Vous aimerez peut-être aussi
- Euler's Method: X FTX XT XDocument8 pagesEuler's Method: X FTX XT Xparin advaniPas encore d'évaluation
- Ordinary Differential EquationsDocument20 pagesOrdinary Differential Equationssofianina05Pas encore d'évaluation
- Predictor Corrector MethodDocument5 pagesPredictor Corrector Methodlazarbaruch3033Pas encore d'évaluation
- Numerical Solution To Ordinary Differential EquationsDocument11 pagesNumerical Solution To Ordinary Differential EquationsLexzyrie Sybelle S. TolarbaPas encore d'évaluation
- 8 Differential EquationsDocument18 pages8 Differential Equationsqu001Pas encore d'évaluation
- Ordinary Differential EquationDocument13 pagesOrdinary Differential EquationMich LadycanPas encore d'évaluation
- Taylor ExpansionDocument8 pagesTaylor ExpansionJammy4411Pas encore d'évaluation
- Block2 Assignment PDFDocument8 pagesBlock2 Assignment PDFDenielPas encore d'évaluation
- Numerical Integration: Msa / L-6 Cse-3512 - Numerical Methods 27 January, 2005Document3 pagesNumerical Integration: Msa / L-6 Cse-3512 - Numerical Methods 27 January, 2005Al Asad Nur RiyadPas encore d'évaluation
- Initial Value ThoermDocument61 pagesInitial Value ThoermTushar DagaPas encore d'évaluation
- TaylorDocument5 pagesTaylorpazriePas encore d'évaluation
- PfinalDocument7 pagesPfinalLic Walter Andrés Ortiz VargasPas encore d'évaluation
- Section 2Document29 pagesSection 2Ivan WillePas encore d'évaluation
- Ordinary Differential EquationsDocument20 pagesOrdinary Differential EquationsTony HerrysPas encore d'évaluation
- RombergDocument3 pagesRombergmshchetkPas encore d'évaluation
- Crivelli The Stormer Verlet MethodDocument14 pagesCrivelli The Stormer Verlet Methodjjj_ddd_pierrePas encore d'évaluation
- Taylor's Theorem in 2 Variables: 0 00 2 N Approximation ErrorDocument2 pagesTaylor's Theorem in 2 Variables: 0 00 2 N Approximation ErrorIsrarul HaquePas encore d'évaluation
- Runga KuttaDocument6 pagesRunga KuttaNguyenNgocPas encore d'évaluation
- Numerical Differentiation First Derivative: Reminder: Definition of DifferentiationDocument7 pagesNumerical Differentiation First Derivative: Reminder: Definition of DifferentiationAchmad A'fhieccPas encore d'évaluation
- Differentials, ..., Taylor Series ExpansionsDocument5 pagesDifferentials, ..., Taylor Series Expansionsaysun.ragipiPas encore d'évaluation
- 10 17 16 Lagrange-MultipliersDocument3 pages10 17 16 Lagrange-MultipliersaoiwefoweiPas encore d'évaluation
- Persamaan GelombangDocument7 pagesPersamaan GelombangHikmah InsyirahPas encore d'évaluation
- Economics 204 Fall 2012 Problem Set 5 Suggested SolutionsDocument8 pagesEconomics 204 Fall 2012 Problem Set 5 Suggested SolutionsFunWithNumbers88Pas encore d'évaluation
- Anonymous - Taylor's Theorem PDFDocument6 pagesAnonymous - Taylor's Theorem PDFHarry JakePas encore d'évaluation
- Finite-Difference Methods: Numerical Method ProjectDocument13 pagesFinite-Difference Methods: Numerical Method ProjectSagar PrajapatiPas encore d'évaluation
- Cal211-CC05-GROUP 8Document11 pagesCal211-CC05-GROUP 8danh.tran214Pas encore d'évaluation
- Taylor Theorem of Several VariableDocument4 pagesTaylor Theorem of Several VariablereviatanPas encore d'évaluation
- Shrodinger EqDocument22 pagesShrodinger Eqawais33306Pas encore d'évaluation
