Vous aimerez peut-être aussi
- Design and Operation of Human Locomotion SystemsD'EverandDesign and Operation of Human Locomotion SystemsMarco CecarelliPas encore d'évaluation
- Design Analysis of A Remote Controlled P PDFDocument12 pagesDesign Analysis of A Remote Controlled P PDFVũ Mạnh CườngPas encore d'évaluation
- Practical, Made Easy Guide To Robotics & Automation [Revised Edition]D'EverandPractical, Made Easy Guide To Robotics & Automation [Revised Edition]Évaluation : 1 sur 5 étoiles1/5 (1)
- Design and Development of One Degree of Freedom Upper Limb ExoskeletonDocument6 pagesDesign and Development of One Degree of Freedom Upper Limb ExoskeletonWarnithaPas encore d'évaluation
- Design of Space Robotic Arm-Hand System and Operation ResearchDocument6 pagesDesign of Space Robotic Arm-Hand System and Operation ResearchSiraj AhmedPas encore d'évaluation
- Tethered Space Robot: Dynamics, Measurement, and ControlD'EverandTethered Space Robot: Dynamics, Measurement, and ControlPas encore d'évaluation
- EEE 1207 021 6 DOF Robotic Arm ManipulatorDocument7 pagesEEE 1207 021 6 DOF Robotic Arm ManipulatorUNsha bee komPas encore d'évaluation
- Radio Control for Model Ships, Boats and AircraftD'EverandRadio Control for Model Ships, Boats and AircraftÉvaluation : 5 sur 5 étoiles5/5 (1)
- EEE 1207 021 6 DOF Robotic Arm ManipulatorDocument7 pagesEEE 1207 021 6 DOF Robotic Arm ManipulatorCarlos Rodriguez RPas encore d'évaluation
- AR2398 Expochamacos 9aDocument30 pagesAR2398 Expochamacos 9aJose AguilarPas encore d'évaluation
- 17 06 Scitech BilleDocument12 pages17 06 Scitech BilleBenjamin JenettPas encore d'évaluation
- Fundamentals of Robotics: Brief HistoryDocument10 pagesFundamentals of Robotics: Brief HistorymikeemackPas encore d'évaluation
- Preprints202007 0217 v2Document21 pagesPreprints202007 0217 v2Thoan MạnhPas encore d'évaluation
- Development of In-Pipe Inspection RobotDocument10 pagesDevelopment of In-Pipe Inspection RobotEduardo AnayaPas encore d'évaluation
- Robots Step Outside: September 2005Document5 pagesRobots Step Outside: September 2005Ấm LeePas encore d'évaluation
- Ahmad Najib 135833 - Assigment (Part DR Wan) - Eem345 ManufactDocument9 pagesAhmad Najib 135833 - Assigment (Part DR Wan) - Eem345 ManufactNajib HairiPas encore d'évaluation
- MIT+猎豹+Dynamic Locomotion in the MIT Cheetah 3 Through Convex Model-Predictive ControlDocument8 pagesMIT+猎豹+Dynamic Locomotion in the MIT Cheetah 3 Through Convex Model-Predictive ControlZhipeng HOUPas encore d'évaluation
- 2005 AMAM BigDogDocument5 pages2005 AMAM BigDogDiriba AbdiPas encore d'évaluation
- MIT Cheetah 3: Design and Control of A Robust, Dynamic Quadruped RobotDocument9 pagesMIT Cheetah 3: Design and Control of A Robust, Dynamic Quadruped RobotJoseph ProstPas encore d'évaluation
- PT Engleza (Trebuie Tradus Tot)Document10 pagesPT Engleza (Trebuie Tradus Tot)Spring ReportPas encore d'évaluation
- Mechanical Design Optimization of A Piping Inspection Robot: Damien Chablat, Swaminath Venkateswaran, Frédéric BoyerDocument11 pagesMechanical Design Optimization of A Piping Inspection Robot: Damien Chablat, Swaminath Venkateswaran, Frédéric BoyerAnees Ur RehmanPas encore d'évaluation
- Control Algorithm For A Biped Robot Based On Servo-Motors Controlled by An Android ApplicationDocument7 pagesControl Algorithm For A Biped Robot Based On Servo-Motors Controlled by An Android ApplicationLuis MachadoPas encore d'évaluation
- Min - 184 (1-5) Final (Ok)Document5 pagesMin - 184 (1-5) Final (Ok)Nirmal KushwahaPas encore d'évaluation
