Vous aimerez peut-être aussi
- Improving Geometrical Structure of Data Using Geometric Decision TreeDocument6 pagesImproving Geometrical Structure of Data Using Geometric Decision TreeInternational Journal of Application or Innovation in Engineering & ManagementPas encore d'évaluation
- Ôn-thi-KTDLDocument18 pagesÔn-thi-KTDL20521292Pas encore d'évaluation
- Machine Learning with Clustering: A Visual Guide for Beginners with Examples in PythonD'EverandMachine Learning with Clustering: A Visual Guide for Beginners with Examples in PythonPas encore d'évaluation
- Benchmarking Functions For Genetic AlgorithmsDocument7 pagesBenchmarking Functions For Genetic AlgorithmskalanathPas encore d'évaluation
- Adaptive Boosting Assisted Multiclass ClassificationDocument5 pagesAdaptive Boosting Assisted Multiclass ClassificationInternational Journal of Application or Innovation in Engineering & ManagementPas encore d'évaluation
- Multiple Clustering Views For Data AnalysisDocument4 pagesMultiple Clustering Views For Data AnalysisInternational Journal of Application or Innovation in Engineering & ManagementPas encore d'évaluation
- DA Assignment 2Document10 pagesDA Assignment 2Hîмanî JayasPas encore d'évaluation
- 5 Review PaperDocument7 pages5 Review PaperGorishsharmaPas encore d'évaluation
- Variable KD-Tree Algorithms for Efficient Spatial Pattern SearchDocument8 pagesVariable KD-Tree Algorithms for Efficient Spatial Pattern SearchFred DoanPas encore d'évaluation
- Unit-Iv DWDMDocument28 pagesUnit-Iv DWDMvarsha.j2177Pas encore d'évaluation
- Machine Learning 6Document28 pagesMachine Learning 6barkha saxenaPas encore d'évaluation
- A Comparative Study of Pruned Decision Trees and Fuzzy Decision TreesDocument5 pagesA Comparative Study of Pruned Decision Trees and Fuzzy Decision TreesAjay KumarPas encore d'évaluation
- Unit5Document5 pagesUnit5hollowpurple156Pas encore d'évaluation
- Machine Learning in EcologyDocument15 pagesMachine Learning in EcologyBranimir K. HackenbergerPas encore d'évaluation
- Extremely Randomized TreesDocument40 pagesExtremely Randomized TreesRico Bayu WiranataPas encore d'évaluation
- MC LearningDocument4 pagesMC LearningswapnilPas encore d'évaluation
- 125050decision Tree TrimmingDocument3 pages125050decision Tree Trimminggeleynux37Pas encore d'évaluation
- Ult SCH 94 BenchmarkDocument14 pagesUlt SCH 94 BenchmarkarshinPas encore d'évaluation
- Clustering With Decision Trees: Divisive and Agglomerative ApproachDocument6 pagesClustering With Decision Trees: Divisive and Agglomerative ApproachNimra KarimPas encore d'évaluation
- Hierarchical Clustering PDFDocument5 pagesHierarchical Clustering PDFLikitha ReddyPas encore d'évaluation
- K Means ClusteringDocument6 pagesK Means ClusteringAlina Corina BalaPas encore d'évaluation
- Assi 1Document27 pagesAssi 1MennaPas encore d'évaluation
- A Distribution-Aware Training Scheme For Learned IndexesDocument15 pagesA Distribution-Aware Training Scheme For Learned IndexesaaarashPas encore d'évaluation
- Graph Autoencoder-Based Unsupervised Feature Selection With Broad and Local Data Structure PreservationDocument28 pagesGraph Autoencoder-Based Unsupervised Feature Selection With Broad and Local Data Structure PreservationriadelectroPas encore d'évaluation
- Ijdkp 030205Document18 pagesIjdkp 030205Lewis TorresPas encore d'évaluation
- Abhisheksur 121Document8 pagesAbhisheksur 121Abhishek surPas encore d'évaluation
- CLUSTERING TITLEDocument12 pagesCLUSTERING TITLEkalpanaPas encore d'évaluation
