Vous aimerez peut-être aussi
- Donati DrivesDocument20 pagesDonati DrivesAwni1989Pas encore d'évaluation
- Catalogo Cabeceiras DonatiDocument32 pagesCatalogo Cabeceiras DonatiIndustrial BrasilPas encore d'évaluation
- NP DLK Commer Eng Man21cg00Document12 pagesNP DLK Commer Eng Man21cg00bineeshbhasiPas encore d'évaluation
- Drive Solutions For The Cement Industry: DrivesystemsDocument12 pagesDrive Solutions For The Cement Industry: DrivesystemsPatran ValentinPas encore d'évaluation
- Reliability of High-Power Mechatronic Systems 1: Aerospace and Automotive Applications: Simulation, Modeling and OptimizationD'EverandReliability of High-Power Mechatronic Systems 1: Aerospace and Automotive Applications: Simulation, Modeling and OptimizationPas encore d'évaluation
- Manual VDF SiemensDocument332 pagesManual VDF SiemensMarco Rojas100% (1)
- Lafert ServoDocument102 pagesLafert ServoelfaguaPas encore d'évaluation
- Siemens 1LEDocument96 pagesSiemens 1LELuis Fernando BelloPas encore d'évaluation
- 2 Da65 10 eDocument287 pages2 Da65 10 eYahyaMoummouPas encore d'évaluation
- Motors ABC enDocument116 pagesMotors ABC enpavlone100% (1)
- Transnorm Motors: Low Voltage and High Voltage Design 200 KW Up To 1000 KWDocument37 pagesTransnorm Motors: Low Voltage and High Voltage Design 200 KW Up To 1000 KWShivani GuptaPas encore d'évaluation
- Sinamics G150Document64 pagesSinamics G150Alvaro MedinaPas encore d'évaluation
- 01.D11 1 Sinamics G120 2008Document177 pages01.D11 1 Sinamics G120 2008abecdarPas encore d'évaluation
- Aeg MotorsDocument62 pagesAeg Motorsndakota1987100% (2)
- Brushless LafertDocument82 pagesBrushless Lafertnavarro_eliezer9162Pas encore d'évaluation
- SEW Eurodrive Industrial Gear UnitsDocument15 pagesSEW Eurodrive Industrial Gear UnitsSteve IpPas encore d'évaluation
- Dizalica Imer 300 PDFDocument60 pagesDizalica Imer 300 PDFAnonymous CdUZMZJq73Pas encore d'évaluation
- Motor Siemenes 1laDocument113 pagesMotor Siemenes 1laenicolas2Pas encore d'évaluation
- CraneDocument7 pagesCraneEmran MiaPas encore d'évaluation
- M 380Document36 pagesM 380Ajie PrasetyaPas encore d'évaluation
- MRL W Line: Modular Machine Roomless Electric ElevatorDocument28 pagesMRL W Line: Modular Machine Roomless Electric ElevatorHassan TutungePas encore d'évaluation
- Aeg MotorsDocument62 pagesAeg Motorsmirakel000Pas encore d'évaluation
- Cat Motor USA WebDocument52 pagesCat Motor USA WebVamshi Kumar Reddy MPas encore d'évaluation
- Catalog Bulk Handling Motorized Pulleys ENDocument96 pagesCatalog Bulk Handling Motorized Pulleys ENBruno Alberto de SouzaPas encore d'évaluation
- Catalogue R I Con Lăn Rulmeca PDFDocument4 pagesCatalogue R I Con Lăn Rulmeca PDFRulmeca Việt NamPas encore d'évaluation
- X Rail - UkDocument24 pagesX Rail - UkLohit Kumar DasPas encore d'évaluation
- Sime Disc BrakesDocument200 pagesSime Disc Brakeskatlego01Pas encore d'évaluation
- Freio Do Motor de Traslação - BA - BFK458 - en - 2Document36 pagesFreio Do Motor de Traslação - BA - BFK458 - en - 2WilliamAOPas encore d'évaluation
- Pars Generator Aeg Electric MotorsDocument62 pagesPars Generator Aeg Electric MotorssanatikalaPas encore d'évaluation
- NordDocument120 pagesNordCARLOSWAR101Pas encore d'évaluation