- Kinematic Modeling of Quadruped RobotDocument6 pagesKinematic Modeling of Quadruped Robotnilesh_092Pas encore d'évaluation
- Auto-Balancing Two Wheeled Inverted Pendulum RobotDocument6 pagesAuto-Balancing Two Wheeled Inverted Pendulum Robotsaran gowdaPas encore d'évaluation
- Design of Six Legged Spider Robot and Evolving Walking AlgorithmsDocument6 pagesDesign of Six Legged Spider Robot and Evolving Walking AlgorithmsNgọc Minh LêPas encore d'évaluation
- Awaiting Anthopomorphis M (Robonauts) : K EywordsDocument14 pagesAwaiting Anthopomorphis M (Robonauts) : K Eywordschandru_8Pas encore d'évaluation
- Design and Implementation of A Robotic Arm Using Ros and Moveit!Document6 pagesDesign and Implementation of A Robotic Arm Using Ros and Moveit!NIKHIL SHINDEPas encore d'évaluation
- A Novel Design of A Quadruped Robot For Research PurposesDocument13 pagesA Novel Design of A Quadruped Robot For Research Purposessushreet2754Pas encore d'évaluation
- A 7 DOF Wearable Robotic Arm Using Pneumatic Actuators: April 2001Document7 pagesA 7 DOF Wearable Robotic Arm Using Pneumatic Actuators: April 2001TYTPas encore d'évaluation
- 0620Document7 pages0620Shahrzad GhasemiPas encore d'évaluation
- Robot For Transmission LineDocument6 pagesRobot For Transmission LinebhattparthivPas encore d'évaluation
- UNIT5 RoboticsDocument60 pagesUNIT5 RoboticsthamizmaniPas encore d'évaluation
- 3arm Robot Mini FinalDocument49 pages3arm Robot Mini FinalWebsoft Tech-HydPas encore d'évaluation
- An ITER Relevant Robot For Remote Handling: On The Road To Operation On Tore SupraDocument17 pagesAn ITER Relevant Robot For Remote Handling: On The Road To Operation On Tore SupramilanpkPas encore d'évaluation
- 2009 Pierrot TroDocument11 pages2009 Pierrot TroNikitaPas encore d'évaluation
- Kinematic, Dynamic Analysis and Control of 3 DOF Upper-Limb Robotic ExoskeletonDocument9 pagesKinematic, Dynamic Analysis and Control of 3 DOF Upper-Limb Robotic Exoskeletonbình nghuyễnPas encore d'évaluation
- Robotic ArmDocument22 pagesRobotic ArmEbru SayılganPas encore d'évaluation
- Khepera SimulataDocument24 pagesKhepera SimulataSimi MarPas encore d'évaluation
- Stair Climbing Robot ReportDocument15 pagesStair Climbing Robot Report22me01004Pas encore d'évaluation
- Design and Analysis of An Articulated Robot Arm For Various Industrial ApplicationsDocument12 pagesDesign and Analysis of An Articulated Robot Arm For Various Industrial Applicationsاقْرَأْ وَرَبُّكَ الْأَكْرَمُPas encore d'évaluation
- Mechanical Design and Optimal Control of HumanoidDocument12 pagesMechanical Design and Optimal Control of HumanoidDavi AssunçãoPas encore d'évaluation
- Wireless Mobile Robotic ArmDocument7 pagesWireless Mobile Robotic ArmUendel DiegoPas encore d'évaluation
- Objectives of RoboticsDocument2 pagesObjectives of RoboticsEr Alok Kumar SwainPas encore d'évaluation
- RobotDocument17 pagesRobotpdhananjaya007Pas encore d'évaluation
- Fully-Pipelined CORDIC-based FPGA Realization For A 3-DOF Hexapod-Leg Inverse Kinematics CalculationDocument6 pagesFully-Pipelined CORDIC-based FPGA Realization For A 3-DOF Hexapod-Leg Inverse Kinematics CalculationErick RodriguezPas encore d'évaluation
- Key Issues in Studying Parallel Manipulators 2011Document11 pagesKey Issues in Studying Parallel Manipulators 2011kpnskPas encore d'évaluation
- Zainaib JasssimDocument9 pagesZainaib JasssimAs AdPas encore d'évaluation
- Sample Template For RoboticsDocument10 pagesSample Template For RoboticsTaguno ChrisPas encore d'évaluation
