Vous aimerez peut-être aussi
- Herramientas InteractivasDocument2 pagesHerramientas InteractivasAnonymous vwGHRxPas encore d'évaluation
- Evaluacion 5Document11 pagesEvaluacion 5Anonymous vwGHRx53% (15)
- Evaluacion de Modulo CeroDocument4 pagesEvaluacion de Modulo CeroAnonymous vwGHRxPas encore d'évaluation
- Estandares Minimos PDFDocument1 pageEstandares Minimos PDFAnonymous vwGHRxPas encore d'évaluation
- Evaluacion Semana UnoDocument7 pagesEvaluacion Semana UnoAnonymous vwGHRxPas encore d'évaluation
- Evaluacion Semana UnoDocument7 pagesEvaluacion Semana UnoAnonymous vwGHRxPas encore d'évaluation
- Evaluacion Semana CuatroDocument3 pagesEvaluacion Semana CuatroAnonymous vwGHRxPas encore d'évaluation
- Caracteristicas de La Respuesta InmuneDocument3 pagesCaracteristicas de La Respuesta InmuneAnonymous vwGHRx100% (2)
- Examen Redes de TelecomunicacionesDocument6 pagesExamen Redes de TelecomunicacionesAnonymous vwGHRxPas encore d'évaluation
- LEPIDOPTEROSDocument14 pagesLEPIDOPTEROSAnonymous vwGHRxPas encore d'évaluation
- Articulo Machine Learning en Modelos BIM PDFDocument11 pagesArticulo Machine Learning en Modelos BIM PDFYampiero13Pas encore d'évaluation
- ESCOLTAS Comportamiento Preventivo en SeguridadDocument33 pagesESCOLTAS Comportamiento Preventivo en SeguridadOswaldo Chomba CastroPas encore d'évaluation
- La Ingeniería de Sistema y Otras DisciplinasDocument8 pagesLa Ingeniería de Sistema y Otras DisciplinasHansSulluchucoValentin100% (1)
- Consultas SQLDocument3 pagesConsultas SQLpedroPas encore d'évaluation
- Sociedad Tecnologia y DerechoDocument8 pagesSociedad Tecnologia y Derechoalexander mamaniPas encore d'évaluation
- Tarea-SM08 Ejercicios de Codificación de La Fuente.Document15 pagesTarea-SM08 Ejercicios de Codificación de La Fuente.Joel Eduardo Cruz MenesesPas encore d'évaluation
- Diseño de Control Difuso Por Substitución de Control PIDDocument9 pagesDiseño de Control Difuso Por Substitución de Control PIDFarim I Argaez MontejoPas encore d'évaluation
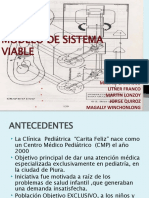
- Modelo de Sistema ViableDocument44 pagesModelo de Sistema ViableALEXANDRA TIMANA CORDOVAPas encore d'évaluation
- Inteligencia ArtificialretosyperspectivasDocument18 pagesInteligencia ArtificialretosyperspectivasVíctor Gutiérrez RoblesPas encore d'évaluation
- Practica 1 BD II - 2023Document3 pagesPractica 1 BD II - 2023cccPas encore d'évaluation
- Primera ClaseDocument7 pagesPrimera ClasebricenocjPas encore d'évaluation
- EFURDocument2 pagesEFURTrejo SergioPas encore d'évaluation
- Metsim Clienda en EsDocument5 pagesMetsim Clienda en EsjherryPas encore d'évaluation
- Machine Learning Desmitificado - Hackdo 2018Document58 pagesMachine Learning Desmitificado - Hackdo 2018Oscar RendonPas encore d'évaluation
- Inteligencia ArtificialDocument1 pageInteligencia ArtificialLUIS ARTURO ROCHA MENDEZPas encore d'évaluation
- Omron CJ1 AD041 SCL Analogi..Document8 pagesOmron CJ1 AD041 SCL Analogi..OGPas encore d'évaluation
- Imagenes BinariasDocument8 pagesImagenes BinariasJorge Andre Salcedo HurtadoPas encore d'évaluation
- Art. Historia IA - Constantino Malagon - 2002Document7 pagesArt. Historia IA - Constantino Malagon - 2002IsaiasVivasPas encore d'évaluation
- LUDWINGDocument16 pagesLUDWINGPacho DeazaPas encore d'évaluation
- Aspectos IndividualesDocument4 pagesAspectos IndividualesHolger GuamanPas encore d'évaluation
- T Are A 6 Nombre ApellidoDocument3 pagesT Are A 6 Nombre ApellidoANTONIO ROLDAN MENDOZAPas encore d'évaluation
- Redes de Neuronas Artificiales Isasi-Galvan PDFDocument240 pagesRedes de Neuronas Artificiales Isasi-Galvan PDFEmmanuel VulfersthawiskyPas encore d'évaluation
- Control de Posición en Coordenadas Articulares (Tarea 9) : Facultad de Ciencias de La ElectrónicaDocument6 pagesControl de Posición en Coordenadas Articulares (Tarea 9) : Facultad de Ciencias de La Electrónicamichel guerraPas encore d'évaluation
- El Modelo InterracionalDocument16 pagesEl Modelo Interracionalnadir_morales6289Pas encore d'évaluation
- Esquema Del Proceso de La ComunicaciónDocument11 pagesEsquema Del Proceso de La ComunicaciónMarcelo Benitez100% (2)
- Practica 5 Control 2Document14 pagesPractica 5 Control 2Jorge Arturo Medina GutierrezPas encore d'évaluation
