Vous aimerez peut-être aussi
- Uninterruptible Power Supply Multiloop Control Employing Digital Predictive Voltage and Current RegulatorsDocument9 pagesUninterruptible Power Supply Multiloop Control Employing Digital Predictive Voltage and Current RegulatorsPhạm Văn TưởngPas encore d'évaluation
- Solid State On Load Tap Changer For Transformer Using ArduinoDocument59 pagesSolid State On Load Tap Changer For Transformer Using ArduinoAkhileswara RaoPas encore d'évaluation
- B.Tech VI Semester Regular Examinations 17EI10-Process Control Instrumentation Scheme of ValuationDocument13 pagesB.Tech VI Semester Regular Examinations 17EI10-Process Control Instrumentation Scheme of ValuationSunny BPas encore d'évaluation
- Full71c 700387Document10 pagesFull71c 700387Mohammad Ivan HariyantoPas encore d'évaluation
- Lab 6 Engineering Measurement and Lab SampleDocument11 pagesLab 6 Engineering Measurement and Lab Sampletk_atiqahPas encore d'évaluation
- Current Mode Controller Design For Single Phase Grid Connected Inverter Using Proportional Resonant Control StrategyDocument6 pagesCurrent Mode Controller Design For Single Phase Grid Connected Inverter Using Proportional Resonant Control StrategyijeteeditorPas encore d'évaluation
- PCT 100 (Level)Document10 pagesPCT 100 (Level)Danang Pradika PurnomoPas encore d'évaluation
- Tuning A PID Controller For A Digital Excitation Control SystemDocument8 pagesTuning A PID Controller For A Digital Excitation Control SystemSharat Chandra KeswarPas encore d'évaluation
- Auto Selection of Any Available Phase, in 3 Phase Supply SystemDocument9 pagesAuto Selection of Any Available Phase, in 3 Phase Supply Systemmosub fudolPas encore d'évaluation
- Auto Selection of Any Available Phase, in 3 Phase Supply System-Ijaerdv05i10703Document9 pagesAuto Selection of Any Available Phase, in 3 Phase Supply System-Ijaerdv05i10703Bøññïe Ådë Cöloñêl100% (1)
- Practical Guides to Testing and Commissioning of Mechanical, Electrical and Plumbing (Mep) InstallationsD'EverandPractical Guides to Testing and Commissioning of Mechanical, Electrical and Plumbing (Mep) InstallationsÉvaluation : 3.5 sur 5 étoiles3.5/5 (3)
- TminDocument17 pagesTminhanaPas encore d'évaluation
- Experiment 4 Process Control Systems - Pct-100 Flow Control ObjectiveDocument10 pagesExperiment 4 Process Control Systems - Pct-100 Flow Control ObjectiveIlham JatiPas encore d'évaluation
- Mechatronics Unit III and IV Question and AnswersDocument6 pagesMechatronics Unit III and IV Question and AnswersSaravanan MathiPas encore d'évaluation
- The Book of (PLC & SCADA) Dosing System by HMIDocument102 pagesThe Book of (PLC & SCADA) Dosing System by HMIAwidhi KresnawanPas encore d'évaluation
- 948-955 IJER - 2016 - 1201 Mona CDocument7 pages948-955 IJER - 2016 - 1201 Mona CInnovative Research PublicationsPas encore d'évaluation
- Modul 4 PCT-100 Flow ControlDocument10 pagesModul 4 PCT-100 Flow ControlBagas Ghosa HidajatPas encore d'évaluation
- Implementation of Fuzzy Technique Based On Labview For Control Gas System Using Usb 6009Document10 pagesImplementation of Fuzzy Technique Based On Labview For Control Gas System Using Usb 6009Damir MiletaPas encore d'évaluation