- A Mobile Platform For Nursing Robot 1985Document14 pagesA Mobile Platform For Nursing Robot 1985mohsindalvi87Pas encore d'évaluation
- Research Article: Design of Information Acquisition and Control System For The Exoskeleton RobotDocument8 pagesResearch Article: Design of Information Acquisition and Control System For The Exoskeleton RobotHarshesh GokaniPas encore d'évaluation
- Dynamic Torque Control of A Hydraulic Quadruped RobotDocument6 pagesDynamic Torque Control of A Hydraulic Quadruped RobotPrathamesh SarafPas encore d'évaluation
- Balancing Control of A Two Wheeled Mobile Robot SystemDocument7 pagesBalancing Control of A Two Wheeled Mobile Robot SystemAbdellilah HattabPas encore d'évaluation
- Major Synopsis On Hydraulic ArmDocument7 pagesMajor Synopsis On Hydraulic ArmPrashant Balhara0% (2)
- Spider-Bots: A Low Cost Cooperative Robotics Platform: Damien Laird Jack Price Ioannis A. RaptisDocument6 pagesSpider-Bots: A Low Cost Cooperative Robotics Platform: Damien Laird Jack Price Ioannis A. RaptisLuis RuizPas encore d'évaluation
- Stability Controller Atlas Robot ExampleDocument6 pagesStability Controller Atlas Robot ExampleIvan PasterPas encore d'évaluation
- Differential-Drive In-Pipe Robot For Moving Inside Urban Gas PipelinesDocument17 pagesDifferential-Drive In-Pipe Robot For Moving Inside Urban Gas PipelinesAmino filePas encore d'évaluation
- A Novel Design of Delta Robot: AbstractDocument13 pagesA Novel Design of Delta Robot: AbstractGoodwill EnterprisesPas encore d'évaluation
- Torsten ReilDocument10 pagesTorsten ReilFajar HariadiPas encore d'évaluation
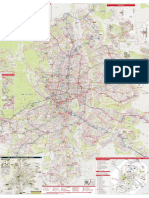
- Plano Bus MadridDocument1 pagePlano Bus MadridJose Torres NuñezPas encore d'évaluation
- Homer Training Cem We 20160121Document17 pagesHomer Training Cem We 20160121Jose Torres NuñezPas encore d'évaluation
- UCLM Estadistica ETSII DescriptiveDocument58 pagesUCLM Estadistica ETSII DescriptiveJose Torres NuñezPas encore d'évaluation
- Figure 10-1 FSK TransmitterDocument38 pagesFigure 10-1 FSK TransmitterJose Torres NuñezPas encore d'évaluation
- (Untitled) 2dsadfDocument2 pages(Untitled) 2dsadfJose Torres NuñezPas encore d'évaluation
- Viewpoints1 WB Key Unit9Document8 pagesViewpoints1 WB Key Unit9Jose Torres NuñezPas encore d'évaluation
- Elystar TSDI Service Manual-SHDocument24 pagesElystar TSDI Service Manual-SHScott Polotto100% (1)
- Carrier KHB Series Brochure - tcm478-51451Document2 pagesCarrier KHB Series Brochure - tcm478-51451Jerine BabuPas encore d'évaluation
- 172-8660 Fluid Level SwitchDocument1 page172-8660 Fluid Level SwitchDannyPas encore d'évaluation
- Naufal - Flare Technologies - PPTX (Tanpa Video)Document12 pagesNaufal - Flare Technologies - PPTX (Tanpa Video)Naufal AlhadyPas encore d'évaluation
- Problem Sheet 3 Heat, Work and The First Law of Thermodynamics PDFDocument4 pagesProblem Sheet 3 Heat, Work and The First Law of Thermodynamics PDFS DPas encore d'évaluation
- JNTUK-DAP-Course Structure and Syllabus-B.tech (Mechanical Engineering) - II YEAR.R10 StudentsDocument25 pagesJNTUK-DAP-Course Structure and Syllabus-B.tech (Mechanical Engineering) - II YEAR.R10 StudentsAnusha MylavarapuPas encore d'évaluation
- Unit 3. Heat and TemperatureDocument5 pagesUnit 3. Heat and TemperatureGine LópezPas encore d'évaluation
- STRESSES SHAFTINGS KEYS and SPLINES COUPLINGS Feb2023 Rev0Document15 pagesSTRESSES SHAFTINGS KEYS and SPLINES COUPLINGS Feb2023 Rev0loureniel de jesusPas encore d'évaluation