- Differentiation: Is A Process by Which Rate of Change of A Curve Is DeterminedDocument10 pagesDifferentiation: Is A Process by Which Rate of Change of A Curve Is DeterminedTyh tytPas encore d'évaluation
- Lecture Three Solution of Systems of Nonlinear EquationsDocument4 pagesLecture Three Solution of Systems of Nonlinear Equationsmuqtada.fadhilPas encore d'évaluation
- Problem Set 7 Solutions PDFDocument33 pagesProblem Set 7 Solutions PDFfrancis_tsk1Pas encore d'évaluation
- Numerical Analysis With Application: Statistics and Informatics Second Stage 2021-2022Document26 pagesNumerical Analysis With Application: Statistics and Informatics Second Stage 2021-2022Rebar QaraxiPas encore d'évaluation
- Numerical Methods 5.1 Numerical IntegrationDocument5 pagesNumerical Methods 5.1 Numerical IntegrationMuhammad AfiqPas encore d'évaluation
- Compute The Derivative by Definition: The Four Step ProcedureDocument6 pagesCompute The Derivative by Definition: The Four Step Procedureksr131Pas encore d'évaluation
- Shooting Method 5Document7 pagesShooting Method 5مرتضى عباسPas encore d'évaluation
- Lecture 4C - Substitution MethodsDocument11 pagesLecture 4C - Substitution MethodsChristian SarmientoPas encore d'évaluation
- Maximum & Minimum Problems LagrangeDocument22 pagesMaximum & Minimum Problems LagrangeCarolina Torres Lozano ΨPas encore d'évaluation
- Detailed Solutions A-07 JUNE 2003: I X X F F IDocument32 pagesDetailed Solutions A-07 JUNE 2003: I X X F F IAdzLinkBalaoangPas encore d'évaluation
- Calc3exam1spr06soln PDFDocument3 pagesCalc3exam1spr06soln PDFvikas_ojha54706Pas encore d'évaluation
- Initial-Value Problems SPRING 2005 - Revised: y X y y X F X yDocument13 pagesInitial-Value Problems SPRING 2005 - Revised: y X y y X F X yVinay GuptaPas encore d'évaluation
- Homework 5: Solutions: (A) Find F and F When (X, Y) (0, 0)Document9 pagesHomework 5: Solutions: (A) Find F and F When (X, Y) (0, 0)Davidon JaniPas encore d'évaluation
- CQF January 2014 Maths Primer Exercises and SolutionsDocument16 pagesCQF January 2014 Maths Primer Exercises and SolutionsladykryaPas encore d'évaluation
- Calculation of Value of Pi Using Monte-Carlo MethodDocument54 pagesCalculation of Value of Pi Using Monte-Carlo MethodShihabudheenPas encore d'évaluation
- Lecture 6 Numerical MethodsDocument4 pagesLecture 6 Numerical MethodsRajSarkarPas encore d'évaluation
- Quadratic Mean Differentiability ExampleDocument5 pagesQuadratic Mean Differentiability ExamplemamurtazaPas encore d'évaluation
- DifferentiationDocument9 pagesDifferentiationsalviano81Pas encore d'évaluation
- 5 Calculus VariationDocument13 pages5 Calculus VariationTan Jia En FeliciaPas encore d'évaluation
- Module 4Document9 pagesModule 4Kimeu EstherPas encore d'évaluation
- Exercise Set 05Document5 pagesExercise Set 05puss_trPas encore d'évaluation
- An Example With Two Lagrange MultipliersDocument4 pagesAn Example With Two Lagrange MultiplierscarolinaPas encore d'évaluation
- Taylor Expansions in 2dDocument5 pagesTaylor Expansions in 2dpazriePas encore d'évaluation
- Vector Calculus (1016-410-01) : Plan For The Day - Tuesday 12/4 1 Functions of Several VariablesDocument8 pagesVector Calculus (1016-410-01) : Plan For The Day - Tuesday 12/4 1 Functions of Several VariablesseptemdecillionPas encore d'évaluation
- Comparison of RK MethodsDocument13 pagesComparison of RK MethodsAnänth VärmäPas encore d'évaluation
