Vous aimerez peut-être aussi
- Power System Security AnalysisDocument24 pagesPower System Security AnalysiscdkPas encore d'évaluation
- Load Sharing Regulation of A Grid-Connected Solar Photovoltaic PV System in Karbala CityDocument15 pagesLoad Sharing Regulation of A Grid-Connected Solar Photovoltaic PV System in Karbala CityChetan KotwalPas encore d'évaluation
- We Are Intechopen, The World'S Leading Publisher of Open Access Books Built by Scientists, For ScientistsDocument21 pagesWe Are Intechopen, The World'S Leading Publisher of Open Access Books Built by Scientists, For ScientistsChetan KotwalPas encore d'évaluation
- Lecture 02Document26 pagesLecture 02Chetan KotwalPas encore d'évaluation
- Design of The Pv-Upqc System For Long Voltage Interruption CompensationDocument17 pagesDesign of The Pv-Upqc System For Long Voltage Interruption CompensationChetan KotwalPas encore d'évaluation
- Energies 10 00523 PDFDocument22 pagesEnergies 10 00523 PDFChetan KotwalPas encore d'évaluation
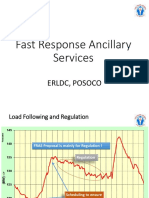
- Fast Response Ancillary Services: Erldc, PosocoDocument18 pagesFast Response Ancillary Services: Erldc, PosocoChetan KotwalPas encore d'évaluation
- I 01 Simulator Case EditorDocument76 pagesI 01 Simulator Case EditorMuhammad AbuzarPas encore d'évaluation
- Hybrid Systems I: Explaining Decisions of Intelligent TechniquesDocument21 pagesHybrid Systems I: Explaining Decisions of Intelligent TechniquesChetan KotwalPas encore d'évaluation
- Classifiers PDFDocument18 pagesClassifiers PDFChetan KotwalPas encore d'évaluation
- Power Market Seminar on Challenges & Opportunities in Power Generation, Transmission & DistributionDocument65 pagesPower Market Seminar on Challenges & Opportunities in Power Generation, Transmission & DistributionChetan KotwalPas encore d'évaluation
- AC Power Quality and StandardsDocument13 pagesAC Power Quality and StandardsChetan KotwalPas encore d'évaluation
- Research On Steady State Voltage Stability of Power System With Distributed Static Series CompensatorDocument5 pagesResearch On Steady State Voltage Stability of Power System With Distributed Static Series CompensatorChetan KotwalPas encore d'évaluation
- Tomorrow's Electric Power System:: Challenges & OpportunitiesDocument36 pagesTomorrow's Electric Power System:: Challenges & OpportunitiesChetan KotwalPas encore d'évaluation
- Yadav 2019Document27 pagesYadav 2019Chetan KotwalPas encore d'évaluation
- Flow: A For Stabilify: Continuation Power Tool Parametric Voltage Security AnalysisDocument6 pagesFlow: A For Stabilify: Continuation Power Tool Parametric Voltage Security AnalysisChetan KotwalPas encore d'évaluation
- Ashraf 2014Document6 pagesAshraf 2014Chetan KotwalPas encore d'évaluation
- SVC Applications: Increase in Steady-State Power-Transfer CapacityDocument21 pagesSVC Applications: Increase in Steady-State Power-Transfer CapacityChetan KotwalPas encore d'évaluation
- Application of REI Equivalent in Reactive Power Optimization Control in Regional Power GridDocument4 pagesApplication of REI Equivalent in Reactive Power Optimization Control in Regional Power GridChetan KotwalPas encore d'évaluation
- Generators and Loads Contribution Factors Based CoDocument5 pagesGenerators and Loads Contribution Factors Based CoChetan KotwalPas encore d'évaluation
- Nonlinear Optimization Method Reduces Transmission NetworksDocument7 pagesNonlinear Optimization Method Reduces Transmission NetworksChetan KotwalPas encore d'évaluation
- 11 Major Power Grid BlackoutsDocument32 pages11 Major Power Grid BlackoutsChetan KotwalPas encore d'évaluation
- Sub Synchronous Resonance: Facts ControllersDocument17 pagesSub Synchronous Resonance: Facts ControllersChetan KotwalPas encore d'évaluation
- ObjectivesDocument15 pagesObjectivesChetan KotwalPas encore d'évaluation
- 1.1 Proposal of Smart GridDocument6 pages1.1 Proposal of Smart GridChetan KotwalPas encore d'évaluation
- Optimizing With GaDocument62 pagesOptimizing With GaNatanael Acencio RijoPas encore d'évaluation
- Ieee 9 Bus Technical NoteDocument5 pagesIeee 9 Bus Technical Note08mpe026Pas encore d'évaluation