- Converter Station Water-Cooled Pump Vibration Monitoring and Condition Assessment System Based On LabVIEWDocument6 pagesConverter Station Water-Cooled Pump Vibration Monitoring and Condition Assessment System Based On LabVIEWInternational Journal of Research in Engineering and SciencePas encore d'évaluation
- PSCAD EMTDC, FuzzyControl, HVDC Transmission, VoltageDependentCurrentOrderLimit VDCOLDocument9 pagesPSCAD EMTDC, FuzzyControl, HVDC Transmission, VoltageDependentCurrentOrderLimit VDCOLKurniawan Indra LeksanaPas encore d'évaluation
- 32.performance Analysis - FullDocument10 pages32.performance Analysis - FullyeisongarcesPas encore d'évaluation
- PROCON Student ManualDocument48 pagesPROCON Student ManualPaul100% (1)
- E21valve Remote Control SystemDocument13 pagesE21valve Remote Control System백승훈Pas encore d'évaluation
- TLE7242G-TLE8242-2L+-Application-Note KP KI V2 0Document13 pagesTLE7242G-TLE8242-2L+-Application-Note KP KI V2 0Larbi_Lakrout_7056Pas encore d'évaluation
- Nov 2011 Atul1Document10 pagesNov 2011 Atul1Rajeev RawatPas encore d'évaluation
- College of Engineering Process Control Lab.: Basrah UniversityDocument11 pagesCollege of Engineering Process Control Lab.: Basrah UniversityhanaPas encore d'évaluation
- AIS AnswersDocument37 pagesAIS AnswersSanatan DharmaPas encore d'évaluation
- Power System Restoration WithDocument5 pagesPower System Restoration WithSandhya ShyamasundarPas encore d'évaluation
- Double Closed-Loop PI Controller Tuning For MotorDocument8 pagesDouble Closed-Loop PI Controller Tuning For MotorvrajakisoriDasiPas encore d'évaluation
- Analysis Ofh-Infinity Controllers in Fuel Cell Powered Uninterruptible Power Supply SystemDocument4 pagesAnalysis Ofh-Infinity Controllers in Fuel Cell Powered Uninterruptible Power Supply SystemMurali DharanPas encore d'évaluation
- InstrumentationDocument8 pagesInstrumentationtingpaduPas encore d'évaluation
- Elimination of Harmonics Using Active Power Filter Based On DQ Reference Frame TheoryDocument5 pagesElimination of Harmonics Using Active Power Filter Based On DQ Reference Frame TheoryseventhsensegroupPas encore d'évaluation
- Change Over Switch MainDocument36 pagesChange Over Switch MainPeter Dindah100% (2)
- Ece IV Control Systems (10es43) Notes1Document205 pagesEce IV Control Systems (10es43) Notes1Nithindev GuttikondaPas encore d'évaluation
- PVM1Document4 pagesPVM1silverfurPas encore d'évaluation
- DC Link Approach To Variable-Speed, Sensorless,: Induction Motor DriveDocument5 pagesDC Link Approach To Variable-Speed, Sensorless,: Induction Motor DrivesamirmansourPas encore d'évaluation
- Automatic Control Systems Optimization and SensitiDocument9 pagesAutomatic Control Systems Optimization and SensitiOmar Q AdaylehPas encore d'évaluation
- Design of An Automatic Voltage RegulatorDocument8 pagesDesign of An Automatic Voltage RegulatorkhaledPas encore d'évaluation
- Control System Design of The Pumping StationDocument6 pagesControl System Design of The Pumping StationblackbriaruyjvhvjPas encore d'évaluation
- REM HR8022 001 - A User ManualDocument31 pagesREM HR8022 001 - A User Manualwaqkhan0% (1)
- Design of CMOS Based Biosensor OTA 2018Document10 pagesDesign of CMOS Based Biosensor OTA 2018RajeePas encore d'évaluation
- AN3115Document24 pagesAN3115Heriberto Flores AmpiePas encore d'évaluation