- Numerical Differentiation: Approximating Derivatives From DataDocument3 pagesNumerical Differentiation: Approximating Derivatives From DataAhmed EidPas encore d'évaluation
- SeveralDocument10 pagesSeveralShraboni SinhaPas encore d'évaluation
- 04 Lagrange MultiplierDocument38 pages04 Lagrange MultiplieryayPas encore d'évaluation
- Multivariable Calculus Practice Midterm 2 Solutions Prof. FedorchukDocument5 pagesMultivariable Calculus Practice Midterm 2 Solutions Prof. FedorchukraduPas encore d'évaluation
- MATH2019 Course Problems 2012s1Document15 pagesMATH2019 Course Problems 2012s1Seanam DMPas encore d'évaluation
- Introductory Differential Equations: with Boundary Value Problems, Student Solutions Manual (e-only)D'EverandIntroductory Differential Equations: with Boundary Value Problems, Student Solutions Manual (e-only)Pas encore d'évaluation
- Cipanas - Los CimaungDocument2 pagesCipanas - Los CimaungumarPas encore d'évaluation
- Data Hujan Harian: Nama Pos: 08. Rancaekek-Cikeruh No. - Tahun: 2014Document2 pagesData Hujan Harian: Nama Pos: 08. Rancaekek-Cikeruh No. - Tahun: 2014umarPas encore d'évaluation
- Cidadap - Gn. HaluDocument2 pagesCidadap - Gn. HaluumarPas encore d'évaluation
- Data Hujan Harian: Nama Pos: 16. Cinchona No. Tahun: 2014Document2 pagesData Hujan Harian: Nama Pos: 16. Cinchona No. Tahun: 2014umarPas encore d'évaluation
- Data Hujan Harian: Nama Pos: 03. PASEH No. 180 Tahun: 2014Document2 pagesData Hujan Harian: Nama Pos: 03. PASEH No. 180 Tahun: 2014umarPas encore d'évaluation
- Data Hujan Harian: Nama Pos: 06. Kertamanah-Margamukti No. P.185 B Tahun: 2007Document2 pagesData Hujan Harian: Nama Pos: 06. Kertamanah-Margamukti No. P.185 B Tahun: 2007umarPas encore d'évaluation
- Cipaku - PasehDocument4 pagesCipaku - PasehumarPas encore d'évaluation
- Mike Flood UsermanualDocument108 pagesMike Flood UsermanualumarPas encore d'évaluation
- MIKE FLOOD Urban Flood Modelling Step by StepDocument17 pagesMIKE FLOOD Urban Flood Modelling Step by StepumarPas encore d'évaluation
- Taxonomy and Conservation: A Case Study From Chamaedorea AlternansDocument9 pagesTaxonomy and Conservation: A Case Study From Chamaedorea AlternansumarPas encore d'évaluation
- Dwnload Full Conceptual Physics 12th Edition Hewitt Test Bank PDFDocument36 pagesDwnload Full Conceptual Physics 12th Edition Hewitt Test Bank PDFscreamsoaring.pm7hcv100% (13)
- The Students Ovid Selections From The Metamorphoses by Ovid, Margaret Worsham MusgroveDocument425 pagesThe Students Ovid Selections From The Metamorphoses by Ovid, Margaret Worsham MusgroveMiriaam AguirrePas encore d'évaluation
- Awakening The Journalism Skills of High School StudentsDocument3 pagesAwakening The Journalism Skills of High School StudentsMaricel BernalPas encore d'évaluation
- Fundamentals of Marketing Management: by Prabhat Ranjan Choudhury, Sr. Lecturer, B.J.B (A) College, BhubaneswarDocument53 pagesFundamentals of Marketing Management: by Prabhat Ranjan Choudhury, Sr. Lecturer, B.J.B (A) College, Bhubaneswarprabhatrc4235Pas encore d'évaluation
- 3658 - Implement Load BalancingDocument6 pages3658 - Implement Load BalancingDavid Hung NguyenPas encore d'évaluation
- Effective Communication Chapter11Document9 pagesEffective Communication Chapter11kamaljeet70Pas encore d'évaluation