- Cahier Technique: Fuzzy LogicDocument32 pagesCahier Technique: Fuzzy LogicChetan KotwalPas encore d'évaluation
- Series Compensation of Distribution and Subtransmission LinesDocument148 pagesSeries Compensation of Distribution and Subtransmission LinesChetan KotwalPas encore d'évaluation
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5784)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (119)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Quickin: 3D/2D Modelling Suite For Integral Water SolutionsDocument110 pagesQuickin: 3D/2D Modelling Suite For Integral Water SolutionscocoPas encore d'évaluation
- Answer: 60% Answer: Geography 55%: Harmonic Mean-Is Good at Handling Large OutliersDocument2 pagesAnswer: 60% Answer: Geography 55%: Harmonic Mean-Is Good at Handling Large Outliersroshia maePas encore d'évaluation
- Transportation Installation R2000iC210FDocument25 pagesTransportation Installation R2000iC210FMeet PAtel100% (2)
- Sambungan Chapter 2.2Document57 pagesSambungan Chapter 2.2iffahPas encore d'évaluation
- Mapping Abap XML PDFDocument88 pagesMapping Abap XML PDFassane2mcsPas encore d'évaluation
- Experiment 1 - Friction Losses in PipesDocument34 pagesExperiment 1 - Friction Losses in PipesKhairil Ikram33% (3)
- 4PH0 1P Que 20160119 PDFDocument28 pages4PH0 1P Que 20160119 PDFschlemielzPas encore d'évaluation
- Geometri Ruang File 1Document4 pagesGeometri Ruang File 1Muhammad Isna SumaatmajaPas encore d'évaluation
- CE 308 Plain and Reinforced Concrete - Ii Determination of Size, Spacing and Cover in Reinforced Concrete Slab by Cover MeterDocument9 pagesCE 308 Plain and Reinforced Concrete - Ii Determination of Size, Spacing and Cover in Reinforced Concrete Slab by Cover MeterumairPas encore d'évaluation
- Criteria Cogni+Ve Ap+Tude Style Free Test: AssessmentdayDocument15 pagesCriteria Cogni+Ve Ap+Tude Style Free Test: AssessmentdayRahul SharmaPas encore d'évaluation
- Semt/Mec Manta, Ecuador: 10-1R Eloy Alfaro IntlDocument16 pagesSemt/Mec Manta, Ecuador: 10-1R Eloy Alfaro IntlDavid CordovillaPas encore d'évaluation
- Use Jinja2 To Create TemplatesDocument44 pagesUse Jinja2 To Create TemplatesmPas encore d'évaluation
- Reservoir Modelling & Simulation GuideDocument96 pagesReservoir Modelling & Simulation GuideyouungPas encore d'évaluation
- Class XI Chemistry Question BankDocument71 pagesClass XI Chemistry Question BankNirmalaPas encore d'évaluation
- AVR R448: SpecificationDocument2 pagesAVR R448: SpecificationAish MohammedPas encore d'évaluation
- Clinical Microscopy ReviewerDocument31 pagesClinical Microscopy ReviewerbokbokbokPas encore d'évaluation
- 12 Translations PDFDocument4 pages12 Translations PDFTeo Lee Hong0% (1)
- Artikel Materi Skripsi - Qurrotu Aini-2Document13 pagesArtikel Materi Skripsi - Qurrotu Aini-2Qurrotu AiniPas encore d'évaluation
- EECIM01 Course MaterialDocument90 pagesEECIM01 Course Materialsmahesh_1980Pas encore d'évaluation
- Quizlet-Philippine Electrical CodeDocument2 pagesQuizlet-Philippine Electrical Codena zafira0% (1)
- Lesson Statement Sheet.Document2 pagesLesson Statement Sheet.Anya AshuPas encore d'évaluation
- Irfp4768Pbf: Application V 250V R 14.5M 17.5M I 93ADocument9 pagesIrfp4768Pbf: Application V 250V R 14.5M 17.5M I 93AKrishna InamdarPas encore d'évaluation
- Kotlin Programs - StudentsDocument74 pagesKotlin Programs - Studentsgandem gowhithPas encore d'évaluation
- Topic 4 - Chemical Kinetics 4b - Half LifeDocument20 pagesTopic 4 - Chemical Kinetics 4b - Half LifeJoshua LaBordePas encore d'évaluation
- Cs8080 - Irt - Notes AllDocument281 pagesCs8080 - Irt - Notes Allmukeshmsd2Pas encore d'évaluation
- Openscape Business V2: How To Configure Sip Trunk For Netfone HungaryDocument14 pagesOpenscape Business V2: How To Configure Sip Trunk For Netfone HungaryBelahreche MohamedPas encore d'évaluation
- E8244 Ahu Catalogue 2014 PDFDocument174 pagesE8244 Ahu Catalogue 2014 PDFmurugesanPas encore d'évaluation
- Business Calculus NotesDocument38 pagesBusiness Calculus NotesTom KowalskiPas encore d'évaluation
- Hi 3110 - V Rev KDocument54 pagesHi 3110 - V Rev KÁlvaro Eduardo López LimaPas encore d'évaluation