- Decision Tree LearningDocument11 pagesDecision Tree Learningbenjamin212Pas encore d'évaluation
- Random ForestDocument32 pagesRandom ForestHJ ConsultantsPas encore d'évaluation
- Interpretable Clustering Via Optimal Trees: Prof. Dimitris BertsimasDocument8 pagesInterpretable Clustering Via Optimal Trees: Prof. Dimitris Bertsimasaegr82Pas encore d'évaluation
- Decision TreesDocument14 pagesDecision TreesJustin Russo Harry50% (2)
- AlgorithmsDocument7 pagesAlgorithmschavalla1807Pas encore d'évaluation
- ML Model Paper 1 Solution-1Document10 pagesML Model Paper 1 Solution-1VIKAS KUMARPas encore d'évaluation
- Lecture Note 5Document7 pagesLecture Note 5vivek guptaPas encore d'évaluation
- Clustering Exercise 4-15-15Document2 pagesClustering Exercise 4-15-15nomore891Pas encore d'évaluation
- Multi-Layer PerceptronsDocument8 pagesMulti-Layer PerceptronswarrengauciPas encore d'évaluation
- Ensemble LearningDocument21 pagesEnsemble LearningdfnngfffPas encore d'évaluation
- +A Distribution-Aware Training Scheme For Learned IndexesDocument15 pages+A Distribution-Aware Training Scheme For Learned IndexesaaarashPas encore d'évaluation
- Data Mining Lecture Review on Knowledge DiscoveryDocument20 pagesData Mining Lecture Review on Knowledge DiscoverymofoelPas encore d'évaluation
- AIML Final Cpy WordDocument15 pagesAIML Final Cpy WordSachin ChavanPas encore d'évaluation
- Random ForestDocument11 pagesRandom Forestjoseph676Pas encore d'évaluation
- Complete Search For Feature Selection in Decision TreesDocument34 pagesComplete Search For Feature Selection in Decision TreesJennyPas encore d'évaluation
- Outlines: Statements of Problems Objectives Bagging Random Forest Boosting AdaboostDocument14 pagesOutlines: Statements of Problems Objectives Bagging Random Forest Boosting Adaboostendale100% (1)
- Hierarchical Cluster AnalysisDocument10 pagesHierarchical Cluster Analysissan343Pas encore d'évaluation
- Data ScienceDocument5 pagesData ScienceKritikaPas encore d'évaluation
- AI Ass 2Document32 pagesAI Ass 2kollide beatsPas encore d'évaluation
- 1-Mapping Problems To Machine Learning TasksDocument19 pages1-Mapping Problems To Machine Learning TasksHimanshu NimjePas encore d'évaluation
- Ensemble Classifiers Combination Rules ComparisonDocument8 pagesEnsemble Classifiers Combination Rules ComparisonHitesh KashyapPas encore d'évaluation
- Machine Learning Techniques for Classifying Imbalanced Big DataDocument5 pagesMachine Learning Techniques for Classifying Imbalanced Big DataTakshakDesaiPas encore d'évaluation
- Phylogenetic Tree Constructions Methods and Programmes - L 11 - 12Document27 pagesPhylogenetic Tree Constructions Methods and Programmes - L 11 - 12kanz ul emaanPas encore d'évaluation
- Project ReportDocument7 pagesProject ReportM Shahid KhanPas encore d'évaluation
- Bagging and Random Forest Presentation1Document23 pagesBagging and Random Forest Presentation1endale100% (2)
- Ijtra 140765Document5 pagesIjtra 140765Akshay Kumar PandeyPas encore d'évaluation
- DWBI4Document10 pagesDWBI4Dhanraj DeorePas encore d'évaluation
- A) What Is Motivation Behind Ensemble Methods? Give Your Answer in Probabilistic TermsDocument6 pagesA) What Is Motivation Behind Ensemble Methods? Give Your Answer in Probabilistic TermsHassan Saddiqui100% (1)
- M.L. 3,5,6 Unit 3Document6 pagesM.L. 3,5,6 Unit 3atharv morePas encore d'évaluation
- Unit Iir20Document22 pagesUnit Iir20Yadavilli VinayPas encore d'évaluation