- EjemploCompleto ER2RelacionalDocument6 pagesEjemploCompleto ER2Relacionalfranru.parkourPas encore d'évaluation
- Voz Robotica Con Tts y Vocoder para Hacer Un Robot Con Inteligencia Artificial CaseroDocument4 pagesVoz Robotica Con Tts y Vocoder para Hacer Un Robot Con Inteligencia Artificial CaseroArte Y MecatrónicaPas encore d'évaluation
- El Diseño CyberpunkDocument137 pagesEl Diseño CyberpunkBen Romero SPas encore d'évaluation
- Comunicación Efectiva ApuntesDocument5 pagesComunicación Efectiva ApuntesAlicia HorebPas encore d'évaluation
- Psicología oscura: Una guía esencial de persuasión, manipulación, engaño, control mental, negociación, conducta humana, PNL y guerra psicológicaD'EverandPsicología oscura: Una guía esencial de persuasión, manipulación, engaño, control mental, negociación, conducta humana, PNL y guerra psicológicaÉvaluation : 4.5 sur 5 étoiles4.5/5 (766)
- Yo Pude, ¡Tú Puedes!: Cómo tomar el control de tu bienestar emocional y convertirte en una persona imparable (edición revisada y expandida)D'EverandYo Pude, ¡Tú Puedes!: Cómo tomar el control de tu bienestar emocional y convertirte en una persona imparable (edición revisada y expandida)Évaluation : 5 sur 5 étoiles5/5 (9)
- Recupera tu mente, reconquista tu vidaD'EverandRecupera tu mente, reconquista tu vidaÉvaluation : 5 sur 5 étoiles5/5 (9)
- La violencia invisible: Identificar, entender y superar la violencia psicológica que sufrimos (y ejercemos) en nuestra vida cotidianaD'EverandLa violencia invisible: Identificar, entender y superar la violencia psicológica que sufrimos (y ejercemos) en nuestra vida cotidianaÉvaluation : 4 sur 5 étoiles4/5 (2)
- La madre emocionalmente ausente: Como reconocer y sanar los efectos invisibles del abandono emocional infantilD'EverandLa madre emocionalmente ausente: Como reconocer y sanar los efectos invisibles del abandono emocional infantilPas encore d'évaluation
- Resetea tu mente. Descubre de lo que eres capazD'EverandResetea tu mente. Descubre de lo que eres capazÉvaluation : 5 sur 5 étoiles5/5 (196)
- El poder del optimismo: Herramientas para vivir de forma más positivaD'EverandEl poder del optimismo: Herramientas para vivir de forma más positivaÉvaluation : 5 sur 5 étoiles5/5 (16)
- Las 6 necesidades de cada niño: Empoderar a padres e hijos a través de la ciencia de la conexiónD'EverandLas 6 necesidades de cada niño: Empoderar a padres e hijos a través de la ciencia de la conexiónÉvaluation : 4.5 sur 5 étoiles4.5/5 (6)
- Resumen de Pensar rápido pensar despacio de Daniel KahnemanD'EverandResumen de Pensar rápido pensar despacio de Daniel KahnemanÉvaluation : 4.5 sur 5 étoiles4.5/5 (64)
- Una mente en calma: Técnicas para manejar los pensamientos intrusivosD'EverandUna mente en calma: Técnicas para manejar los pensamientos intrusivosÉvaluation : 4.5 sur 5 étoiles4.5/5 (143)
- Contra la ansiedad: Una guía completa para manejar emociones difícilesD'EverandContra la ansiedad: Una guía completa para manejar emociones difícilesÉvaluation : 5 sur 5 étoiles5/5 (58)
- Cómo terminar lo que empiezas: El arte de perseverar, pasar a la acción, ejecutar los planes y tener disciplinaD'EverandCómo terminar lo que empiezas: El arte de perseverar, pasar a la acción, ejecutar los planes y tener disciplinaÉvaluation : 4.5 sur 5 étoiles4.5/5 (6)
- Influencia. La psicología de la persuasiónD'EverandInfluencia. La psicología de la persuasiónÉvaluation : 4.5 sur 5 étoiles4.5/5 (14)
- Yo, ego. Una guía para dejar de sufrir, conectar contigo mismo y alcanzar la paz mentalD'EverandYo, ego. Una guía para dejar de sufrir, conectar contigo mismo y alcanzar la paz mentalÉvaluation : 4.5 sur 5 étoiles4.5/5 (7)
- El Tesoro Escondido (Hidden Treasure): La vida interior de niños y adolescentes. Terapia infanto-juvenilD'EverandEl Tesoro Escondido (Hidden Treasure): La vida interior de niños y adolescentes. Terapia infanto-juvenilÉvaluation : 5 sur 5 étoiles5/5 (4)
- No desperdicies tus emociones: Cómo lo que sientes te acerca a Dios y le da gloriaD'EverandNo desperdicies tus emociones: Cómo lo que sientes te acerca a Dios y le da gloriaÉvaluation : 5 sur 5 étoiles5/5 (13)