- Bombardier Transportation MITRAC 1000Document8 pagesBombardier Transportation MITRAC 1000Rabbuni GangavarapuPas encore d'évaluation
- Crane KitsDocument18 pagesCrane KitsMiguel MachadoPas encore d'évaluation
- 130718Document176 pages130718Th NattapongPas encore d'évaluation
- Ge Vector 720eDocument2 pagesGe Vector 720ehectorPas encore d'évaluation
- 320D-336D Excavator IntroDocument48 pages320D-336D Excavator IntroNabil Anad93% (41)
- Crane Components: Technical CatalogueDocument28 pagesCrane Components: Technical CatalogueLuHa1Pas encore d'évaluation
- PODEM ANUPAM Brochure CraneComponentDocument28 pagesPODEM ANUPAM Brochure CraneComponentJnanamPas encore d'évaluation
- Nord EMDocument120 pagesNord EMflasnicugPas encore d'évaluation
- Catalogue BrookDocument28 pagesCatalogue BrookMaiPrachanartPas encore d'évaluation
- d81!1!2012 English Simotic-SiemensDocument501 pagesd81!1!2012 English Simotic-SiemensDavid SalinasPas encore d'évaluation
- Catalogue - Single - Three - Phase LAFERTDocument101 pagesCatalogue - Single - Three - Phase LAFERTAleex RodriguezPas encore d'évaluation
- Aeg 2011 - 4359861Document62 pagesAeg 2011 - 4359861ohyeungPas encore d'évaluation
- MAN YLD01C Chain Hoists eDocument44 pagesMAN YLD01C Chain Hoists eJohannesJacobsPas encore d'évaluation
- Freze Manual Cold-Milling-Machines enDocument244 pagesFreze Manual Cold-Milling-Machines endarthcorpus100% (10)
- ABB ACS355 CatalogDocument15 pagesABB ACS355 CatalogZul KarnaenPas encore d'évaluation
- Couplings SiemensDocument139 pagesCouplings SiemensTài liệu Công ty TNHH Nam TrungPas encore d'évaluation
- Rope HoistDocument12 pagesRope HoistArvindPas encore d'évaluation
- Installation Maintenance CalzoniDocument75 pagesInstallation Maintenance Calzonimobydick230% (1)
- Marine Alternators: Up To 2500 kVA 50Hz / 3000kVA 60HzDocument5 pagesMarine Alternators: Up To 2500 kVA 50Hz / 3000kVA 60HzxxxxxAMSPas encore d'évaluation
- Skid UnitDocument11 pagesSkid UnitAmar BenAmarPas encore d'évaluation
- SERV1852 - TXT1.Introducción 330DDocument47 pagesSERV1852 - TXT1.Introducción 330DDiego Alonso Huaraca BalerianoPas encore d'évaluation
- Dyadics SCN5 DatasheetDocument2 pagesDyadics SCN5 DatasheetElectromatePas encore d'évaluation
- Brooke CromptonDocument24 pagesBrooke Cromptond3xterPas encore d'évaluation
- Motores Weg Catalogo CompletoDocument72 pagesMotores Weg Catalogo CompletoMauricio KookcPas encore d'évaluation
- MarelliMotori A4C 180 L4Document48 pagesMarelliMotori A4C 180 L4superspif100% (1)
- The Modern Conveyor System and Its ConstructionDocument11 pagesThe Modern Conveyor System and Its ConstructionberliancantikberlianPas encore d'évaluation
- AccesoriosDocument2 pagesAccesoriosstalin_83Pas encore d'évaluation
- 2015 Below Ground ProductsDocument140 pages2015 Below Ground Productsstalin_83100% (1)
- Welding: 7.1.1 Principles For EconomyDocument5 pagesWelding: 7.1.1 Principles For Economystalin_83Pas encore d'évaluation
- Lecture 1Document85 pagesLecture 1phuong2311Pas encore d'évaluation
- Plano Maestro Conjunto Cercha Von 12 Von 13Document19 pagesPlano Maestro Conjunto Cercha Von 12 Von 13stalin_83Pas encore d'évaluation
- Certificado Andamio Coronet - Tipo CuplockDocument19 pagesCertificado Andamio Coronet - Tipo Cuplockstalin_83Pas encore d'évaluation