- Classification and Regression Trees As Alternatives To RegressionDocument2 pagesClassification and Regression Trees As Alternatives To RegressionSofía Riveros MalebránPas encore d'évaluation
- Abbasi, Mokhtarian - 1999 - Robustness of Shape Similarity Retrieval Under Affine TransformationDocument10 pagesAbbasi, Mokhtarian - 1999 - Robustness of Shape Similarity Retrieval Under Affine TransformationRicardus Anggi PramunendarPas encore d'évaluation
- AXIOO - Tambah Office 365 Hanya RP 500.000: (Harga Normal RP 3.799.000 Harga Special Diskon)Document12 pagesAXIOO - Tambah Office 365 Hanya RP 500.000: (Harga Normal RP 3.799.000 Harga Special Diskon)Muhammad Ilham Nurhantono088Pas encore d'évaluation
- 1973 - Haralick, Shanmugan, Dinstein - Textural Features For Image Classification PDFDocument12 pages1973 - Haralick, Shanmugan, Dinstein - Textural Features For Image Classification PDFRicardus Anggi PramunendarPas encore d'évaluation
- Fish Identification System: J.connan@ru - Ac.zaDocument6 pagesFish Identification System: J.connan@ru - Ac.zanickelchowPas encore d'évaluation
- AXIOO - Tambah Office 365 Hanya RP 500.000: (Harga Normal RP 3.799.000 Harga Special Diskon)Document12 pagesAXIOO - Tambah Office 365 Hanya RP 500.000: (Harga Normal RP 3.799.000 Harga Special Diskon)Muhammad Ilham Nurhantono088Pas encore d'évaluation
- Contoh Research ProposalDocument4 pagesContoh Research ProposalAngga RistaPas encore d'évaluation
- Auto Level Color Correction For Underwater Image Matching OptimizationDocument6 pagesAuto Level Color Correction For Underwater Image Matching OptimizationRicardus Anggi PramunendarPas encore d'évaluation
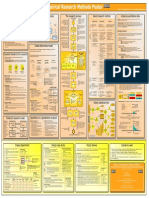
- Emperical Research Methods PosterDocument1 pageEmperical Research Methods PosterДмитрий ТокаренкоPas encore d'évaluation
- Estimation of The Joint Roughness Coefficient (JRC) of Rock Joints by Vector Similarity MeasuresDocument15 pagesEstimation of The Joint Roughness Coefficient (JRC) of Rock Joints by Vector Similarity MeasuresMia AmaliaPas encore d'évaluation
- Pattern Recognition: An Overview: Prof. Richard ZanibbiDocument29 pagesPattern Recognition: An Overview: Prof. Richard Zanibbiএ.এস. সাকিবPas encore d'évaluation
- Scholkopf B Smola AJ Learning With Kernels Support Vector Machines Regularization Optimization and Beyond PDFDocument646 pagesScholkopf B Smola AJ Learning With Kernels Support Vector Machines Regularization Optimization and Beyond PDFAfortunatov100% (2)
- Pattern Recognition 2nd Ed. (2009)Document113 pagesPattern Recognition 2nd Ed. (2009)jay89Pas encore d'évaluation
- Imbalanced Deep Learning by Minority Class Incremental RectificationDocument16 pagesImbalanced Deep Learning by Minority Class Incremental RectificationMaría Gerón GarcíaPas encore d'évaluation
- CPE412 Pattern Recognition (Week 1)Document19 pagesCPE412 Pattern Recognition (Week 1)Basil AlbattahPas encore d'évaluation
- Data Mining Tasks and ArchitectureDocument15 pagesData Mining Tasks and ArchitectureAkshay MathurPas encore d'évaluation
- Gujarat Technological UniversityDocument2 pagesGujarat Technological Universityfeyayel988Pas encore d'évaluation
- Pattern Recognition of Downhole Dynamometer Cards Using ANNsDocument4 pagesPattern Recognition of Downhole Dynamometer Cards Using ANNsCedric Kimloaz100% (1)
- D2L2 Caetano Classification Techniques PDFDocument73 pagesD2L2 Caetano Classification Techniques PDFYanquiel Mansfarroll GonzalezPas encore d'évaluation
- DD2437 Lecture04 PH 18htDocument33 pagesDD2437 Lecture04 PH 18htllPas encore d'évaluation