- Unit 3Document29 pagesUnit 3ashok Pradhan100% (1)
- TSSA-DLB-2020-Feb-09-2021-Biogas ProjectDocument9 pagesTSSA-DLB-2020-Feb-09-2021-Biogas ProjectNazrul IslamPas encore d'évaluation
- 603Document7 pages603jessa marie sayconPas encore d'évaluation
- Check List For Fire Pump - Nfpa 20 Systems General Submittal RequirementsDocument2 pagesCheck List For Fire Pump - Nfpa 20 Systems General Submittal Requirementssaus sambalPas encore d'évaluation
- PET 332 E Production Engineering & Surface FacilitiesDocument13 pagesPET 332 E Production Engineering & Surface Facilities000Pas encore d'évaluation
- Stallion MK II & IIIDocument31 pagesStallion MK II & IIIgokulmane117Pas encore d'évaluation
- Module 3 PDFDocument18 pagesModule 3 PDFVladimirPas encore d'évaluation
- CH2 - Heating System PDFDocument10 pagesCH2 - Heating System PDFAaron AngPas encore d'évaluation
- Fiitjee: Answers, Hints & SolutionsDocument10 pagesFiitjee: Answers, Hints & SolutionsZayanmalikPas encore d'évaluation
- IIT GUWAHATI Lec1Document25 pagesIIT GUWAHATI Lec1DCPas encore d'évaluation
- Automobile Workshop PracticeDocument2 pagesAutomobile Workshop PracticeSachi MensiPas encore d'évaluation
- Section 3 Hydraulic SystemDocument3 pagesSection 3 Hydraulic SystemRafał DworakPas encore d'évaluation
- Mapex AN0320SN PDFDocument1 pageMapex AN0320SN PDFDiegoTierradentroPas encore d'évaluation
- Manual MERCRUISER QSD 2.0L DIESEL ENGINE Service Repair Manual SN 88200000 and AboveDocument100 pagesManual MERCRUISER QSD 2.0L DIESEL ENGINE Service Repair Manual SN 88200000 and AboveWallace Ferlim100% (6)
- Hydraulics - Civil Engineering Questions and Answers Page 3Document6 pagesHydraulics - Civil Engineering Questions and Answers Page 3umairPas encore d'évaluation
- Orientation Syllabus Thermo 2Document16 pagesOrientation Syllabus Thermo 2Kenneth Rodriguez HerminadoPas encore d'évaluation
- Structures Module 3 Notes FullDocument273 pagesStructures Module 3 Notes Fulljohnmunjuga50Pas encore d'évaluation
- ME3252 Chapter 2 NotesDocument5 pagesME3252 Chapter 2 NotesAsffaq MuhdPas encore d'évaluation
- Skoda Fabia 1.4Document2 pagesSkoda Fabia 1.4wnsdPas encore d'évaluation
- SOM 2-2 (Students Note)Document15 pagesSOM 2-2 (Students Note)HasmitthaPas encore d'évaluation
- Compressed Air Filters: Sullair Distributor Conference 2001Document47 pagesCompressed Air Filters: Sullair Distributor Conference 2001MauroPas encore d'évaluation
- EMH332 Tutorial 4Document1 pageEMH332 Tutorial 4Chris ZiyuenPas encore d'évaluation
- ChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveD'EverandChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurvePas encore d'évaluation
- Cyber War: The Next Threat to National Security and What to Do About ItD'EverandCyber War: The Next Threat to National Security and What to Do About ItÉvaluation : 3.5 sur 5 étoiles3.5/5 (66)
- ChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindD'EverandChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindPas encore d'évaluation
- Algorithms to Live By: The Computer Science of Human DecisionsD'EverandAlgorithms to Live By: The Computer Science of Human DecisionsÉvaluation : 4.5 sur 5 étoiles4.5/5 (722)
- Defensive Cyber Mastery: Expert Strategies for Unbeatable Personal and Business SecurityD'EverandDefensive Cyber Mastery: Expert Strategies for Unbeatable Personal and Business SecurityÉvaluation : 5 sur 5 étoiles5/5 (1)
- Scary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldD'EverandScary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldÉvaluation : 4.5 sur 5 étoiles4.5/5 (55)