- Tower SketchDocument1 pageTower Sketchstalin_83Pas encore d'évaluation
- HSSColumnLoadTablesBrochure PDFDocument128 pagesHSSColumnLoadTablesBrochure PDFstalin_83Pas encore d'évaluation
- Rfrioa TuihtiuhtiuDocument82 pagesRfrioa TuihtiuhtiuAnonymous sfY8T3q0Pas encore d'évaluation
- Eta Cooler enDocument8 pagesEta Cooler enstalin_83Pas encore d'évaluation
- Pip Stf05530 Grating Details PDFDocument10 pagesPip Stf05530 Grating Details PDFstalin_83Pas encore d'évaluation
- Pad Eye Design Lifting Lug StandartDocument7 pagesPad Eye Design Lifting Lug Standartstalin_83Pas encore d'évaluation
- ASME V Art 30 Terms PDFDocument46 pagesASME V Art 30 Terms PDFstalin_83Pas encore d'évaluation
- 1587 GB PDFDocument3 pages1587 GB PDFstalin_83Pas encore d'évaluation
- Crane Example EurocodesDocument36 pagesCrane Example EurocodesKen SmithPas encore d'évaluation
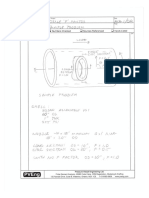
- Nozzle F SampleDocument5 pagesNozzle F Samplestalin_83Pas encore d'évaluation
- Optimum Design of Geodesic Steel Domes Under Code Provisions Using Metaheuristic TechniquesDocument16 pagesOptimum Design of Geodesic Steel Domes Under Code Provisions Using Metaheuristic TechniquesVinayak PotdarPas encore d'évaluation
- Getting Started With AutoCAD® Structural Detailing, Steel ModuleDocument49 pagesGetting Started With AutoCAD® Structural Detailing, Steel ModuleAllan David100% (1)
- Using The ASME VIII-1 Nozzle F Factor (UG-37)Document7 pagesUsing The ASME VIII-1 Nozzle F Factor (UG-37)stalin_83Pas encore d'évaluation
- Certificado AsmeDocument1 pageCertificado Asmestalin_83Pas encore d'évaluation
- HyperbaricaDocument29 pagesHyperbaricastalin_83Pas encore d'évaluation
- Safe Design and Operation ofDocument4 pagesSafe Design and Operation ofstalin_83Pas encore d'évaluation
- Lecture 1Document85 pagesLecture 1phuong2311Pas encore d'évaluation
- ReservaDocument1 pageReservastalin_83Pas encore d'évaluation
- Reserva Hollywood Inn South PDFDocument1 pageReserva Hollywood Inn South PDFstalin_83Pas encore d'évaluation
- Getting Started With AutoCAD® Structural Detailing, Steel ModuleDocument49 pagesGetting Started With AutoCAD® Structural Detailing, Steel ModuleAllan David100% (1)
- Rubiks Spanish PDFDocument12 pagesRubiks Spanish PDFAnawahIIPas encore d'évaluation
- (Report) Storage Tanks (Japan)Document179 pages(Report) Storage Tanks (Japan)RAJENDRA PRASADPas encore d'évaluation
- Advantages of Solid State Fermentation Over Submerged FermentationDocument32 pagesAdvantages of Solid State Fermentation Over Submerged Fermentationtelangsachin12Pas encore d'évaluation
- Interpretations of The IMO Gas Code: International Association of Classification SocietiesDocument53 pagesInterpretations of The IMO Gas Code: International Association of Classification SocietiesAlkaPas encore d'évaluation
- A Compendium of Blog Posts On Op Amp Design Topics: by Bruce TrumpDocument37 pagesA Compendium of Blog Posts On Op Amp Design Topics: by Bruce TrumpJustine ManningPas encore d'évaluation
- Huawei KPIs 10thsep2011Document15 pagesHuawei KPIs 10thsep2011Amr Mohamed Abd El-baryPas encore d'évaluation
- Ready To Use Therapeutic Food in RwandaDocument25 pagesReady To Use Therapeutic Food in RwandaKABERA RENEPas encore d'évaluation