- PHD Thesis Roffo 2016 171 PDFDocument245 pagesPHD Thesis Roffo 2016 171 PDFArmin OkićPas encore d'évaluation
- Test Chapter 15Document15 pagesTest Chapter 15Rildo Reis TanPas encore d'évaluation
- Adventures in Data Analysis: A Systematic Review of Deep Learning Techniques For Pattern Recognition in Cyber Physical Social SystemsDocument65 pagesAdventures in Data Analysis: A Systematic Review of Deep Learning Techniques For Pattern Recognition in Cyber Physical Social SystemsAli Asghar Pourhaji KazemPas encore d'évaluation
- SAP Is Industry Solution Oil TablesDocument20 pagesSAP Is Industry Solution Oil TablesOrnruthai Nawachatkosit67% (3)
- Neural Networks and Artificial Intelligence For Biomedical Engineering Ieee Press Series On Biomedical Engineering PDFDocument314 pagesNeural Networks and Artificial Intelligence For Biomedical Engineering Ieee Press Series On Biomedical Engineering PDFAsina MilasPas encore d'évaluation
- Handwritten Character Recognition Using Neural NetworkDocument6 pagesHandwritten Character Recognition Using Neural NetworkSorin MoldoPas encore d'évaluation
- 01pattern RecognitionDocument14 pages01pattern RecognitionXg WuPas encore d'évaluation
- Rogress in Pattern Recognition PDFDocument27 pagesRogress in Pattern Recognition PDFJeremy ConnerPas encore d'évaluation
- Intelligent ControllersDocument33 pagesIntelligent ControllersSn ProfPas encore d'évaluation
- 사본 - CLNA17669ENC - 001 - p64 - p94 PDFDocument372 pages사본 - CLNA17669ENC - 001 - p64 - p94 PDFhyoung65Pas encore d'évaluation
- Data Clustering SeminarDocument34 pagesData Clustering SeminarPrateekChadhaPas encore d'évaluation
- Introduction To Machine Learning, in New Advances in Machine LearningDocument10 pagesIntroduction To Machine Learning, in New Advances in Machine LearningEdwinPas encore d'évaluation
- Expert System TTTDocument2 pagesExpert System TTTTolosa TafesePas encore d'évaluation
- Srujana DocumenatationDocument69 pagesSrujana DocumenatationCharitha IddumPas encore d'évaluation
- g5 - Tmax - Test - Pattern - Validation - User Guide PDFDocument286 pagesg5 - Tmax - Test - Pattern - Validation - User Guide PDFHARISH DAMARLAPas encore d'évaluation
- 1994 2006Document148 pages1994 2006pujamaitiPas encore d'évaluation
- Unit-7 (CAQC)Document8 pagesUnit-7 (CAQC)Abhishek Saini100% (14)
- Pattern Recognition CourseDocument2 pagesPattern Recognition CourseJustin SajuPas encore d'évaluation
- Unit 12 Algorithm Design & Problem-SolvingDocument12 pagesUnit 12 Algorithm Design & Problem-SolvingIm NimPas encore d'évaluation
- ChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveD'EverandChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurvePas encore d'évaluation
- Scary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldD'EverandScary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldÉvaluation : 4.5 sur 5 étoiles4.5/5 (54)
- AI and Machine Learning for Coders: A Programmer's Guide to Artificial IntelligenceD'EverandAI and Machine Learning for Coders: A Programmer's Guide to Artificial IntelligenceÉvaluation : 4 sur 5 étoiles4/5 (2)
- Artificial Intelligence: The Insights You Need from Harvard Business ReviewD'EverandArtificial Intelligence: The Insights You Need from Harvard Business ReviewÉvaluation : 4.5 sur 5 étoiles4.5/5 (104)
- Make Money with ChatGPT: Your Guide to Making Passive Income Online with Ease using AI: AI Wealth MasteryD'EverandMake Money with ChatGPT: Your Guide to Making Passive Income Online with Ease using AI: AI Wealth MasteryPas encore d'évaluation