- 9 Prospect EvaluationDocument40 pages9 Prospect EvaluationgeorgiadisgPas encore d'évaluation
- Masterlist of Private Elem. Schools S.Y. 2016 2017 Cavite ProvinceDocument17 pagesMasterlist of Private Elem. Schools S.Y. 2016 2017 Cavite ProvinceacinehhjPas encore d'évaluation
- Case Study Diverticulosis PaperDocument12 pagesCase Study Diverticulosis Paperapi-381128376100% (3)
- Prinsip TriageDocument24 pagesPrinsip TriagePratama AfandyPas encore d'évaluation
- RCPI V VerchezDocument2 pagesRCPI V VerchezCin100% (1)
- Taxation and LibertyDocument28 pagesTaxation and LibertyRitu Raj RamanPas encore d'évaluation
- Course Hand Out Comm. Skill BSC AgDocument2 pagesCourse Hand Out Comm. Skill BSC Agfarid khanPas encore d'évaluation
- Breast Cancer ChemotherapyDocument7 pagesBreast Cancer Chemotherapydini kusmaharaniPas encore d'évaluation
- Chapter 3 SIP MethodologyDocument43 pagesChapter 3 SIP MethodologyMáxyne NalúalPas encore d'évaluation
- Consolidated PCU Labor Law Review 1st Batch Atty Jeff SantosDocument36 pagesConsolidated PCU Labor Law Review 1st Batch Atty Jeff SantosJannah Mae de OcampoPas encore d'évaluation
- What Does The Scripture Say - ' - Studies in The Function of Scripture in Early Judaism and Christianity, Volume 1 - The Synoptic GospelsDocument149 pagesWhat Does The Scripture Say - ' - Studies in The Function of Scripture in Early Judaism and Christianity, Volume 1 - The Synoptic GospelsCometa Halley100% (1)
- Read Chapter 4 Minicase: Fondren Publishing, Inc. From The Sales Force Management Textbook by Mark W. Johnston & Greg W. MarshallDocument1 pageRead Chapter 4 Minicase: Fondren Publishing, Inc. From The Sales Force Management Textbook by Mark W. Johnston & Greg W. MarshallKJRPas encore d'évaluation
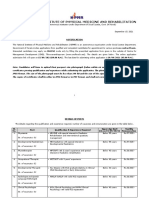
- NIPMR Notification v3Document3 pagesNIPMR Notification v3maneeshaPas encore d'évaluation
- 10 Chapter 3Document29 pages10 Chapter 3felefel100% (1)
- Girl: Dad, I Need A Few Supplies For School, and I Was Wondering If - . .Document3 pagesGirl: Dad, I Need A Few Supplies For School, and I Was Wondering If - . .AKSHATPas encore d'évaluation
- Thursday 08 October 2020: MathematicsDocument32 pagesThursday 08 October 2020: MathematicsAmjad AshaPas encore d'évaluation
- Software Development Life CycleDocument70 pagesSoftware Development Life CycleChaitanya MalikPas encore d'évaluation
- Winifred Breines The Trouble Between Us An Uneasy History of White and Black Women in The Feminist MovementDocument279 pagesWinifred Breines The Trouble Between Us An Uneasy History of White and Black Women in The Feminist MovementOlgaPas encore d'évaluation
- Bibliography of Loyalist Source MaterialDocument205 pagesBibliography of Loyalist Source MaterialNancyPas encore d'évaluation
- PDF Certificacion 3dsmaxDocument2 pagesPDF Certificacion 3dsmaxAriel Carrasco AlmanzaPas encore d'évaluation
- Bahasa Inggris XIIDocument1 pageBahasa Inggris XIIclaudiaomega.pPas encore d'évaluation
- Zone Raiders (Sci Fi 28mm)Document49 pagesZone Raiders (Sci Fi 28mm)Burrps Burrpington100% (3)
- Chem31.1 Experiment 2Document28 pagesChem31.1 Experiment 2Mia FernandezPas encore d'évaluation
- Financial Vs Health and Safety Vs Reputation Vs Opportunity CostsDocument11 pagesFinancial Vs Health and Safety Vs Reputation Vs Opportunity Costschanlego123Pas encore d'évaluation