- Module01 - AHPDocument18 pagesModule01 - AHPmia100% (1)
- Soil Mechanics: Triaxial Stress Measurement Test (Uu-Cu-Cd Tests)Document3 pagesSoil Mechanics: Triaxial Stress Measurement Test (Uu-Cu-Cd Tests)Opu DebnathPas encore d'évaluation
- Heat Treatment: Unit - IiDocument8 pagesHeat Treatment: Unit - IiParameswara RajaPas encore d'évaluation
- Pharmaceutical AnalysisDocument18 pagesPharmaceutical Analysisak gamingPas encore d'évaluation
- The Law of CosinesDocument12 pagesThe Law of CosinesLei Xennia YtingPas encore d'évaluation
- Physics Lab ReportDocument3 pagesPhysics Lab ReportReysa Gabrielle PilePas encore d'évaluation
- NSEJS Mini Test-1 OlympiadsDocument4 pagesNSEJS Mini Test-1 OlympiadsNarenthran RameshPas encore d'évaluation
- PT 849 Req D PatchesDocument34 pagesPT 849 Req D PatchesxwPas encore d'évaluation
- ET4117 Electrical Machines and Drives Lecture5Document31 pagesET4117 Electrical Machines and Drives Lecture5farhan beighPas encore d'évaluation
- SAE AMS QQ A 200-9-1997 Aluminum Alloy 6063 Bar Rod Shapes Tube and Wire ExtrudedDocument7 pagesSAE AMS QQ A 200-9-1997 Aluminum Alloy 6063 Bar Rod Shapes Tube and Wire ExtrudedsabrunoPas encore d'évaluation
- Matlab Manual1Document25 pagesMatlab Manual1Richard BrooksPas encore d'évaluation
- Lehmann Et Al 2013 PDFDocument13 pagesLehmann Et Al 2013 PDFJack HamiltonPas encore d'évaluation
- Digital Control Engineering 2nd Edition Fadali Solution Manual - Doc254405506Document23 pagesDigital Control Engineering 2nd Edition Fadali Solution Manual - Doc254405506chyntia50% (4)
- 13 38 Casing Preparation and Running ChecklistDocument3 pages13 38 Casing Preparation and Running ChecklistrajkumarfPas encore d'évaluation
- GOC & EAS CPP-II - PMDDocument14 pagesGOC & EAS CPP-II - PMDVansh sareenPas encore d'évaluation
- ASAM XIL Release-Presentation V2-2-0Document34 pagesASAM XIL Release-Presentation V2-2-0Arsalan KhanPas encore d'évaluation
- 500 MCQs Computer Awarness For IBPS RRB PO (By Studyniti)Document86 pages500 MCQs Computer Awarness For IBPS RRB PO (By Studyniti)Santosh SarswatPas encore d'évaluation
- HW 2 SolDocument5 pagesHW 2 SoltechutechuPas encore d'évaluation
- Choking vs. Clutch Performance: A Study of Sport Performance Under PressureDocument19 pagesChoking vs. Clutch Performance: A Study of Sport Performance Under Pressuremensrea0Pas encore d'évaluation
- Chapter 5Document23 pagesChapter 5Anil RaiPas encore d'évaluation
- Badminton Sport: Submitted By: Manav Lakdawala Institution:l.p Savani International SchoolDocument35 pagesBadminton Sport: Submitted By: Manav Lakdawala Institution:l.p Savani International SchoolManav LakdawalaPas encore d'évaluation
- DMD Effects in MMF and Delay CalculationDocument7 pagesDMD Effects in MMF and Delay CalculationMartin Escribano MadinaPas encore d'évaluation
- Chapter 02 - Components of CADCAMCAE SystemsDocument35 pagesChapter 02 - Components of CADCAMCAE SystemsKeVal PaTelPas encore d'évaluation
- 01 - Enhancing Power Density in SMPS With MasterganDocument44 pages01 - Enhancing Power Density in SMPS With MasterganNWorKPas encore d'évaluation
- Rules of MixtureDocument37 pagesRules of MixtureRahmaF.PuspitaPas encore d'évaluation