- PID ControllersDocument9 pagesPID Controllerszs94qjqcx7Pas encore d'évaluation
- A New Control Strategy For Voltage-Type PWM Rectifiers To Realize Zero Steady-State Control Error in Input CurrentDocument7 pagesA New Control Strategy For Voltage-Type PWM Rectifiers To Realize Zero Steady-State Control Error in Input Currentmipanduro7224Pas encore d'évaluation
- FinalPaperDesign and Simulation of PID Controller For Power Electronics Converter Circuits170541Document6 pagesFinalPaperDesign and Simulation of PID Controller For Power Electronics Converter Circuits170541annaPas encore d'évaluation
- Autotronics and Vehicle Intelligence : Aeng6205Document25 pagesAutotronics and Vehicle Intelligence : Aeng6205Abubaker MuzayinPas encore d'évaluation
- CCPWMDocument9 pagesCCPWMEmmeth ArdientePas encore d'évaluation
- Practices ManualDocument18 pagesPractices ManualAdjie PranatamaPas encore d'évaluation
- Watt's Speed Governor ForDocument18 pagesWatt's Speed Governor ForMuhammad Tayyab YousafzaiPas encore d'évaluation
- 1911 5805 1 PBDocument4 pages1911 5805 1 PBtt cheneyPas encore d'évaluation
- 23D AdvanceDocument8 pages23D AdvancePATEL SWAPNEELPas encore d'évaluation
- Fault Current Contribution From Synchronous Machine and Inverter Based DGDocument8 pagesFault Current Contribution From Synchronous Machine and Inverter Based DGabs1989Pas encore d'évaluation
- Fuzzy Based Supervision of DC Link PI Control in A DSTATCOM 2008Document6 pagesFuzzy Based Supervision of DC Link PI Control in A DSTATCOM 2008Dhammunodu MlaPas encore d'évaluation
- PLC Simulation ReportDocument62 pagesPLC Simulation ReportAsraful Goni NirabPas encore d'évaluation
- Design of A PFC Rectifier With Fast Start Up Response and Low Input Current DistortionDocument5 pagesDesign of A PFC Rectifier With Fast Start Up Response and Low Input Current DistortionAndrei LeleaPas encore d'évaluation
- Control of DC Motor Using Different Control StrategiesD'EverandControl of DC Motor Using Different Control StrategiesPas encore d'évaluation
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorD'EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorPas encore d'évaluation
- Introduction to Power System ProtectionD'EverandIntroduction to Power System ProtectionPas encore d'évaluation
- Introduction to Power System ProtectionD'EverandIntroduction to Power System ProtectionÉvaluation : 5 sur 5 étoiles5/5 (1)
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlD'EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlÉvaluation : 5 sur 5 étoiles5/5 (1)
- PCV 02Document1 pagePCV 02SswahyudiPas encore d'évaluation
- Instruments Index RO Plant YTMDocument8 pagesInstruments Index RO Plant YTMSswahyudiPas encore d'évaluation
- Electric Valve Actuator (DZW)Document14 pagesElectric Valve Actuator (DZW)Sswahyudi100% (1)
- PCV 02 Control Valve Project 10-2304. PLTMG SEI GELAM Control Valve - Gas, Steam or Vapor FlowDocument1 pagePCV 02 Control Valve Project 10-2304. PLTMG SEI GELAM Control Valve - Gas, Steam or Vapor FlowSswahyudiPas encore d'évaluation
- BOLOK Thermodynamic Characteristic Curves of Condensing TurbineDocument19 pagesBOLOK Thermodynamic Characteristic Curves of Condensing TurbineSswahyudiPas encore d'évaluation
