisDocument3 pagesEE61 Power System AnalysisMartin De Boras PragashPas encore d'évaluation
- Zerosequence ImpedanceDocument16 pagesZerosequence ImpedancecisnatelPas encore d'évaluation
- CHPT 4Document54 pagesCHPT 4Yahya Faiez Waqqad0% (1)
- Protective Relay SettingsDocument20 pagesProtective Relay SettingsChân Gà NướngPas encore d'évaluation
- CAT 910 Basic CircuiteDocument6 pagesCAT 910 Basic CircuiteYober Emilio Nato AcostaPas encore d'évaluation
- 4 LabDocument6 pages4 LabLatif Ismail ShaikhPas encore d'évaluation
- Electrical Fault Calculation Positive Negative Zero Sequence ImpedanceDocument7 pagesElectrical Fault Calculation Positive Negative Zero Sequence ImpedanceGourav KumarPas encore d'évaluation
- CAT-Basic Circuit Theory PDFDocument11 pagesCAT-Basic Circuit Theory PDFmehdi kamaliPas encore d'évaluation
- Symmetrical FaultDocument54 pagesSymmetrical FaultshinkazamaPas encore d'évaluation
- PSA - Lecture 6 - Symmetrical Fault Analysis (Part-1) - MAZSDocument45 pagesPSA - Lecture 6 - Symmetrical Fault Analysis (Part-1) - MAZSAsikur Hasan SaumikPas encore d'évaluation
- Three Phase Faults - Muhit - Part1 (Version1)Document6 pagesThree Phase Faults - Muhit - Part1 (Version1)Ismat AraPas encore d'évaluation
- Model Over Current RelayDocument7 pagesModel Over Current RelayHayat AnsariPas encore d'évaluation
- Local Media5941271462837301265Document65 pagesLocal Media5941271462837301265jason mr.perfect11Pas encore d'évaluation
- Symmetrical Fault Analysis in Power SystemsDocument14 pagesSymmetrical Fault Analysis in Power Systemsstudents answerPas encore d'évaluation
- General Safety Measures of Electromechanical System LabDocument7 pagesGeneral Safety Measures of Electromechanical System LabAbdul HaseebPas encore d'évaluation
- According To The IEC 60909Document15 pagesAccording To The IEC 60909Ten ApolinarioPas encore d'évaluation
- Project Report Transmission Line Fault MonitoringDocument34 pagesProject Report Transmission Line Fault Monitoringkra_amPas encore d'évaluation
- Simulation of Extra High Voltage Long Transmission LinesDocument18 pagesSimulation of Extra High Voltage Long Transmission LinesAaryarohit NaskarPas encore d'évaluation
- Teoria de Los Circuitos BasicosDocument11 pagesTeoria de Los Circuitos BasicosPepe AlonzoPas encore d'évaluation
- FEP 20MW DG Set Power System AnalysisDocument40 pagesFEP 20MW DG Set Power System AnalysisCharles EastlandPas encore d'évaluation
- Short-Circuit Calculations: 4.1 Symmetrical ComponentsDocument21 pagesShort-Circuit Calculations: 4.1 Symmetrical ComponentsYahya GharbiPas encore d'évaluation
- Introduction to Power System ProtectionD'EverandIntroduction to Power System ProtectionPas encore d'évaluation
- Introduction to Power System ProtectionD'EverandIntroduction to Power System ProtectionÉvaluation : 5 sur 5 étoiles5/5 (1)
- Gs 100Document6 pagesGs 100mani_87Pas encore d'évaluation
- ESP8266 Serial EspDocument12 pagesESP8266 Serial EspsenadinPas encore d'évaluation
- CCNA2 Ver 4.1 98% SuccessDocument13 pagesCCNA2 Ver 4.1 98% Successmani_87Pas encore d'évaluation
- CCNA 3 Final Exam Updated 02may2009Document29 pagesCCNA 3 Final Exam Updated 02may2009nhatbui232Pas encore d'évaluation
- A Comprehensive TutorialDocument119 pagesA Comprehensive TutorialMayank KamraPas encore d'évaluation
- Sim300 HD V4.01Document70 pagesSim300 HD V4.01mani_87Pas encore d'évaluation
- Simple Statistical Path Loss Model for Indoor CommunicationsDocument7 pagesSimple Statistical Path Loss Model for Indoor Communicationsmani_87Pas encore d'évaluation
- Simple Statistical Path Loss Model for Indoor CommunicationsDocument7 pagesSimple Statistical Path Loss Model for Indoor Communicationsmani_87Pas encore d'évaluation
- Specifications Dimension: (Unit: MM) 55SVH7EDocument1 pageSpecifications Dimension: (Unit: MM) 55SVH7Edervis quinteroPas encore d'évaluation