- Digital Gold: Bitcoin and the Inside Story of the Misfits and Millionaires Trying to Reinvent MoneyD'EverandDigital Gold: Bitcoin and the Inside Story of the Misfits and Millionaires Trying to Reinvent MoneyÉvaluation : 4 sur 5 étoiles4/5 (51)
- The Infinite Machine: How an Army of Crypto-Hackers Is Building the Next Internet with EthereumD'EverandThe Infinite Machine: How an Army of Crypto-Hackers Is Building the Next Internet with EthereumÉvaluation : 3 sur 5 étoiles3/5 (12)
- Chaos Monkeys: Obscene Fortune and Random Failure in Silicon ValleyD'EverandChaos Monkeys: Obscene Fortune and Random Failure in Silicon ValleyÉvaluation : 3.5 sur 5 étoiles3.5/5 (111)
- Reality+: Virtual Worlds and the Problems of PhilosophyD'EverandReality+: Virtual Worlds and the Problems of PhilosophyÉvaluation : 4 sur 5 étoiles4/5 (24)
- Generative AI: The Insights You Need from Harvard Business ReviewD'EverandGenerative AI: The Insights You Need from Harvard Business ReviewÉvaluation : 4.5 sur 5 étoiles4.5/5 (2)
- AI Superpowers: China, Silicon Valley, and the New World OrderD'EverandAI Superpowers: China, Silicon Valley, and the New World OrderÉvaluation : 4.5 sur 5 étoiles4.5/5 (398)
- CompTIA Security+ Get Certified Get Ahead: SY0-701 Study GuideD'EverandCompTIA Security+ Get Certified Get Ahead: SY0-701 Study GuideÉvaluation : 5 sur 5 étoiles5/5 (2)
- ChatGPT Millionaire 2024 - Bot-Driven Side Hustles, Prompt Engineering Shortcut Secrets, and Automated Income Streams that Print Money While You Sleep. The Ultimate Beginner’s Guide for AI BusinessD'EverandChatGPT Millionaire 2024 - Bot-Driven Side Hustles, Prompt Engineering Shortcut Secrets, and Automated Income Streams that Print Money While You Sleep. The Ultimate Beginner’s Guide for AI BusinessPas encore d'évaluation
- System Error: Where Big Tech Went Wrong and How We Can RebootD'EverandSystem Error: Where Big Tech Went Wrong and How We Can RebootPas encore d'évaluation
- The Things We Make: The Unknown History of Invention from Cathedrals to Soda CansD'EverandThe Things We Make: The Unknown History of Invention from Cathedrals to Soda CansPas encore d'évaluation
- Chip War: The Quest to Dominate the World's Most Critical TechnologyD'EverandChip War: The Quest to Dominate the World's Most Critical TechnologyÉvaluation : 4.5 sur 5 étoiles4.5/5 (227)
- The Intel Trinity: How Robert Noyce, Gordon Moore, and Andy Grove Built the World's Most Important CompanyD'EverandThe Intel Trinity: How Robert Noyce, Gordon Moore, and Andy Grove Built the World's Most Important CompanyPas encore d'évaluation
- The Future of Geography: How the Competition in Space Will Change Our WorldD'EverandThe Future of Geography: How the Competition in Space Will Change Our WorldÉvaluation : 4 sur 5 étoiles4/5 (5)
- Who's Afraid of AI?: Fear and Promise in the Age of Thinking MachinesD'EverandWho's Afraid of AI?: Fear and Promise in the Age of Thinking MachinesÉvaluation : 4.5 sur 5 étoiles4.5/5 (13)
- Mini Farming: Self-Sufficiency on 1/4 AcreD'EverandMini Farming: Self-Sufficiency on 1/4 AcreÉvaluation : 4 sur 5 étoiles4/5 (76)
- Demystifying Prompt Engineering: AI Prompts at Your Fingertips (A Step-By-Step Guide)D'EverandDemystifying Prompt Engineering: AI Prompts at Your Fingertips (A Step-By-Step Guide)Évaluation : 4 sur 5 étoiles4/5 (1)


![Practical, Made Easy Guide To Robotics & Automation [Revised Edition]](https://imgv2-2-f.scribdassets.com/img/word_document/253466853/149x198/4281882d40/1709916831?v=1)