- Electric Valve Actuators (Type SND-QD)Document18 pagesElectric Valve Actuators (Type SND-QD)SswahyudiPas encore d'évaluation
- Rotork ElectricDocument90 pagesRotork ElectricSswahyudiPas encore d'évaluation
- CuprionDocument93 pagesCuprionSswahyudiPas encore d'évaluation
- Boiler Feed Pump (BFP)Document22 pagesBoiler Feed Pump (BFP)SswahyudiPas encore d'évaluation
- 2.PA, SA & ID FanDocument201 pages2.PA, SA & ID FanSswahyudiPas encore d'évaluation
- SNW Pump Instruction & Operating ManualDocument43 pagesSNW Pump Instruction & Operating ManualSswahyudiPas encore d'évaluation
- TECO Instruction & Operation ManualDocument48 pagesTECO Instruction & Operation ManualSswahyudiPas encore d'évaluation
- Pressure Temperature (POINTEK)Document232 pagesPressure Temperature (POINTEK)SswahyudiPas encore d'évaluation
- Manual Book TurbinDocument130 pagesManual Book TurbinSswahyudiPas encore d'évaluation
- Equipment New Reweble Energy PDFDocument76 pagesEquipment New Reweble Energy PDFsugeng wahyudiPas encore d'évaluation
- Basic Design and Engineering Package PDFDocument164 pagesBasic Design and Engineering Package PDFSswahyudi100% (2)
- Tnu TT 10 Pro DWG 003 AllDocument9 pagesTnu TT 10 Pro DWG 003 AllSswahyudiPas encore d'évaluation
- Penawaran MPS PDFDocument1 pagePenawaran MPS PDFSswahyudiPas encore d'évaluation
- Diesel HydroDocument27 pagesDiesel Hydrosugeng wahyudiPas encore d'évaluation
- Sample of Inspection and Test Plan (ITP) : Appendix ADocument5 pagesSample of Inspection and Test Plan (ITP) : Appendix AJuang Brian SitanggangPas encore d'évaluation
- 1610803r PDFDocument57 pages1610803r PDFSswahyudiPas encore d'évaluation
- PL O Tfqdu - Ot : L"Dcoej, Q ) S?: Po P./JDocument14 pagesPL O Tfqdu - Ot : L"Dcoej, Q ) S?: Po P./JSswahyudiPas encore d'évaluation
- ABB Thermal and Electronic Overload RelaysDocument40 pagesABB Thermal and Electronic Overload RelaysVicktor GranadosPas encore d'évaluation
- Catalog PDFDocument85 pagesCatalog PDFSswahyudiPas encore d'évaluation
- 3DS 2017 SWK Electrical DatasheetDocument6 pages3DS 2017 SWK Electrical DatasheetSswahyudiPas encore d'évaluation
- Digest SchaniderDocument56 pagesDigest SchaniderSaka AdityaPas encore d'évaluation
- 01 Safety Chain Solution Motor StarterDocument4 pages01 Safety Chain Solution Motor StarterSswahyudiPas encore d'évaluation
- A2 - Open, Pre Cabled Motor Starters - P - EN (Dgcat)Document22 pagesA2 - Open, Pre Cabled Motor Starters - P - EN (Dgcat)SswahyudiPas encore d'évaluation
- ABB Thermal and Electronic Overload RelaysDocument40 pagesABB Thermal and Electronic Overload RelaysVicktor GranadosPas encore d'évaluation
- 1 - CCIE Training Diploma V1Document28 pages1 - CCIE Training Diploma V1SswahyudiPas encore d'évaluation
- Service Manual PFR82GDocument18 pagesService Manual PFR82GliderfgvPas encore d'évaluation
- KXNSERIESDocument6 pagesKXNSERIESJorge Martin Bejarano GonzalezPas encore d'évaluation
- Computer Systems Servicing Learning Module K To 12Document136 pagesComputer Systems Servicing Learning Module K To 12Enzo IlabPas encore d'évaluation
- IC Interconnect AnalysisDocument316 pagesIC Interconnect AnalysisRavi Singh0% (1)