- Generative AI: The Insights You Need from Harvard Business ReviewD'EverandGenerative AI: The Insights You Need from Harvard Business ReviewÉvaluation : 4.5 sur 5 étoiles4.5/5 (2)
- ChatGPT Millionaire 2024 - Bot-Driven Side Hustles, Prompt Engineering Shortcut Secrets, and Automated Income Streams that Print Money While You Sleep. The Ultimate Beginner’s Guide for AI BusinessD'EverandChatGPT Millionaire 2024 - Bot-Driven Side Hustles, Prompt Engineering Shortcut Secrets, and Automated Income Streams that Print Money While You Sleep. The Ultimate Beginner’s Guide for AI BusinessPas encore d'évaluation
- The Master Algorithm: How the Quest for the Ultimate Learning Machine Will Remake Our WorldD'EverandThe Master Algorithm: How the Quest for the Ultimate Learning Machine Will Remake Our WorldÉvaluation : 4.5 sur 5 étoiles4.5/5 (107)
- Mastering Large Language Models: Advanced techniques, applications, cutting-edge methods, and top LLMs (English Edition)D'EverandMastering Large Language Models: Advanced techniques, applications, cutting-edge methods, and top LLMs (English Edition)Pas encore d'évaluation
- Who's Afraid of AI?: Fear and Promise in the Age of Thinking MachinesD'EverandWho's Afraid of AI?: Fear and Promise in the Age of Thinking MachinesÉvaluation : 4.5 sur 5 étoiles4.5/5 (12)
- AI Money Machine: Unlock the Secrets to Making Money Online with AID'EverandAI Money Machine: Unlock the Secrets to Making Money Online with AIPas encore d'évaluation
- ChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindD'EverandChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindPas encore d'évaluation
- Artificial Intelligence: A Guide for Thinking HumansD'EverandArtificial Intelligence: A Guide for Thinking HumansÉvaluation : 4.5 sur 5 étoiles4.5/5 (30)
- 100+ Amazing AI Image Prompts: Expertly Crafted Midjourney AI Art Generation ExamplesD'Everand100+ Amazing AI Image Prompts: Expertly Crafted Midjourney AI Art Generation ExamplesPas encore d'évaluation
- System Design Interview: 300 Questions And Answers: Prepare And PassD'EverandSystem Design Interview: 300 Questions And Answers: Prepare And PassPas encore d'évaluation
- How to Make Money Online Using ChatGPT Prompts: Secrets Revealed for Unlocking Hidden Opportunities. Earn Full-Time Income Using ChatGPT with the Untold Potential of Conversational AI.D'EverandHow to Make Money Online Using ChatGPT Prompts: Secrets Revealed for Unlocking Hidden Opportunities. Earn Full-Time Income Using ChatGPT with the Untold Potential of Conversational AI.Pas encore d'évaluation
- Killer ChatGPT Prompts: Harness the Power of AI for Success and ProfitD'EverandKiller ChatGPT Prompts: Harness the Power of AI for Success and ProfitÉvaluation : 2 sur 5 étoiles2/5 (1)
- Artificial Intelligence: The Complete Beginner’s Guide to the Future of A.I.D'EverandArtificial Intelligence: The Complete Beginner’s Guide to the Future of A.I.Évaluation : 4 sur 5 étoiles4/5 (15)
- 2084: Artificial Intelligence and the Future of HumanityD'Everand2084: Artificial Intelligence and the Future of HumanityÉvaluation : 4 sur 5 étoiles4/5 (81)
- Midjourney Mastery - The Ultimate Handbook of PromptsD'EverandMidjourney Mastery - The Ultimate Handbook of PromptsÉvaluation : 4.5 sur 5 étoiles4.5/5 (2)
- Power and Prediction: The Disruptive Economics of Artificial IntelligenceD'EverandPower and Prediction: The Disruptive Economics of Artificial IntelligenceÉvaluation : 4.5 sur 5 étoiles4.5/5 (38)