- E500 FD Rel11 Part6 RTU FunctionsDocument113 pagesE500 FD Rel11 Part6 RTU FunctionsЖорж КаназирскиPas encore d'évaluation
- Modulation Techniques and DemodulationDocument59 pagesModulation Techniques and DemodulationMahmoud ElbaroudyPas encore d'évaluation
- OWON SDS1000 Series Spec PDFDocument2 pagesOWON SDS1000 Series Spec PDFAlex ZXPas encore d'évaluation
- Atx and p4 Power SuppliesDocument6 pagesAtx and p4 Power SuppliesSantosh DevadePas encore d'évaluation
- Fundamentals of Electromagnetics by UlabyDocument2 pagesFundamentals of Electromagnetics by UlabyhistandPas encore d'évaluation
- IEEMA June 2020 - Generator 95% Stator Earth Fault and Its CalculationDocument5 pagesIEEMA June 2020 - Generator 95% Stator Earth Fault and Its CalculationVishal Kumar LaddhaPas encore d'évaluation
- Application of Instrument Transformers - CTDocument24 pagesApplication of Instrument Transformers - CTKaran TripathiPas encore d'évaluation
- Synthesis Services for Physical Design, STA, DFT and VerificationDocument11 pagesSynthesis Services for Physical Design, STA, DFT and VerificationHARISH DAMARLAPas encore d'évaluation
- ELS 04 Agustus 2023Document20 pagesELS 04 Agustus 2023Yenatha SantosaPas encore d'évaluation
- Honeywell S7830 SpecDocument16 pagesHoneywell S7830 SpecAndres ParedesPas encore d'évaluation
- BE Computer EngneeringDocument677 pagesBE Computer Engneeringvirendra girasePas encore d'évaluation
- OneExpert 630 Extended QuickStart Guide V1aDocument153 pagesOneExpert 630 Extended QuickStart Guide V1ajuan guillermo zapataPas encore d'évaluation
- Poly X50Document4 pagesPoly X50Harsono WibowoPas encore d'évaluation
- Advanced Power Electronics Corp.: N-Channel Enhancement-Mode Power MOSFETDocument5 pagesAdvanced Power Electronics Corp.: N-Channel Enhancement-Mode Power MOSFETMuhammad ZahidPas encore d'évaluation
- Radar Assignment 1 SolDocument8 pagesRadar Assignment 1 Solfuckoff121gPas encore d'évaluation
- Measure Circuit Components with a Multimeter, Breadboard and Power SupplyDocument3 pagesMeasure Circuit Components with a Multimeter, Breadboard and Power SupplyashfaqiPas encore d'évaluation
- Von-Neuman Vs HarvardDocument14 pagesVon-Neuman Vs Harvardtango zonePas encore d'évaluation
- A XW-118 A XW-128 Ami-926lw/rwDocument34 pagesA XW-118 A XW-128 Ami-926lw/rwpata saladaPas encore d'évaluation
- Eetop - CN - FAST FOURIER TRANSFORM PROCESSOR DESIGNDocument186 pagesEetop - CN - FAST FOURIER TRANSFORM PROCESSOR DESIGNCarlos CalderonPas encore d'évaluation
- dwr-932 Man Revf1 1-00 Eu Multi 20210610Document99 pagesdwr-932 Man Revf1 1-00 Eu Multi 20210610Duje VidekaPas encore d'évaluation
- KC 31 - 32 e PDFDocument4 pagesKC 31 - 32 e PDFMichael CheungPas encore d'évaluation
- Phasor DiagramsDocument3 pagesPhasor Diagramspurushg62Pas encore d'évaluation
- Guangzhou HC Information Technology Co., LTD.: Product Data SheetDocument15 pagesGuangzhou HC Information Technology Co., LTD.: Product Data SheetCosmin ChiriţăPas encore d'évaluation
- Laser Based Intruder AlarmDocument22 pagesLaser Based Intruder AlarmKomal Praneeth Kota50% (2)
- S-Plane Bode Plots - Identifying Poles and Zeros in A Circuit Transfer FunctionDocument4 pagesS-Plane Bode Plots - Identifying Poles and Zeros in A Circuit Transfer FunctionTere BinPas encore d'évaluation
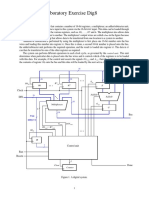
- Laboratory Exercise D: R0, - . - , R7 and A. The Multiplexer Also Allows DataDocument6 pagesLaboratory Exercise D: R0, - . - , R7 and A. The Multiplexer Also Allows DataMunya RushambwaPas encore d'évaluation
- Nokia ReportsDocument2 pagesNokia Reportsnarendraiit2003100% (3)
- Bridgewave Navigator Quick Start Manual 4Document4 pagesBridgewave Navigator Quick Start Manual 4ЮрийPas encore d'évaluation
- 3G Optimization Interview Topics SYAFRIZALDocument9 pages3G Optimization Interview Topics SYAFRIZALvishalkavi18Pas encore d'évaluation