Vous aimerez peut-être aussi
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Preparation of Turkey Red OilDocument16 pagesPreparation of Turkey Red OilHimanshu Jha73% (11)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- CO2 Depressurisation OLGADocument8 pagesCO2 Depressurisation OLGAMaheshPas encore d'évaluation
- Lightweight UavDocument149 pagesLightweight Uavvb corpPas encore d'évaluation
- Design Guide Handbook For EN 1996 Design of Masonry StructuresDocument46 pagesDesign Guide Handbook For EN 1996 Design of Masonry Structuresbusyspider100% (1)
- ASTM STP1385 Durability 2000 Accelerated and Outdoor Weathering TestingDocument186 pagesASTM STP1385 Durability 2000 Accelerated and Outdoor Weathering TestingKYAW SOEPas encore d'évaluation
- Design and Analysis of G+8 Commercial Building Using Staad ProDocument8 pagesDesign and Analysis of G+8 Commercial Building Using Staad ProVikaskumar ReddyPas encore d'évaluation
- How To Design R.C. Flat Slabs Using Finite Element AnalysisDocument16 pagesHow To Design R.C. Flat Slabs Using Finite Element Analysisocenkt100% (10)
- Introduction To XAFSDocument270 pagesIntroduction To XAFSEric William CochranPas encore d'évaluation
- Bnaic 2005Document7 pagesBnaic 2005ambrofosPas encore d'évaluation
- Lumley - Permutation TestsDocument27 pagesLumley - Permutation TestsambrofosPas encore d'évaluation
- Cai - Probability Matching Tolerance Intervals For Distributions in Exponential FamiliesDocument19 pagesCai - Probability Matching Tolerance Intervals For Distributions in Exponential FamiliesambrofosPas encore d'évaluation
- Non ParametricsDocument30 pagesNon ParametricsPradeepPas encore d'évaluation
- KUSTRA - Random Forest - Efficient P-Value Estimation in Massively Parallel Testing ProblemsDocument12 pagesKUSTRA - Random Forest - Efficient P-Value Estimation in Massively Parallel Testing ProblemsambrofosPas encore d'évaluation
- Gretton - A Kernel Test For Three-Variable Interactions With Random ProcessesDocument15 pagesGretton - A Kernel Test For Three-Variable Interactions With Random ProcessesambrofosPas encore d'évaluation
- Juuti - Stochastic Discriminant AnalysisDocument85 pagesJuuti - Stochastic Discriminant AnalysisambrofosPas encore d'évaluation
- Mathematical Foundations of The Generalization of T-SNE and SNE For Arbitrary DivergencesDocument16 pagesMathematical Foundations of The Generalization of T-SNE and SNE For Arbitrary DivergencesambrofosPas encore d'évaluation
- Rules of ThumbSTIMSON - Rules of ThumbDocument1 pageRules of ThumbSTIMSON - Rules of ThumbambrofosPas encore d'évaluation
- Lapse Rate - Wikipedia, The Free EncyclopediaDocument6 pagesLapse Rate - Wikipedia, The Free EncyclopediaambrofosPas encore d'évaluation
- LicenseDocument1 pageLicenseambrofosPas encore d'évaluation
- La Noyee Yann TiersenDocument13 pagesLa Noyee Yann TiersenambrofosPas encore d'évaluation
- Metalic AsDocument16 pagesMetalic AsKarencita Genesis LapibaPas encore d'évaluation
- Four Decades of Research On Thermal Contact, Gap, and Joint Resistance in MicroelectronicsDocument25 pagesFour Decades of Research On Thermal Contact, Gap, and Joint Resistance in MicroelectronicsDaniel MendesPas encore d'évaluation
- 1 s2.0 0304885395011137 MainDocument2 pages1 s2.0 0304885395011137 MainAyush VermaPas encore d'évaluation
- 37eb PDFDocument29 pages37eb PDFZikriaKMuhammadPas encore d'évaluation
- Modeling Mantle Convection CurrentsDocument3 pagesModeling Mantle Convection Currentsapi-217451187Pas encore d'évaluation
- MIT OCW Principles of Inorganic Chemistry II Lecture on Octahedral ML6 Sigma ComplexesDocument7 pagesMIT OCW Principles of Inorganic Chemistry II Lecture on Octahedral ML6 Sigma Complexessanskarid94Pas encore d'évaluation
- TFA 1 2 3 4 5 6 7 8 9 10 in Nozzles Sizes: OptionDocument1 pageTFA 1 2 3 4 5 6 7 8 9 10 in Nozzles Sizes: OptionrajkumarfPas encore d'évaluation
- Atomic Structure and Fundamental ParticlesDocument32 pagesAtomic Structure and Fundamental ParticleshumayunbashaPas encore d'évaluation
- 1 Electricity Test QuestionsDocument5 pages1 Electricity Test QuestionstinoPas encore d'évaluation
- 79 PDFDocument4 pages79 PDFHolayilPas encore d'évaluation
- Catalog Whatman 2018.compressedDocument214 pagesCatalog Whatman 2018.compressedRakha Milan BachtiarPas encore d'évaluation
- Design Steel Compression MembersDocument42 pagesDesign Steel Compression MembersFayyazAhmadPas encore d'évaluation
- Electrical Engineering BA (B), Analog Electronics, ET065G 6 Credits ET064G 7.5 CreditsDocument43 pagesElectrical Engineering BA (B), Analog Electronics, ET065G 6 Credits ET064G 7.5 Creditsdev-nullPas encore d'évaluation
- SOAL ElmesDocument16 pagesSOAL ElmesNurul HanifahPas encore d'évaluation
- Astm A82 1979Document6 pagesAstm A82 1979yoki_triwahyudiPas encore d'évaluation
- Ewald SphereDocument57 pagesEwald SphereMohammad Rameez0% (1)
- AAS 6300 Service ManualDocument76 pagesAAS 6300 Service Manualfuadye100% (1)
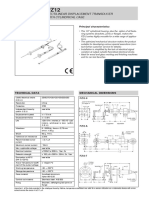
- Rectilinear Displacement Transducer With Cylindrical Case: Technical Data Mechanical DimensionsDocument2 pagesRectilinear Displacement Transducer With Cylindrical Case: Technical Data Mechanical Dimensionsl561926Pas encore d'évaluation
- The Synchronus Rotor Instability Phenomenon - Morton Effect PDFDocument9 pagesThe Synchronus Rotor Instability Phenomenon - Morton Effect PDFabdullah buttPas encore d'évaluation
- A Fractal Dimension Is A Ratio Providing A Statistical Index of Complexity Comparing How Detail in A PatternDocument1 pageA Fractal Dimension Is A Ratio Providing A Statistical Index of Complexity Comparing How Detail in A PatternBaribari BalPas encore d'évaluation
- Determination of The Diffraction Intensity at Slit and Double Slit SystemsDocument5 pagesDetermination of The Diffraction Intensity at Slit and Double Slit SystemsJose Galvan100% (1)
- Comparing Masses of Reactants and ProductsDocument4 pagesComparing Masses of Reactants and ProductsDaniel TriumbariPas encore d'évaluation