- Product Catalog Copeland Scroll ZW Compressor For Heat Pump Water Heating en SG 7200238Document60 pagesProduct Catalog Copeland Scroll ZW Compressor For Heat Pump Water Heating en SG 7200238ThinhPas encore d'évaluation
- Nokia Flexi Bts AlarmsDocument8 pagesNokia Flexi Bts AlarmsOscar Leon IriartePas encore d'évaluation
- 6FM75TD-X: Battery ConstructionDocument2 pages6FM75TD-X: Battery ConstructionCristian Felipe Rangel TrianaPas encore d'évaluation
- Asr 44 - Asr Self Hold Thermal CutoutDocument4 pagesAsr 44 - Asr Self Hold Thermal CutoutHotel WijayaPas encore d'évaluation
- DatasheetDocument2 pagesDatasheetRaul AlfaroPas encore d'évaluation
- 0-Guia ParticipanteDocument94 pages0-Guia ParticipanteGerman Bernal100% (1)
- Cat Transferswitchsircom enDocument4 pagesCat Transferswitchsircom enWira Nur IndrawanPas encore d'évaluation
- Syllabus - Control of Electric DrivesDocument2 pagesSyllabus - Control of Electric DrivesTejas PanchalPas encore d'évaluation
- Power ElectronicsDocument190 pagesPower ElectronicsBabul PratapPas encore d'évaluation
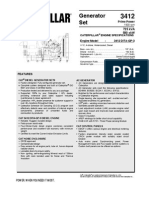
- Generator 3412 Set Prime Power Caterpillar EngineDocument7 pagesGenerator 3412 Set Prime Power Caterpillar Enginemoussa100% (3)
- Zenith E-Series ESP Gauge Technical Data SheetDocument2 pagesZenith E-Series ESP Gauge Technical Data SheetMustafa LaghaPas encore d'évaluation
- Servo Drive ManualDocument82 pagesServo Drive ManualjovclsPas encore d'évaluation
- EEE Staff Work Load I-SEM 19-20Document4 pagesEEE Staff Work Load I-SEM 19-20mlec hodPas encore d'évaluation
- Time Operated Electrical Appliances ControlDocument9 pagesTime Operated Electrical Appliances ControlSadaf GulshadPas encore d'évaluation
- Operation and Installation ManualDocument105 pagesOperation and Installation ManualNAVEDTRA12204Pas encore d'évaluation
- Diesel Plant Sizing and Performance Analysis of A Remote Wind-Diesel MicrogridDocument8 pagesDiesel Plant Sizing and Performance Analysis of A Remote Wind-Diesel MicrogridshadyPas encore d'évaluation
- IA - ASM - All Motors - c-UL - EN - 20200219Document11 pagesIA - ASM - All Motors - c-UL - EN - 20200219Fahru Rozy SunnyPas encore d'évaluation
- Srfet: General Description Product SummaryDocument7 pagesSrfet: General Description Product Summarymuhammad talqiPas encore d'évaluation
- Substrate Integrated Waveguide Microwave Encyclopedia Microwaves101Document5 pagesSubstrate Integrated Waveguide Microwave Encyclopedia Microwaves101Dr-Pritam Singh BakariyaPas encore d'évaluation
- PHYS102 GR03 (123221) SyllabusDocument3 pagesPHYS102 GR03 (123221) Syllabusnindidavid628Pas encore d'évaluation
- Marshall Bass Amp dbs7200Document5 pagesMarshall Bass Amp dbs7200Dean LombardPas encore d'évaluation
- Especificaciones Sismografo 1225Document3 pagesEspecificaciones Sismografo 1225Ivan VillarrealPas encore d'évaluation
- PEGA Manual V1.4 202006 ENDocument228 pagesPEGA Manual V1.4 202006 ENYohanes TriatmojoPas encore d'évaluation
- Bhel-5 Forces ModelDocument3 pagesBhel-5 Forces ModelAvanindra Nayak100% (1)
- General Price List - 15 Feb 2023: Supply & Servies of Solar ProductsDocument24 pagesGeneral Price List - 15 Feb 2023: Supply & Servies of Solar ProductsfareedsadatPas encore d'évaluation
- Datasheet IRFP 9240Document7 pagesDatasheet IRFP 9240AguilaSolitariaPas encore d'évaluation